浮筏气囊隔振系统弹性变形控制研究
2020-10-31秦文政
秦文政,施 亮
(1. 海军工程大学 振动与噪声研究所,湖北 武汉 430033;2. 船舶振动噪声重点实验室,湖北 武汉 430033)
0 引 言
工程上,某些大型浮筏气囊隔振装置的筏架最大弹性变形量可达3 mm,造成筏架上设备之间产生相对位移,不仅会危及设备的运行安全,还会增大设备振级,降低浮筏的隔振效果。采取一定的控制策略对气囊隔振器进行充、放气,可在一定程度上抑制筏架的弹性变形。
自提出智能气囊隔振装置技术[1]以来,国内学者在浮筏隔振系统气囊隔振器控制领域开展了大量研究工作,基本解决了气囊缓慢漏气、装置负载变化等工况下筏架姿态不平衡的问题,并且随着研究的深入,控制方法的快速性、稳定性、适应性和收敛性不断提高[2-8]。然而,上述文献均将筏架视为刚体,未考虑其弹性变形对隔振系统的影响,并且将气囊压力均匀性作为约束条件时筏架弹性变形较大。
为抑制浮筏气囊隔振系统筏架的弹性变形,本文提出一种基于位移传感器参数识别的气囊控制方法。1)在筏架弹性变形较大的位置增设位移传感器,并利用位移参数得到筏架弹性形态的评价指标;2)基于气囊压力和高度偏差选取需要调整的气囊编号,并采用模糊控制确定气囊调整时间;3)在试验平台上进行了验证并取得了较好的控制效果。该方法对抑制筏架弹性变形的气囊控制研究有一定指导意义。
1 弹性变形评价指标
将筏架视为柔性体,其实际位移包含刚体姿态位移和弹性变形位移,两者相互耦合,难以完全分离。同时,浮筏上设备重量分布不均、设备启停、气囊缓慢漏气等因素均可造成筏架弹性变形,当筏架产生弹性变形的原因不同时,通过调整气囊压力达到的最大抑制效果也不相同。因此,本文根据筏架变形特性增加位移传感器,并将各个传感器参数的标准差作为筏架弹性变形的评价指标,同时为提高控制算法对不同工况的适应性,在评价指标中引入筏架弹性变形的动态权重系数,即

2 控制器设计
由于气囊隔振器的容积较小,属于小流量、小体积的气动控制系统,传统针对大流量、大体积的流量和压力控制方法不再适用。因此,本文采用断续控制方法对气囊进行短时间的充、放气,达到抑制筏架弹性变形的目的。
系统的控制原理如图1所示。
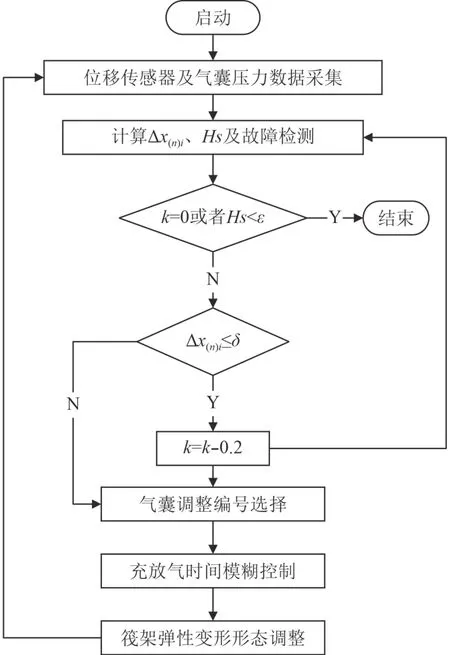
图1 筏架弹性变形控制原理图Fig. 1 Flow diagram of elastic deformation control for raft
为了简化控制器的设计和试验分析,提出以下假设:1)船体处于水平状态,没有横倾和纵倾;2)当浮筏姿态平衡且无弹性变形时,各位移传感器读数为0;3)浮筏系统载荷保持不变。
2.1 气囊选择策略

由于各个气囊之间存在耦合,依据文献[1]的研究可知,气囊高度偏差主要由2部分组成:一是由于气囊工作高度耦合造成的偏差,另一个是由于气囊气体摩尔数变化或者外界扰动造成的偏差,两者相互耦合,难以求解。对气囊实施充、放气主要目的是消除,并且相同下,气囊压力越大,所占比例就越小,所需控制量就越小。为准确选择需要调整的气囊,避免气囊频繁的充、放气,必须将气囊压力和气囊高度偏差综合考虑:

2.2 充放气时间模糊控制
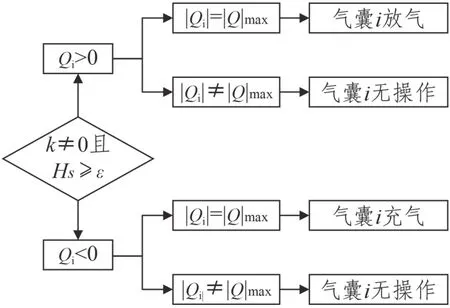
图2 气囊选择原理框图Fig. 2 Air spring selection principle
浮筏气囊隔振系统属于多输入、多输出的复杂控制对象,加之系统采取断续充放气,因而传统的控制方法难以取得较好的控制效果[12]。本文采用模糊控制技术控制气囊的充放气时间,以气囊广义高度偏差和气源压力与气囊压力差作为输入量,以电磁阀开启时间作为输出量。表示为:

3 试验研究
本文试验装置为某型船舶浮筏气囊隔振装置2∶1缩比试验平台,试验装置结构示意图如图3所示。筏架尺寸为5.54 m×3.48 m×0.191 m,沿X轴对称垂向布置12个额定载荷为8 T的气囊隔振器且其内均装有压力传感器,另布置6个垂向位移传感器,1#~4#用于监测筏架刚体姿态,5#,6#用于监测筏架弹性变形,通过1套液压加载装置调整系统载荷,系统额定载荷为96 T。

表1 模糊控制规则表Tab. 1 Fuzzy control rule

图3 浮筏气囊隔振装置示意图Fig. 3 The sketch of floating raft air spring isolation device

为有效验证控制方法的正确性,试验前对各个位移传感器的零点进行校准,消除筏架初始变形的影响;设置相邻2次的充、放气间隔为5 s,以减小浮筏振荡产生的干扰;终止状态为动态综合判据取0.2 mm,的 收敛指标取值为0.1 mm。将系统载荷调整至96T、气囊充气至额定气压后进行试验,试验结果如图4所示。
可以看出,对气囊隔振器进行控制之前,筏架表现为中部凸起的弹性变形,最大变形量为1.37 mm。采用本文的控制方法对气囊进行16次调整后,各个位移传感器参数值基本在-0.25~0.2 mm之间,筏架弹性变形的抑制效果明显。试验结果表明,本文控制方法可以有效抑制筏架的弹性变形。
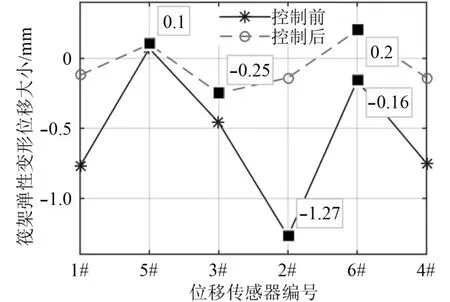
图4 筏架弹性变形控制效果试验Fig. 4 Test of elastic deformation control effect of raft
4 结 语
本文对抑制浮筏气囊隔振系统筏架弹性变形的气囊控制方法进行研究,提出一种基于位移参数识别的气囊控制方法。考虑到筏架弹性变形的复杂性,提出一种弹性变形的评价指标,并引入了动态权重系数以提高控制算法的适应性。根据气囊广义高度差选取需要调整的气囊编号,并采用模糊控制确定气囊调整时间。试验结果表明,该控制方法对筏架弹性变形的抑制效果较好,具有较高的控制精度。