基于近景摄影测量技术的地下巷道三维建模
2020-10-26连增增张瑞瑞张宏贞3
刘 杰 连增增,2 何 荣 张瑞瑞 张宏贞3
(1.河南理工大学测绘与国土信息工程学院,河南焦作454000;2.东南大学仪器科学与工程学院,江苏南京210000;3.中国矿业大学环境与测绘学院,江苏徐州221116)
进入21世纪以来,随着计算机技术的快速发展与广泛应用,大幅推进了矿山数字化建设进程[1-2]。巷道系统是矿山三维虚拟场景的重要组成部分,是构建数字矿山的基础,通过将现实中各种数据转换成为有一定内在逻辑关系的过程,对于科学合理地组织各类矿山信息,将海量异质的矿山信息资源进行全面、高效和有序地管理和整合起着重要作用[3]。对于矿山信息系统,主要涉及矿山资源开采过程中的掘进巷道和地层两类矿山井下空间目标,其中巷道是矿井开采过程中最重要的通道,是整个矿井的核心部分。传统根据巷道实测尺寸数据进行三维建模的方法,不仅效率低下,而且成本高昂[4]。因此,如何快速准确地构建矿山巷道三维模型就成为数字矿山建设的关键问题之一。近景摄影测量技术是通过摄影和相关技术来处理图像,从而获得被摄物体的大小、形状和运动状态的一项技术[5-8]。基于该技术的三维建模就是在小于100 m的范围内进行摄影量测,然后从多张影像上恢复空间点三维坐标,并对同一个物体在不同视点拍摄的多张照片进行匹配[9-12]。此外,该技术通过非接触的方式可以对各种物体结构进行测量,并对这些结构进行后期建模。因此,本研究采用近景摄影测量技术进行地下巷道三维建模研究。
1 近景摄影测量相关原理
利用近景摄影测量进行几何定位的基本原理是立体像对的前方交会[13-14]。采用相机在不同时刻或位置获得同一目标的图像,通过分析图像间的几何约束关系解算出目标表面的三维坐标信息,从而构建拍摄目标的三维模型,主要流程包括近景照片采集、图像数据处理及所摄目标物三维模型重建。其中,在图像数据处理阶段涉及到两个重要方程,即共线条件方程和共面条件方程[15]。
1.1 共线条件方程式
当像点、物点及投影中心三点共线时,物点和像点的中心投影方程式为共线条件方程[16-18]。其中每条光线都可以组成两个共线方程式:

式中,x,y为像点的像平面坐标;x0,y0,f为影像的内方位元素;XS,YS,ZS为摄站点的物方空间坐标;X,Y,Z为物方点的物方空间坐标;ai,bi,ci(i=1,2,3)为影像的3个外方位角元素组成的9个方向余弦值。
式(1)一般可以简写为


误差方程为

式中,v为像点坐标改正数矩阵;Δ1是摄影外方位元素各参数的改正数矩阵;Δ2是物体空间坐标的改正数矩阵,B1,B2分别为系数矩阵;l是观测值与其近似值的差值矩阵。
法方程为

式中,xT=[Δ1Δ2];B=[B1B2]P;B为系数阵;P为观测值的权阵。
空间后方交会是已知像片的内方位元素和至少3个地面点坐标及其相应的像点坐标,利用共线方程式求解出像片的6个外方位元素[19]。空间前方交会是利用2张以上的像片来计算地面点的三维坐标[20],该方法需要已知像点的坐标和像片的内、外方位元素。共线方程式在空中三角测量、数字测图等领域都应用广泛,它是摄影测量中较为重要的方程式。
1.2 共面条件方程式
表达像片摄影基线和同名光线在同一平面内的方程式叫做共面条件方程式[21]。通过向量表示为


式中,Bx,By,Bz是S'在左片像空间辅助坐标系S-uvw中的坐标;u,v,w是左片像点a在左片像空间辅助坐标系S-uvw中的坐标;u',v',w',是右片像点a'在右片像空间辅助坐标系S'-u'v'w'中坐标。

误差方程式为其中,v是像点坐标改正数矩阵;A为像点坐标改正数的系数阵;Δ是相对定向的待定参数(Δ w,Δφ,Δk,by,bz)矩阵;l是常数项矩阵。
2 试验分析
2.1 试验场地概况
本研究选择河南理工大学老校区防空洞的一段巷道(宽2 m,高1.98 m、长7.95 m)进行试验,该段巷道与地表的垂直距离约15 m。该段巷道与普通矿山巷道形状相似,环境黑暗潮湿,巷道狭窄,局部有地下渗水,观测条件极差。巷道所在区域为砖砌结构,纹理较为规整单一。该巷道底板为土质结构且凹凸不平,这些客观环境条件给三维建模带来了很多困难。
2.2 三维建模流程
数据获取后,将所拍摄的像片导入到软件Context Capture(简称“CC”)进行处理,先提交空中三角测量解算生成点云数据,然后对获取的像片进行特征提取和影像匹配,从而完成地下巷道三维模型构建。具体数据处理流程如图1所示。
2.3 数据获取
本研究采用普通智能手机iphone8获取试验数据,由于在地下巷道环境中不具备良好的拍摄光线,因此拍摄时需要进行外部打光或打开闪光灯进行曝光补偿。进行地下巷道三维建模时,首先要拍摄足够多的像片,保证足够高的像片重叠率,由于地下巷道条件的特殊性,拍摄难度较大,需要做好曝光和补光准备;对于地面坑洼部位,需要进行往返拍摄,对于部分特殊部位,如垃圾堆放区以及拐角处,需要围绕这片区域进行覆盖式拍摄,保证这片区域具有足够高的照片重叠率。本研究一共拍摄了566张像片,像片重叠度大约为80%,部分像片如图2所示。

2.4 试验结果
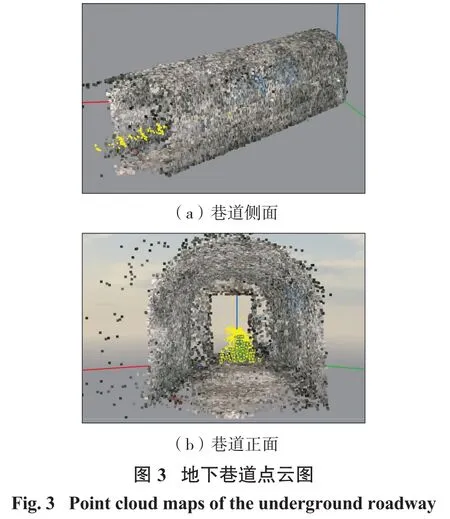
通过Context Capture软件对采集的影像数据进行处理后,经过空中三角测量(简称“空三”)解算生成了如图3所示的地下巷道密集点云数据。
空三解算完成后,需要对结果进行检查。在特征点的三维视图中检查是否有明显的分层或交叉现象,比照片有没有交叉、特征点在巷道壁与巷道底板交线有没有分层等。空三解算结果检查完毕后,进行巷道三维模型重建。建模之前需要设置相应的参数,如坐标系、建模范围,根据运行计算所需的计算机内存大小设置瓦片划分模式、瓦片大小等。最终构建的地下巷道三维模型如图4至图8所示。从图4中可以看出构建的巷道三维模型整体效果较好,纹理清晰,未发生较大的失真变形;图5展示了巷道内部的结构情景,除了巷道末端石门框边缘有小部分失真之外,其余大部分三维模型完整,纹理清晰;从图6、图7和图8可以进一步看出,本研究基于近景摄影测量技术构建的地下巷道三维模型结构完整,纹理清晰。




通过对河南理工大学老校区地下巷道进行三维建模试验,验证了采用近景摄影测量技术进行地下巷道三维模型的可行性。此外,通过试验发现利用普通智能手机获取像片同样可以实现高效建模,生成的地下巷道三维模型十分完好,纹理也十分清晰。

3 结 语
为实现地下巷道三维建模,采用低成本的普通手机获取巷道影像数据,通过采用CC软件对数据进行处理,构建地下巷道三维模型,纹理清晰,验证了基于近景摄影测量技术实现地下巷道三维建模的可行性。本研究获取像片并未采用数码相机,而是采用了普通智能手机来获取数字影像,试验结果证明,使用低成本手机获取的像片同样可以用于三维建模,有助于降低地下巷道三维建模的硬件成本。试验仅对地下一小段直巷道进行了建模研究,事实上,地下巷道之间还存在许多连接部位。因此,对于特殊情况下的巷道建模思路还需要结合实际情况进行进一步完善,从而提升巷道三维建模效果。