基于六端口的声表面波谐振器查询系统研究
2020-10-28何红,赵佐
何 红, 赵 佐
(1.西安航空学院 电子工程学院,陕西 西安 710077;2. 西北工业大学 计算机学院,陕西 西安 710072)
0 引言
声表面波(SAW)传感器[1]在当前工业和自动化测量系统中发挥着重要作用。其常被用于在恶劣环境中对各种物理量(如温度、压力、张力和扭矩)进行遥感探测[2]。反射延迟线SAW传感器需宽带射频(RF)查询脉冲,而谐振式SAW传感器是利用窄带RF脉冲进行快速查询[3],可准确地检测温度或压力等物理量的变化。
迄今为止,研究人员已提出各种不同的谐振式SAW传感器查询方法[4-6]。当前系统首先通过发送脉冲窄带激励,对谐振器进行“充电”,然后获取衰减信号,由此直接测量自谐频率。为确定频率,一般通过计算快速傅里叶变换(FFT),在数字域中进行信号处理[6]。这些读取器的谐振器响应时间短(通常仅持续几微秒),且要求千赫级的频率分辨率。对于433 MHz频带中的SAW谐振器,目前先进的高速谐振式SAW读取器可实现高达16 kHz的测量值更新率[7]。但这些读取器需要2个并行的数字信号处理器(DSP)来计算FFT,并需要1个额外的微控制器来进行系统管理。
提出的查询方法是利用SAW谐振器的衰减响应信号来确定其谐振频率。本文所提方法基于瞬时频率测量(IFM)的概念[8],使用了一个低成本的六端口干涉仪和一条已知长度的单延迟线,将引入的相移与非延迟信号相比,从而进行频率估计。在模拟域中对信号进行处理,因此不需要计算FFT,且系统成本较低,不需要复杂的信号处理。实验结果验证了所提设计的优越性。
1 系统设计
1.1 理论概念
瞬时频率测量的核心理念是将位置信号分割为两部分,并对其中一部分使用延迟线,从而在两部分之间产生依赖于频率的相移。其后,可利用鉴相器对该相移进行评估,通过精确的延迟线长度知识,计算出未知信号的频率。基于六端口的SAW查询系统的概念图如图1所示。将短连续波(CW)查询脉冲,通过一个循环器(也可替换为RX/TX转换器或RF耦合器)发送至SAW谐振器。为激发振荡,查询信号的频率必须接近传感器的谐振频率。在快速关闭激发信号后,SAW在其谐振频率处开始衰减。通过功率分配器对该响应信号进行两等分。其中一部分信号被直接馈入六端口,另一部分则在进入第2个端口前延迟τd。
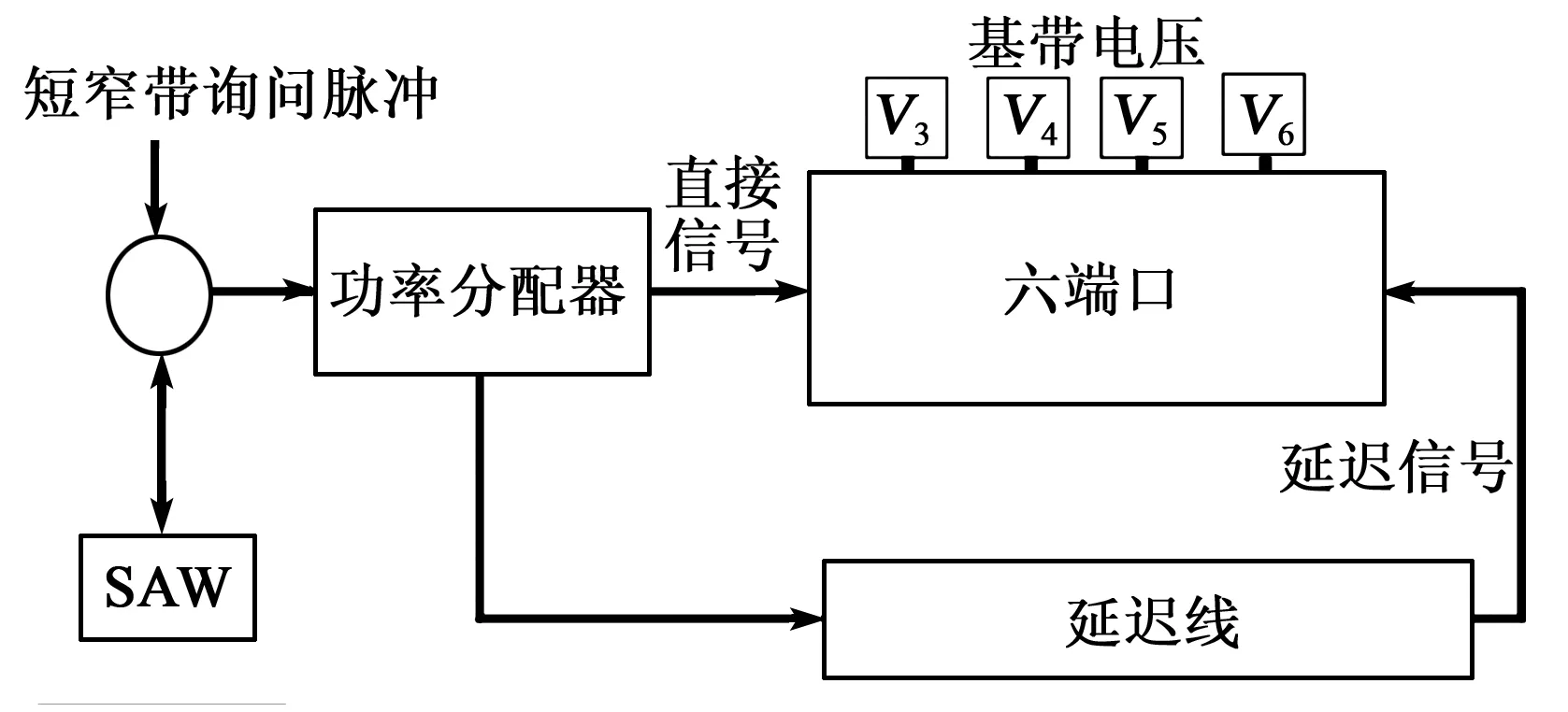
图1 SAW查询系统的示意图
由此在2个信号之间会产生依赖于频率f的相对相移Δφ,即
Δφ=2πfτd
(1)
通过六端口干涉仪对相位差进行评估,其中在0°、90°、180°和270° 4个不同的相对相移下对直接信号(I1)和延迟信号(I2)进行叠加,并通过功率检测器将RF信号下转换为4个基带电压(V3~V6)。这些DC电压形成一个复向量z,即
z=(V3-V4)+j(V5-V6)
(2)
最后可通过计算复向量的幅角,得到输入端口处的相位差:
Δφ=arg(z)
(3)
利用延迟线的精确时延td,通过重写式(1)推导出原始信号的频率:
(4)
当延迟线有效长度超过要测量最高频率的波长时,该计算会出现不确定性。一般系统的非模糊带宽fB是有限的[9],即
(5)
1.2 六端口和功率探测器
目前,六端口接收器得到广泛应用的主要原因是其具有较好的相位分辨力,支持宽带操作及简单的电路复杂度,因此,系统成本较低[10]。相关研究表明[10],利用相对较大的系统带宽(一般至少为其操作频率的10%)易实现六端口系统。对于SAW感测应用,这些设备通常仅用于带宽很窄的工业、科研和医疗(ISM)频段。但由于需测量的信号具有快速时变的特点,必须考虑探测器带宽和动态范围:加载SAW谐振器的振幅会呈指数下降。时间常量τSAW取决于品质因数(QSAW)和SAW的频率,即
(6)
在2.4 GHz ISM频段中,本文测得加载SAW谐振器的QSAW≈2 300。因此,对于这些设备,τSAW略大于300 ns。当激发信号在t= 0处被关闭时,SAW幅值A(t)为
A(t)=Amax·exp(-t/τSAW)
(7)
当功率检测器使用全动态范围PDdr时,功率探测器可跟踪SAW的指数衰减的最大测量时长tm,max为
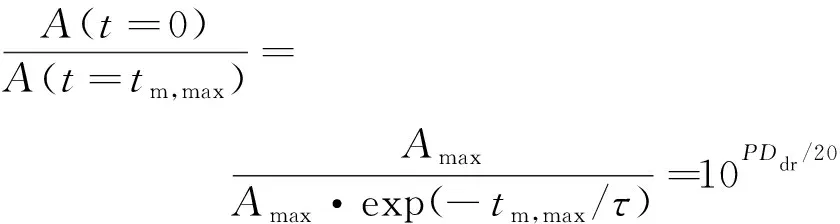
(8)
(9)
功率探测器最大动态值为45 dB时,SAW的测量时间上限tm≈1.5 μs。为捕捉这种短时无畸变信号,检测器和基带带宽必须保持较高水平。
1.3 延迟线
延迟线的延时是整个系统的重要设计参数,一方面,延迟线应尽可能长,因为系统的整个测量动态范围映射到一个非模糊频带中。在对谐振式SAW传感器进行频率测定时,仅需很窄的非模糊带宽,而传感器的频偏很小,通常小于1 MHz。必须接近传感器自身谐振频率对其进行激发,粗频为已知,可应用于式(4)中模糊计算偏移量。假定SAW传感器的最大频偏为1.5 MHz,则延迟线最大延时τd=670 ns,有效长度de=200 m(以真空中的光速计)。虽然该数值看起来较高,但由于基片中声波速度较慢,这样的延时可作为SAW的有效延时[11]。
另一方面,应该将延迟线长度维持在尽可能短的水平。其原因是:随着延迟线长度增加,传输损失也会变大,这会降低测量精度。从空间和成本因素考虑,也应选取较短的延迟线。此外,延迟线的长度越长,最大测量时间会越短,因为参考信号和延迟信号必须同时存在于六端口处,以提取两者间的相位差。同时,由于传感器振幅的指数衰减,较长的延迟线会导致在延迟信号到达六端口的第二个输入前,参考端口处的信号振幅已减小。
2 实验与分析
2.1 参数与实验装置
本文搭建了基于集总元件的2.4 GHz六端口以进行测量,其中包含4个商用的温度补偿有功功率探测器,最大动态值(±1 dB线性区域)为45 dB。系统的技术参数如表1所示。
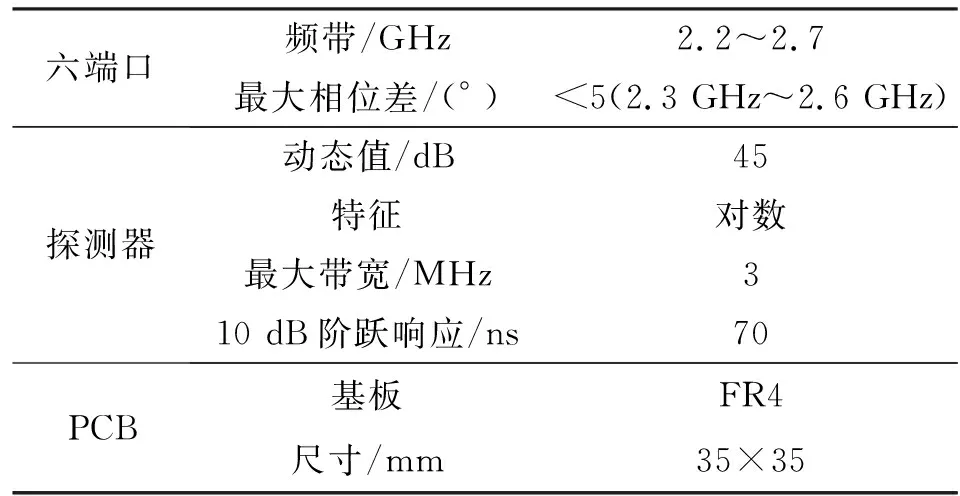
表1 六端口设计的参数说明
利用低成本的RG58U SMA线缆(几何长度dg=10 m)来实现延迟线。其有效磁导率为r=2.26,因此,de=15 m,延迟约为50 ns。该数值可实现较好的权衡。
图2为测量装置。将2个SAW谐振器(SAW1,SAW2)安装在弯梁上,以测量其在微差配置下的机械应力。在通过一个测微螺旋施力时,一个SAW被拖曳,同时另一个SAW被压缩。这样能提高系统的准确度和敏感度,因为影响到2个SAW的异常干扰在某种程度上被抵消了。使用一个信号发生器来生成激发信号,连续波脉冲持续时间为1.5 μs,射频功率为0。为了对某个SAW进行查询,需要使用1个额外的RF单刀双掷(SPDT)开关,因为2个SAW的谐振频率过于接近以致于无法单独激发某个SAW。利用功率分配器对被激发的SAW传感器的响应信号进行分割。将信号的一部分直接馈入六端口干涉仪的第1个输入端口,另一部分则在馈入第2个输入端口前,被10 m的SMA线缆所延迟。采用1个四通道数字存储示波器(DSO)采集基带信号。
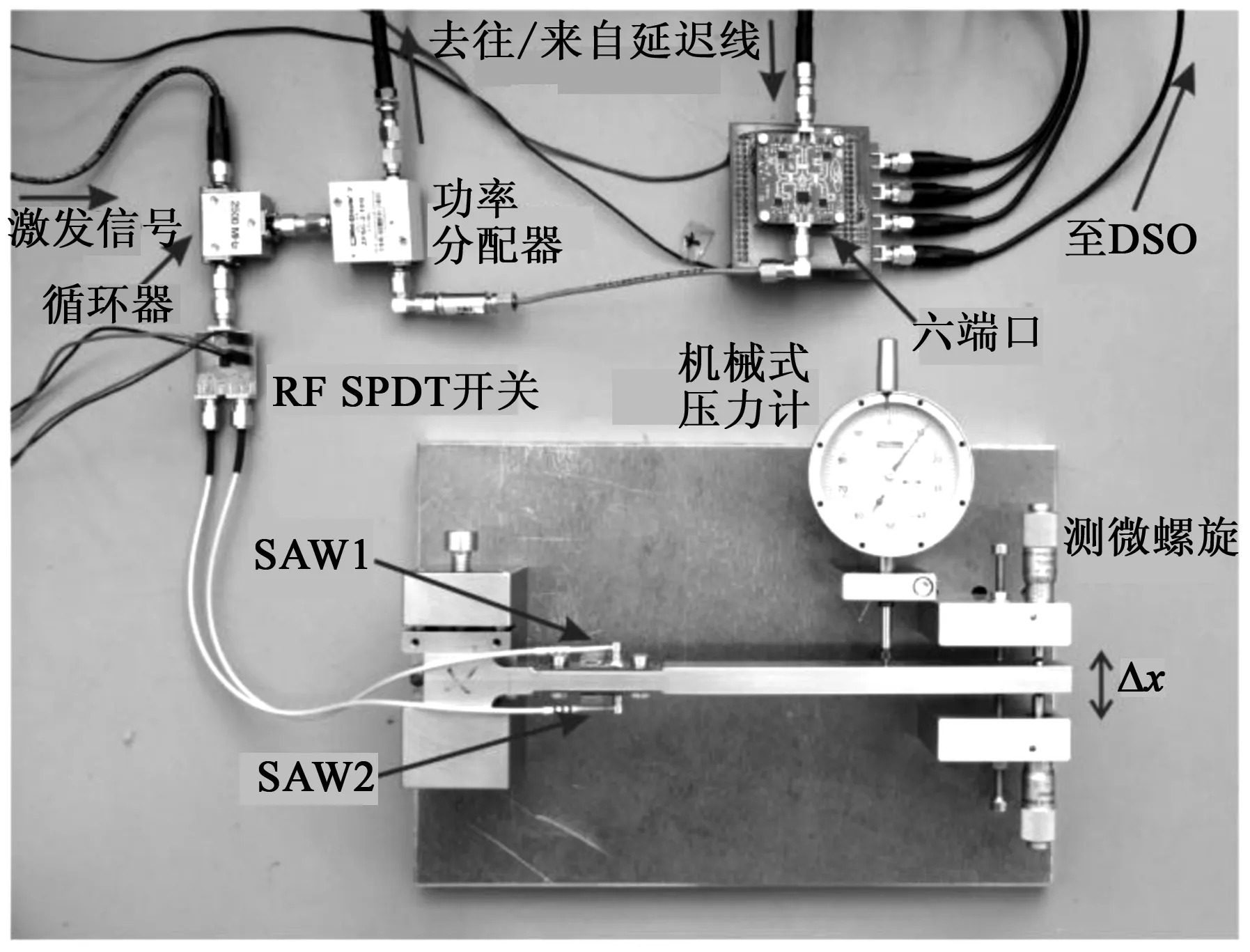
图2 测量装置图
实验首先给出不同激发频率下的单个SAW的实验结果,然后展示微差配置下,弯梁上的机械应力的测量结果。使用非线性系统进行测量。由于延迟线具有温度敏感性,且群时延为每千条线缆80×10-6。所以线性化会随着时间推移而漂移。若需要进行温度稳定的长期测量,需要利用合适的现场线性化技术解决该问题。
2.2 单个SAW传感器的信号查询
在SAW的估计谐振频率附近,进行了±1 MHz的精细步进频率扫描。图3为测得的传感器响应及激发脉冲的参考测量结果。与预期相符,传感器响应的频率不受激发频率的影响。如果将标准偏差纳入考量,则应该在传感器谐振频率附近对其进行激发,因为这样会使谐振器采集到大部分能量,系统能表现出最优测量精度。最低标准偏差σSAW≈17 kHz,该数值与约7 ×10-6的RF频率相关。
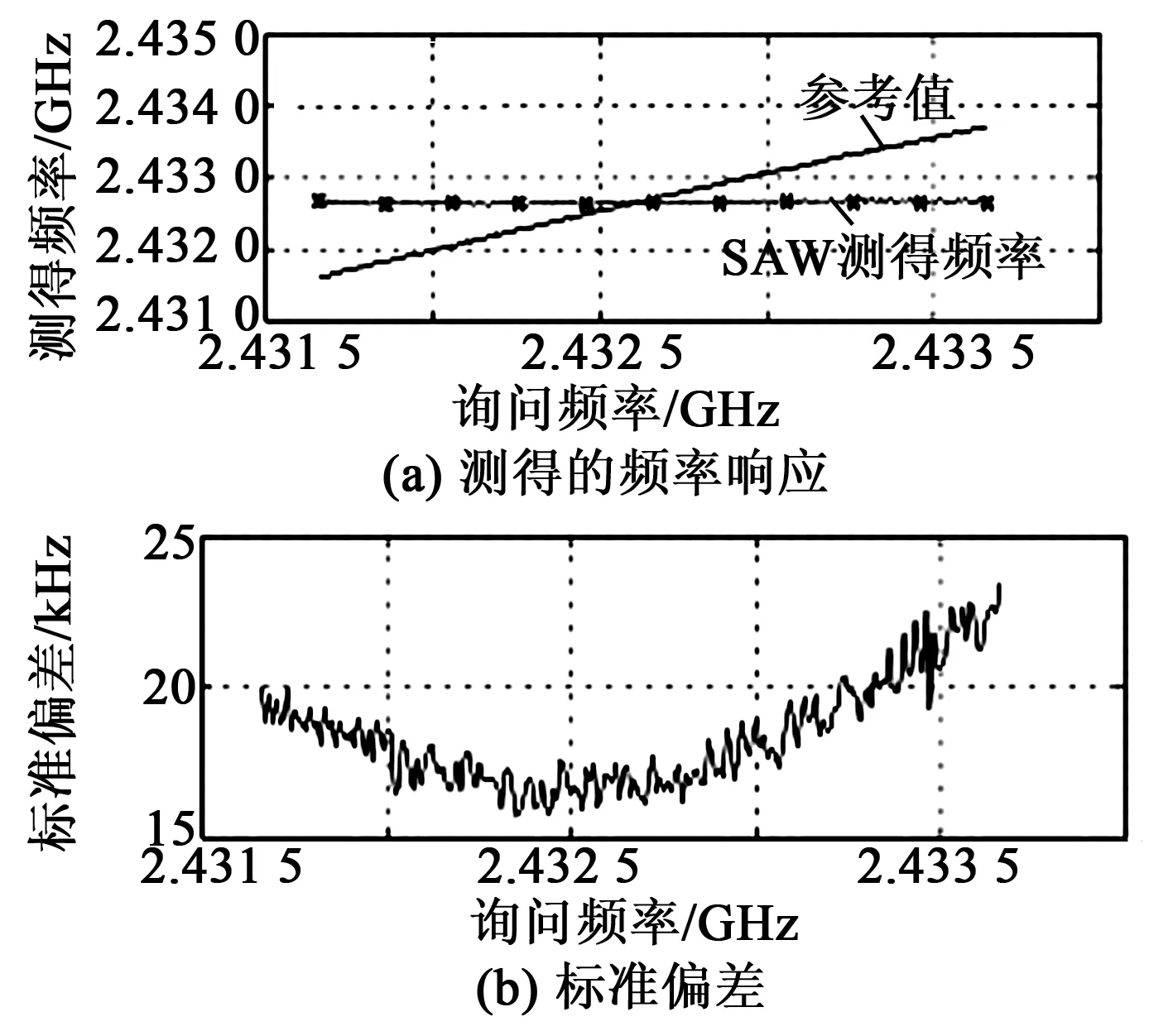
图3 不同查询频率下测得频率响应和标准偏差
2.3 弯梁上应力的微差测量
根据文献[12]的研究可知,微差测量能显著提升系统的准确度和敏感度。对于弯梁测量案例,2个SAW间的频差Δfm与施加的机械应力成正比,因为一个传感器被压缩,而另一个传感器则被拉伸。利用2个测微螺旋,对弯梁施加了共计181次偏转。使用一个精密刻度量规得到偏转的机械参考测量值。每10 μm测量1次,由此在参考测量点处得到整体最大偏转Δx= ± 900 μm。为了提高示波器采集基带电压时模数转换器(ADC)的分辨率,在采集过程中直接在示波器中进行内部过采样,并取256次的均值。
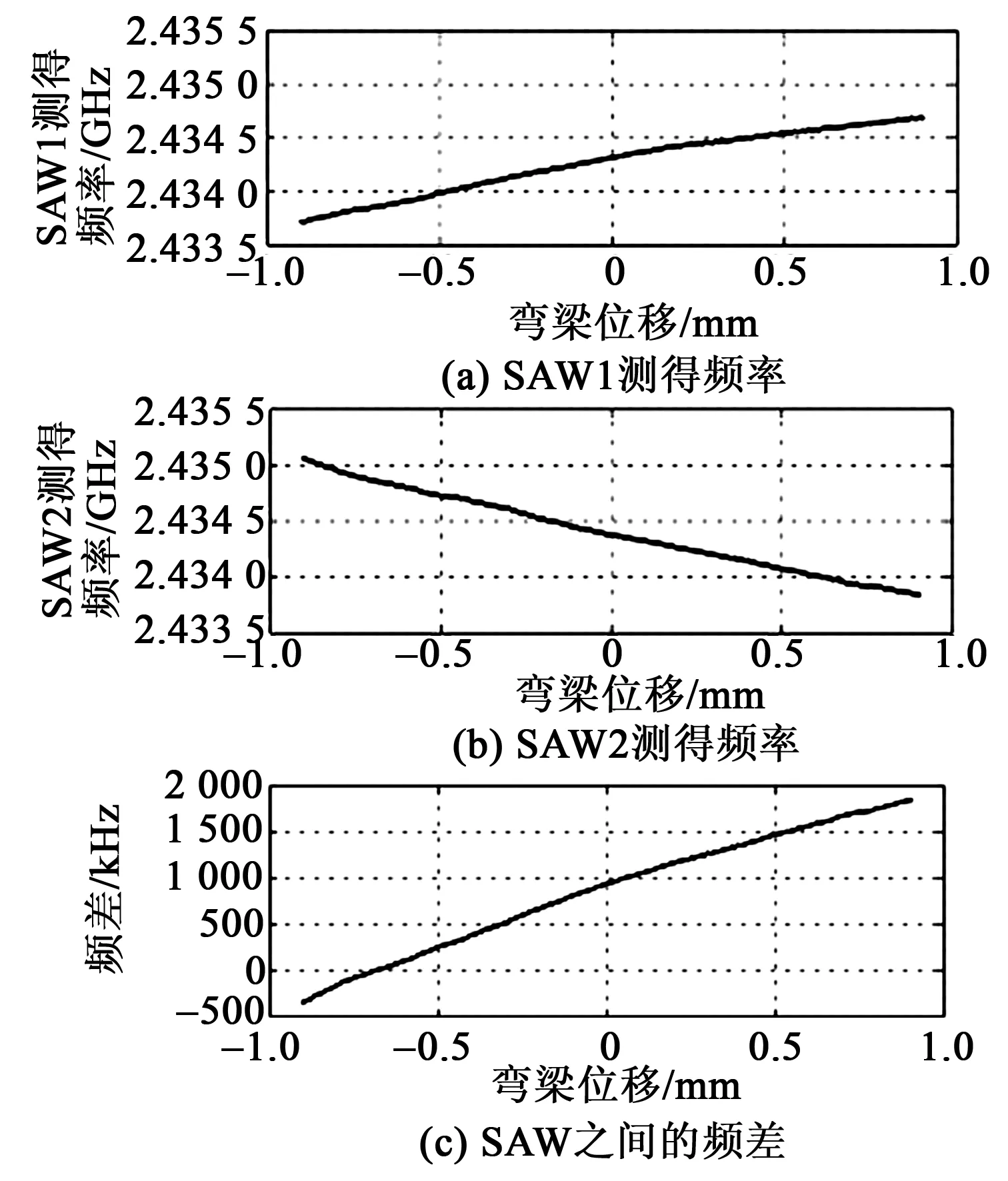
图4 弯梁上机械应力的微差测量结果
图4(a)、(b)分别为2个SAW的谐振频率随着弯梁位移变化的测量结果。由图可知,由于采用了微差测量,随着力的施加,一个SAW测得的频率增加,另一个SAW测得的频率则相应降低。第1、2个SAW表现出的最大频率偏移分别为0.97 MHz和1.22 MHz。此外,2个曲线表现出了非线性。这表明2个SAW间的安装和匹配并不完美,且六端口系统不是理想的线性。但这已能完成概念证明。图4(c)为计算出的2个传感器间的频差,全刻度频差Δfmax=2.18 MHz。在未施加任何应力的情况下,Δf≈940 kHz,单次测量的标准偏差σf=21.9 kHz,由此全刻度随机误差约为1%。
2.4 时域测量
图5为对于以SAW的谐振频率附近约100 kHz为中心的单个询问脉冲,六端口的4个基带电压的测量结果。由图可看出从约1.5 μs开始谐振器的延迟“响应”。由于采用了对数功率检测器,基带信号的振幅呈线性下降。测量结果证明了第1.1节的理论计算的有效性,可在约3 μs内执行对单个SAW的询问。
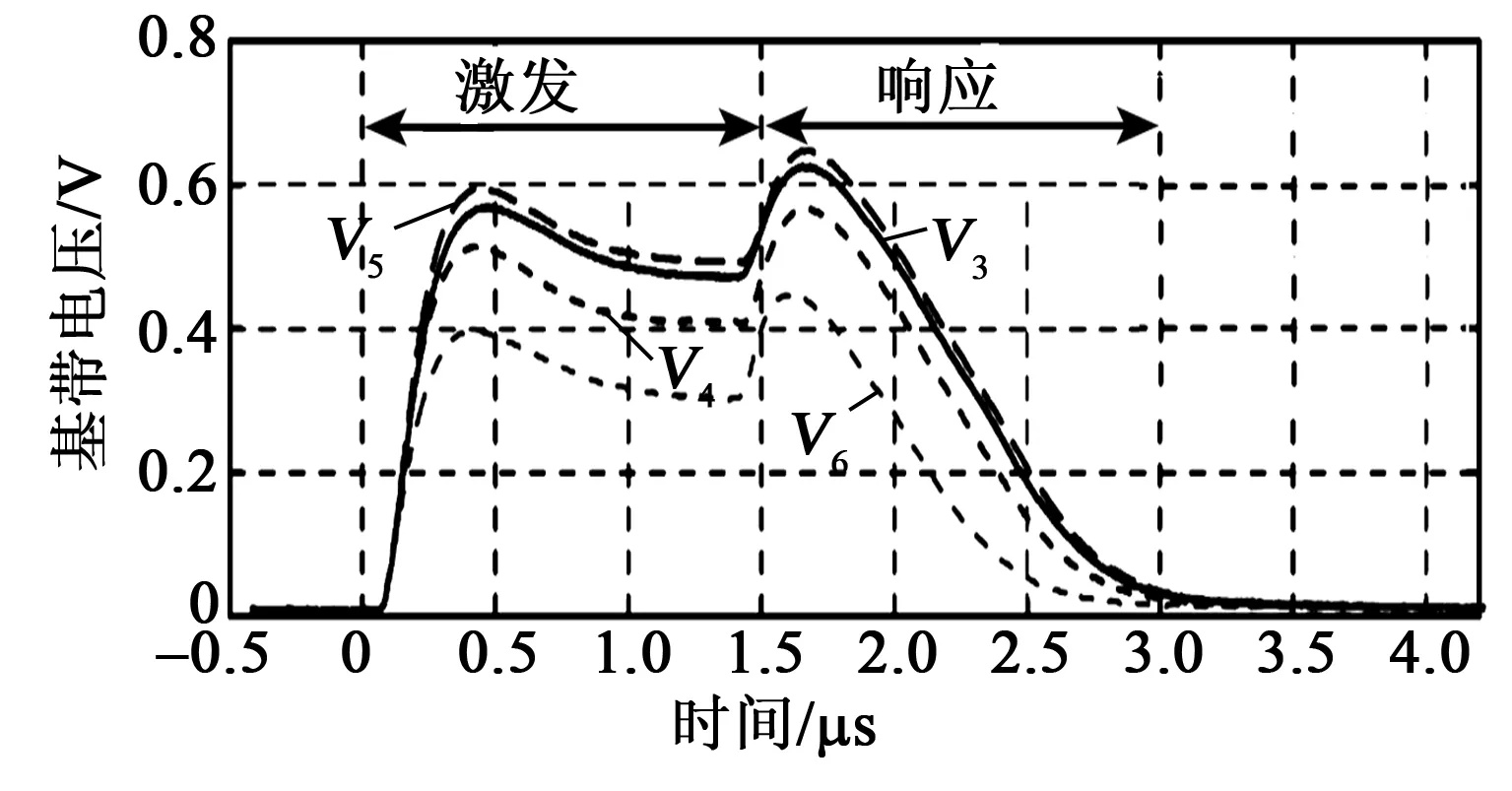
图5 4个基带电压的测量结果
2.5 延迟线信号强度的损失情况
利用低成本的RG58U SMA线缆(dg=10 m)来实现延迟线。其r=2.26,因此,de=15 m,延迟约为50 ns。该数值可实现较好的权衡。通过向量网络分析器对线缆进行表征,图6为延迟线信号强度的损失情况测量结果。

图6 不同频率下的延迟线信号强度损失情况
由图6可知,2.4 GHz ISM频段中的输入返回损失小于-15 dB,其他频段也均小于-15 dB;对于不同频率,传输损失区间为[-8.9 dB,-8.7 dB]。因此,延迟线的信号强度所受影响很小,从而对本文方法影响较弱。
3 结束语
本文提出了利用低成本六端口干涉仪基于瞬时频率测量的高速谐振式SAW读取器的设计方法。分析了六端口和延迟线的设计考量,执行了微差测量装置中确定弯梁上机械应力的实验。实验结果表明,基于六端口的IFM可作为传统的基于FFT SAW读取器的有效替代方案,且能提高更新率。