基于ADRC的永磁同步电机模型预测转矩控制系统
2020-10-29陆畅梁骅旗
陆畅 梁骅旗


【摘 要】针对三相永磁同步电机(PMSM)系统,提出了基于自抗扰技术的模型预测转矩控制(MPTC)策略。采用矩阵变换器驱动PMSM的系统结构,以提高电机系统输入侧功率因数(PF);用MPTC选择最优电压空间矢量使系统有良好的转矩、磁链控制效果;ADRC速度调节器代替PI速度调节器能够使MC驱动的PMSM系统稳定运行,具有较好的转速和转矩控制效果,该策略具有更强的抗负载干扰能力和跟踪给定转速变化的能力。最后,通过Simulink仿真平台检验该策略的正确性和有效性。
【Abstract】For the three phase permanent magnet synchronous motor (PMSM) system, a model predictive torque control (MPTC) strategy based on active disturbance rejection technology is proposed. The matrix converter is used to drive the PMSM system structure to improve the input power factor (PF) of the motor system. MPTC is used to select the optimal voltage space vector so that the system has good torque and flux control effect. The ADRC speed regulator can replace the PI speed regulator to make the MC-driven PMSM system run stably, with better speed and torque control effect. The strategy has stronger ability to resist load interference and track the change of given speed. Finally, the correctness and effectiveness of the strategy are verified by Simulink simulation platform.
【關键词】永磁同步电机;矩阵变换器;模型预测;自抗扰技术
【Keywords】permanent magnet synchronous motor; matrix converter; model prediction; active disturbance rejection technology
【中图分类号】TM301 【文献标志码】A 【文章编号】1673-1069(2020)10-0180-04
1 引言
永磁同步电机(permanent magnet synchronous motor, PMSM)具有重量轻、损耗小和功率因数(power factor,PF)高、运行可靠等优点,已经在数控机床、电动汽车以及压缩机等领域得到普遍的应用。矩阵变换器(matrix converter,MC)具有体积小、结构简单、PF可调以及谐波污染小等特点,因而在电动机驱动、移动电源和发电系统等领域广泛应用。
基于PMSM控制系统研究现状,结合市级、院级科研项目,本文针对PMSM系统,考虑到系统需要较强的抗干扰能力,PF接近1,电流输入输出波形与正弦函数一致,稳定快速的转矩动态响应以及更好地跟踪给定转速变化能力等要求,设计了基于ADRC的PMSM的MPTC控制策略。
2 MC驱动PMSM系统数学模型
2.1 永磁同步电机的动态模型
本文在同步旋转d-q坐标系下,建立了永磁同步电机数学模型(理想条件为:磁路不饱和、磁场空间按正弦曲线分布,忽略磁滞和涡流影响)。则PMSM在d-q坐标系下的数学模型如式(1)所示。
式(4)和式(5)中,ψd、ψq分别为d-q坐标系下的定子磁链分量,ψs为定子磁链。
2.2 矩阵变换器拓扑结构及其数学模型
等效交-直-交结构
矩阵变换器输入、输出侧的电流电压可表示为:
Uo=[uA uB uC]T=M·[ua ub uc]T=M·Ui (6)
Ii=[ia ib ic]T=MT·[iA iB iC]T=MT·IO (7)
M=SAa SAb SAcSBa SBb SBcSCa SCb SCc
式(6)和式(7)中,Smn(m∈{A,B,C},n∈{a,b,c}),若Smn=1表示开关接通,若Smn=0表示开关断开;M为MC传递函数矩阵。
MC在工作时,需要遵循输出相电路不可断路、输入相电路不可短路的原则,可得到如式(8)所示的公式:
Sma+Smb+Smc=1 m∈{A,B,C} (8)
由上式可以得到MC的9个双向开关的27种状态,其中有21种状态可用于调节电压输出,6种状态不能调节电压。MC驱动的MPTC系统不仅可以输出更多的电压矢量,使输入侧PF达到1,还可以有效减小转矩和磁链脉动。为了进一步研究,将MC等效为如图2所示的等效交-直-交结构。
3 基于ADRC的MPTC系统设计
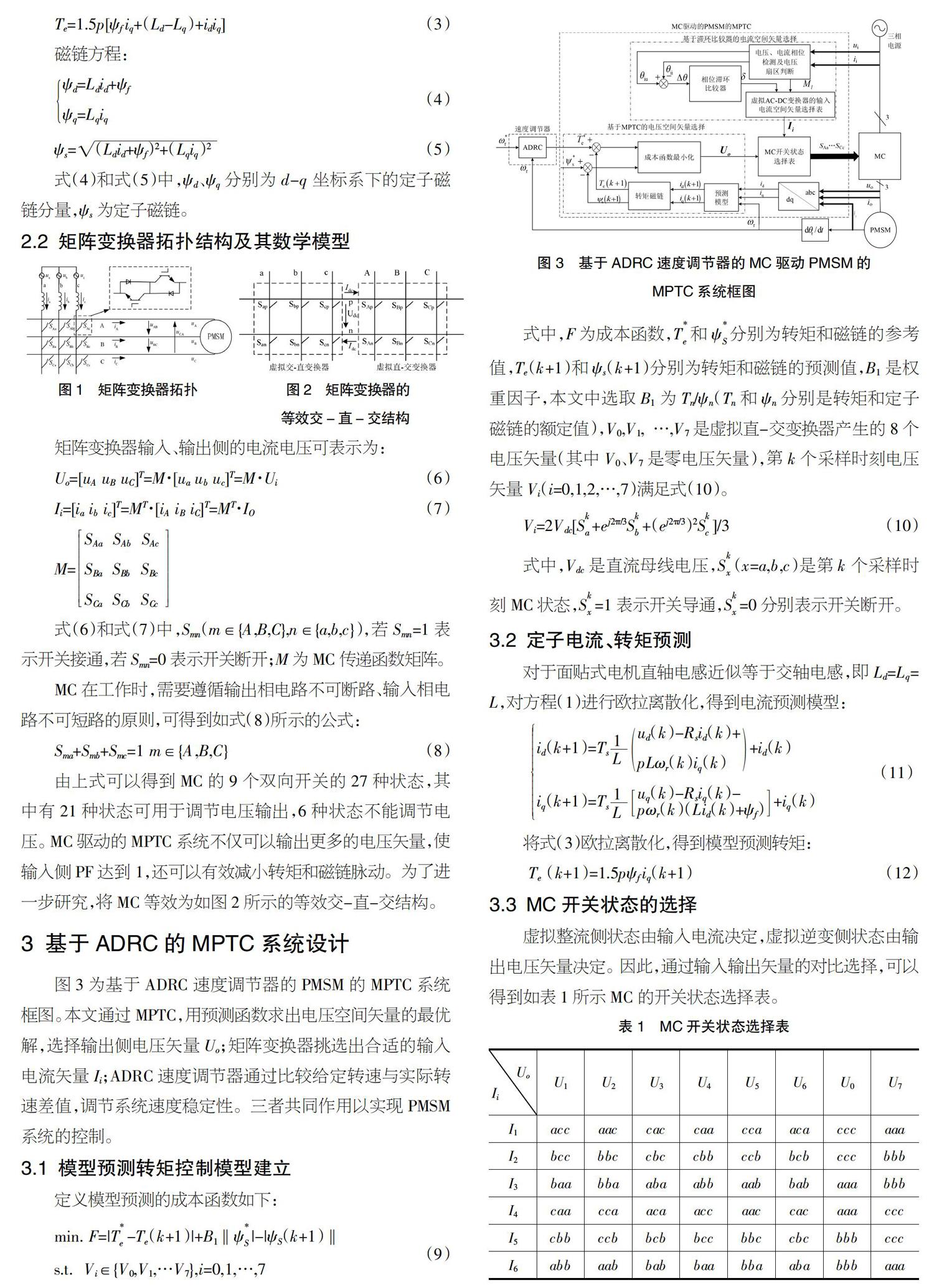
图3为基于ADRC速度调节器的PMSM的MPTC系统框图。本文通过MPTC,用预测函数求出电压空间矢量的最优解,选择输出侧电压矢量Uo;矩阵变换器挑选出合适的输入电流矢量Ii;ADRC速度调节器通过比较给定转速与实际转速差值,调节系统速度稳定性。三者共同作用以实现PMSM系统的控制。
3.1 模型预测转矩控制模型建立
定义模型预测的成本函数如下:
将式(3)欧拉离散化,得到模型预测转矩:
Te (k+1)=1.5pψf iq(k+1) (12)
3.3 MC开关状态的选择
虚拟整流侧状态由输入电流决定,虚拟逆变侧状态由输出电压矢量决定。因此,通过输入输出矢量的对比选择,可以得到如表1所示MC的开关状态选择表。
3.4 ADRC速度调节器设计
令x=ωr,y=x,可得如(13)所示的状态方程。
式中,转速y为系统输出,Te为系统输入电磁转矩。
在实际工况中,被控对象会受到外部环境影响和自身内部机械结构之间摩擦的干扰,影响控制器的控制效果。假设以上扰动为f(t),如式(14)所示。
根据以上分析,同时简洁系统硬件结构,提高运算速度,本文设计如图4所示的速度调节器。
4 仿真与分析
为验证所设计系统的正确性和有效性,采用Matlab/simulink进行仿真验证,所采用的PMSM各项参数如表2所示。
仿真中PMSM输入电压为220 V、频率为50 Hz,采样周期为10μs。本文的仿真研究方案为:为说明ADRC速度调节器系统较PI速度调节器有较好的鲁棒性和抗扰动能力,就抗负载变化能力和跟踪给定转速变化情况进行比较分析。
4.1 ADRC与PI速度调节器抗负载变化能力比较
为了确保实验数据的准确性、有效性,调节PI和ADRC速度调节器参数,使得2个系统在初始动作时要有相同的瞬时响应特性(调节时间相同、无超调量),此时PI参数取值为:kp=0.3,ki=0.22;给定系统动作速度为1000r/min,初始转矩为0N·m,在0.1s时转矩突变为2N·m。
通过比较图5a和图5b可以看出,两个系统都有比较快速的转矩响应速度,但是ADRC速度调节器的波动较小,波形较为平滑,当负载转矩在0.1s变为2 N·m时,两系统转矩均能够在极短的时间内达到目标转矩;从图6a、图6b中可以看出,两系统都有较快的速度响应且无超调量,在0.1s转矩变化时,转速均有小幅度跌落,但是采用ADRC速度调节器的系统,其转速恢复速度快。因此,ADRC速度调节器比PI速度调节器有更强的抗负载扰动能力。
4.2 ADRC与PI速度调节器跟踪给定转速变化能力比较
给定系统开始启动时负载为1N·m,期望转速为1000r/min,在0.1s时转速突变1200r/min,在0.2s时转速突降至900r/min。
比较图7a、7b可以看出,当系统正常运行时发生转速变化现象,两个控制器均能快速跟踪给定转速,但是PI速度调节器在0.2s时,其转速有小幅度的超调量,而ADRC速度调节器转速响应平稳无超调;观察图8a和图8b两个系统的转矩响应,采用PI的系统,其转矩响应幅度较大且在0.2s时会产生转矩突变,而ADRC系统可以快速平稳地进行响应。因此,改进后的控制系统对转速变化有更好的控制效果。
5 结论
本文针对MC驱动的PMSM系统,设计基于ADRC的MPTC控制策略。MC驱动方式可以保证系统输入侧PF为1,MPTC方法能够使系统有良好的转矩、磁链控制效果,并提高系统控制性能。对于ADRC速度调节器和PI速度调节器来说,前者能使MPTC的转矩脉冲大幅降低,强化系統的跟踪期望转速能力和抵抗转矩变化的能力。仿真结果验证改进控制系统的有效性和准确性。
【参考文献】
【1】李耀华,秦辉,苏锦仕,等.表贴式永磁同步电机有限集模型预测转矩控制成本函数研究[J].电机与控制应用,2019(9):12-18.
【2】王超,李世华,田玉平.基于自抗扰技术的永磁同步电机直接转矩控制[J].电气传动,2007(07):14-17.
【3】张露.基于自抗扰技术的永磁同步电机直接转矩模糊控制[D].大连:大连交通大学,2017.
