城市轨道交通行车安全系统动力学模型研究
2020-10-21薛亮刘小玲
薛亮 刘小玲

摘要:分析了城市轨道交通行车安全问题现状,提出了城市轨道交通行车系统安全风险因素。根据系统内各风险因素的相互关系,建立行车安全系统动力学模型。
关键词:城市轨道交通;行车安全;系统动力学;安全风险因素
1城市轨道交通行车安全
1.1城市轨道交通行车安全现状
近年来,随着国内各个城市的城市轨道交通线路运营里程不断增加,路网形态逐步形成,对行车工作中的安全问题研究尤为重要。虽然现阶段各个城市轨道交通运营企业在安全管理工作中已经取得了一定的经验,但是由于城市轨道交通行车系统是一个庞大而复杂的系统,涵盖的岗位、人员、设备、设施等因素众多,运行过程中的任何一个因素出现问题都有可能危及行车,发生安全事故。目前,有关城市轨道交通行车系统安全管理问题点研究大多為定性分析,还鲜少有学者从定量的角度去研究行车系统的安全问题,并以实际数据为支撑去验汪深入分析行车系统及其安全影响因素。
1.2城市轨道交通行车系统安全风险因素分析
城市轨道交通行车系统涉及到的场所主要是正线和场段,在正线上可能发生的安全风险因素有:轨行区顶棚漏水且温度低易造成接触网或轨面结冰,影响行车;轨行区施工人员或物资未出清导致侵限;部分滑动门之间存在缝隙且无法锁闭导致轨行区无法封闭;信号系统转辙机外锁闭故障;组织人员进出轨行区;错误、遗漏审核挂拆接地线位置;ATS、ISCS、FAS、SCADA、CCTV系统功能不完善;执行电话闭塞法列车定位时,未与全部司机确认列车位置;未撤除接地保护装置情况下送电;站台火灾时未及时扣停后续列车;跨线路施工,各线路行调未进行联控,未确认好线路空闲状况,接触网停送电状态,错误批准施工计划;车站站台特殊部位的铝合金踢脚线,松动脱落时可能发生侵限。在场段上可能发生的安全风险因素有:信号系统转辙机外锁闭故障;库内接触网隔离开关故障;错误操作TYJL-Ⅱ和应急盘;组织人员进出轨行区;错误、遗漏审核挂拆接地线位置;未撤除接地保护装置情况下送电。
2城市轨道交通行车安全系统动力学模型
系统动力学是一门基于系统论,吸取反馈理论与信息论等,并借助计算机模拟技术点交叉学科。它能定性与定量地分析研究系统,从系统点微观结构人手建模,构造系统的基本结构,进而模拟与分析系统的动态行为,适合研究各种系统动态发展问题。城市轨道交通行车安全系统风险涉及到正线和场段的人员及设备风险,从系统内各因素的相互关系出发,建立行车安全系统动力学模型。
2.1因果关系图
由图l可以看出,城市轨道交通行车安全系统之正线安全风险主要存在以下反馈环:
反馈环1:人员素质水平↓→正线人员风险↑→正线安全风险↑→城市轨道交通行车安全事故↑→人员素质水平↑
反馈环2:安全教育水平↓→正线人员风险↑→正线安全风险↑→城市轨道交通行车安全事故↑→安全教育水平↑
反馈环3:岗位工作水平↓→正线人员风险↑→正线安全风险↑→城市轨道交通行车安全事故↑→岗位工作水平↑
反馈环4:设备安全防护水平↓→正线设备故障↑→正线安全风险↑→城市轨道交通行车安全事故↑→设备安全防护水平↑
反馈环5:设备维修维护水平↓→正线设备故障↑→正线安全风险↑→城市轨道交通行车安全事故↑→设备维修维护水平↑
反馈环6:设备更新创新水平↓→设备维修维护水平↓→正线设备故障↑→正线安全风险↑→城市轨道交通行车安全事故↑→设备更新创新水平↑
反馈环7:设备更新创新水平↓→设备安全防护水平↓→正线设备故障↑→正线安全风险↑→城市轨道交通行车安全事故↑→设备更新创新水平↑
场段安全风险主要存在的反馈环与正线安全风险同理,此处不再详述。
2.2建立系统的SD模型
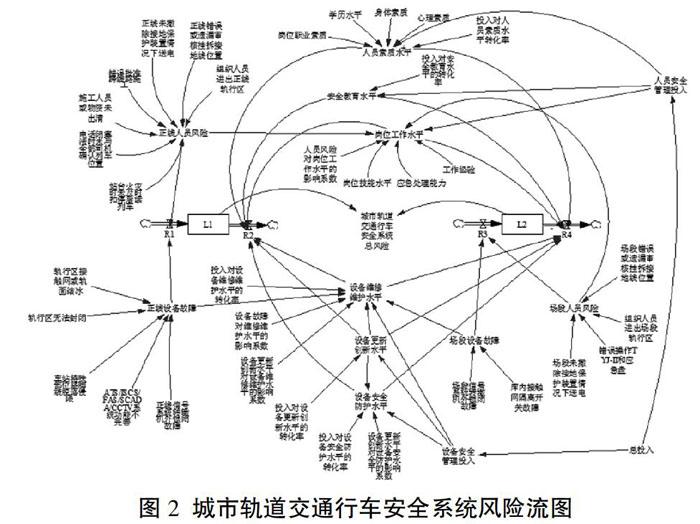
根据系统内各因素因果关系的分析,确定系统的流率、流位、辅助变量等,构建城市轨道交通行车安全系统风险水平的流图,如图2所示。
图2中,Ll、L2为水平变量——表示行车安全正线、场段风险水平高低的指标,无量纲;
Rl、R2为速率变量——表示单位时间内正线风险水平的增加量、减少量;
R3、R4为速率变量——表示单位时间内场段风险水平的增加量、减少量;
其余的为辅助变量和常量。
2.3系统动力学方程
根据系统动力学原理,系统风险水平计算方法如下:
(1)系统总体风险。
城市轨道交通行车安全系统总体风险:L=Ll-K×Q+k-K×Q
式中,L表示总体风险水平;L1表示正线系统风险水平;L2表示场段系统风险水平;Q表示相应的权重(本文所涉及到的所有权重是结合案例运营公司记录资料,利用专家咨询、数据收集、数学的权重确定方法而得到的)。
(2)正线系统风险水平。
L1*-K=Ll-J+DTx (RI-JK-R2-JK)
式中,L1*K表示正线系统风险水平K时的值;L1*J表示正线系统风险水平J时的值;DT表示单位时间步长;Rl -JK表示J到K间的流量增加量;R2 *JK表示J到K间的流量减少量。
Rl=正线人员风险×Q+正线设备故障×Q
正线人员风险=站台火灾时为及时扣停后续列车×Q+电话闭塞法时未与全部司机确认列车位置×Q+施T人员或物质未出清×Q+错误批准跨线路施T×Q+正线未撤除接地保护装置情况下送电×Q+错误、遗漏审核挂拆接地线位置×Q+组织人员进出正线轨行区×O
正线设备故障=轨行区接触网或轨面结冰×Q+轨行区无法封闭×Q+车站特殊部位踢脚线脱落侵限×Q+ATS/ISCS/FAS/SCA-DA/CCTV系统功能不完善×Q+信号系统转辙机外锁闭故障×QR2=人员素质水平×Q+安全教育水平×Q+岗位T作水平×Q+设备维修维护水平×Q+设备更新创新水平×Q+设备安全防护水平×Q
人员素质水平=岗位职业素质×Q+学历水平×Q+身体素质×Q+心理素质×Q+人员安全管理投入×投入对人员素质水平的转化率 安全教育水平=投入对安全教育水平的转化率×人员安全管理投入
岗位工作水平=岗位技能水平×Q+应急处理能力×Q+工作经验×Q-正线人员风险对岗位工作水平的影响系数×正线人员风险
设备维修维护水平=投入对设备维修维护水平的转化率×设备安全管理投入+设备更新创新水平对设备维修维护水平的影响系数×设备更新创新水平一设备故障对维修维护水平的影响系数×正线设备故障
设备更新创新水平=投入对设备更新创新水平的转化率×设备安全管理投入
设备安全防护水平=投入对设备安全防护水平的转化率×设备安全管理投入+设备更新创新水平对设备安全防护水平的影响系数×设备更新创新水平
场段系统风险水平计算方法与正线系统风险水平同理,此处不再详述。
3结束语
城市轨道交通行车安全系统作为整个轨道交通运营系统中的重要组成部分,它关系着每日的正常安全运营。本文所建立的行车安全系统动力学模型将会给同行研究者和运营企业在今后做安全管理问题研究时提供一个可参考的依据,使城市轨道交通在公共交通事业中发挥更加安全可靠的作用。
参考文献
[1]何南.城市客运交通需求的系统动力学预测与分析[J].武汉理工大学学报(交通科学与工程版),2017,8:569-574.
[2]谢婷,刘景矿,庞永师.基于系统动力学的城市轨道交通PPP项目风险影响因素研究[J].现代城市轨道交通,2018,08:77-82.
[3]喻夏.基于系统动力学的地铁行车安全管理研究[D].西南交通大学,2017.
