旋翼无人机的模糊控制避障策略
2020-10-21黄静洋潘卫军付小蓉李瑞
黄静洋 潘卫军 付小蓉 李瑞


摘 要: 由于无人机的小巧方便,功能多样,应用广泛,目前是空中交通领域的热点。当前大部分无人机为旋转翼无人机,在灵活性和动力上都有良好的性能。在无人机领域,自主避障能力是其智能化的主要体现之一。本文分析了无人机的自主避障系统的结构,采用基于模糊逻辑的自主避障算法使旋转翼无人机在路径上自主绕飞障碍物,该算法简单易行,成本较低,可以在一定程度上容纳传感器误差。本文将此算法在matlab中建立了避障关系曲面图,并在c语言环境中建立了无人机路径,在该路径中进行避障仿真,结果验证了该算法的可行性和有效性。
关键词: 无人机;旋转翼;避障;模糊逻辑
【中图分类号】V249 【文献标识码】A 【文章编号】1674-3733(2020)08-0198-03
由于无人机经济性较高,节约人力,机动性好,旋转翼无人机在民用和军事上都有广泛运用[1],因此对于旋翼机飞行的安全性和完成任务的可靠性要求也更高。比如,无人旋翼机对于地形复杂、地点偏远的地区环境的防护有重要意义[2];对于人员难以进行的勘察研究,无人旋翼机可以帮助勘探人员对此进行勘测并带回数据[3];无人旋翼机在战场环境中对于避开敌方导弹、预警机等障碍物,减少人员伤亡方面有实际意义[4]。无人旋翼机不仅在这些方面有广泛应用前景,在其他领域也有很大市场[5,6]。而对于无人旋翼机而言,自主避障系统是无人机顺利完成飞行任务的重要安全保障。近年来,无人机的自主避障系统已经成为研究热点之一。自主避障系统在很大程度上反映了无人机的智能性和安全性,无人机需要可靠、实用、反应快速的自主避障系统,自主安全避开路径中的障碍物并快速提供新的飞行路径,及时将新的飞行路径数据传送至飞行控制器中,保证无人机顺利完成飞行任务。
在旋翼机自主避障系统的开发方面,早在2006年3月,SAGEM防务安全公司就获得了欧洲防务局授权,开展了关于“感知和规避技术”的研究。2007年,美国国防高级研究计划局开发了一种小型光感规避系统[7],并在Shadow200B、“全球鹰”和“捕食者”无人机上试验。G.Hoffmann等提出了避障系统的三种操作模式[8]:搜索模式(检测)、认知模式(探测和跟踪)、避障模式(机动)。Zhihai He、Ram Venkataraman Iyer等提出了基于视觉的无人机避障方法[9],通过主板上的摄像头获得视频数据来确定场景中对象的范围,并由视觉信息校正角速度,进行飞行控制。
目前我国的无人机自主飞行避障技术研究也在朝着智能化、可靠性、实时性以及实用性等多元化发展。刘小伟、杨秀霞提出了基于比例导引律的无人机避障研究[10],可顺利追踪静止及运动目标。基于人工势场法的无人机避障策略,利用势场思想,将路径中的节点看作是对无人机有引力或斥力的点,目标点及目标节点为引力,障碍物边缘点为斥力,但该策略容易陷入局部最優,由此也产生了一些改进的人工势场算法[11,12]。近年来也产生了一些人工智能算法,比如A*算法[13]、蚁群算法[14,15]、遗传算法[16,17]和粒子群算法[18,19]等以及它们的改进算法。这些算法有些针对性较强,比如A*算法,但环境变化时需要重新装载地图,有些全局性不够强,有些算法速度较快,根据不同的场合不同的飞行任务,可以选择不同的避障策略。
1 旋翼无人机自主避障控制系统
旋翼无人机的自主避障系统通常包含如下四个部分:前端采集模块、中央处理模块、控制执行模块和被控对象,如图1。系统通过前端采集模块获取环境信息和自身姿态、位置信息,包括环境中的障碍物信息;然后传送至中央处理模块,由中央处理模块根据障碍物信息和避障算法,给出避障控制信息;执行机构将此控制信息转化为行驶对象的避障动作,即调整特定的电机转速,保障被控对象在从起始点到目标点的行驶过程中,能安全地绕过障碍物。
前端采集模块是无人机自主避障系统的一个重要组成部分,获取的信息量越丰富,精度越高,对提高无人机的避障能力就越有利,同时也需要处理信息速度较快,以提高信息处理的实时性。在目前的采集模块中,可以使用激光、红外传感器、超声波传感器、摄像头、多传感器融合等方式。
中央处理模块是自主避障系统的核心,根据无人机系统采集到的机体信息和避障系统采集到的障碍物信息,通过自主避障算法给出合理的避障动作指令,传递到控制执行模块,使无人机在进行避障后继续向目标点飞行,完成飞行任务。
旋翼无人机的控制执行模块由旋转翼电机组成,在接收到中央处理模块传递的控制信息后,改变几个电机的转速,以改变无人机的航向角、俯仰角和滚转角,以及角速度和角加速度。旋翼无人机与固定翼无人机飞行的空气动力学原理是一样的,利用空气的流速导致静压不同,使得飞机上升高度。但是与固定翼飞机不同的是,旋翼无人机的机翼速度远大于机身速度,机翼电机的不同转速可以控制无人机的速度,而不同的电机执行不同的速度可以控制无人机的方向。
2 基于模糊逻辑的避障算法
通常来说,对于执行机构,应输入确定的控制量,也就是中央处理模块应根据其输入量输出确定的输出量。模糊控制的思想是,对于确定的输入量,以模糊的语言进行描述,根据一定的逻辑规则,输出模糊的输出语言,再将模糊的输出语言转换为确定的输出量,继而控制执行模块。对于本文中的旋翼无人机而言,中央处理器的输入为无人机的位置、速度,以及距目标点或障碍物的距离,这些均为确定的数值,在模糊控制算法中,将这些输入量模糊化,比如“大”“较大”“较小”“小”等语言,这种语言类似于人的思维。再设置一定的输入输出关系规则,再将输出量化,就可以得到具体的输出量。
由于无人机在避障后需要及时回到预设航线上,如果是没有规定航线的无人机任务,就需要在避障后重新计算出新的路径,这种寻找目标点的模式称为寻踪模式。在巡航阶段中探测到障碍物时,需要无人机及时避开障碍物,对于执行简单任务的旋翼无人机来说,受空中交通管制限制较小,能获得的其他航空器信息也较少,如果改变高度会增加相撞风险,而改变方向更为容易,故在避障模式下不改变旋翼无人机高度,只改变其方向。当无人机传感器没有探测到有相撞风险的障碍物时,无人机处于寻踪模式,当探测到某障碍物存在相撞风险时,无人机切换到避障模式,确认已无相撞危险后即切换回寻踪模式。
2.1 建立坐标系及输入量输出量的选取
根据上述分析,无人机在到达巡航阶段后,不再随意改变巡航高度,因此需要建立一个二维坐标系。该坐标系为机体坐标系或地磁坐标系,只需获得机体距目标点和障碍物的距离及位置关系即可。如图2所示,XOY为本文建立的二维参考坐标系,将机体看作一个质点,(x(t),y(t))为当前机体在坐标系中的位置,v(t)为机体的速度方向,d(t)为机体距目标点的距离,(t)为机体当前飞行方向与目标点方向的夹角。由于障碍物可能在机体正面或侧面,故设do(t)为机体距正面障碍物外形最近点的距离。
在空中交通管理中,需要考虑航空器之间的纵向间隔和侧向间隔。对于低空飞行的旋翼无人机来说,当与障碍物不具有安全的垂直间隔(即高度上的间隔)时,也需要考虑航空器与障碍物之间的纵向间隔(即障碍物在航空器前方的飞行路径上)和侧向间隔(即障碍物在航空器的侧面)。因此在避障模式下,旋翼无人机距前方障碍物的距离do(t)和距侧方障碍物的距离dos(t)均为该策略的输入量,在这里设障碍物在机体左面时dos(t)为正,障碍物在机体右面时dos(t)为负,θ(t)为转向角,同样左转为正,右转为负,则输出量为θ(t)。避障结束后切换为寻踪模式,此时输入量为机体距目标点的距离d(t),以及当前飞行方向与目标点方向的夹角(t),输出量仍为转向角θ(t)。
2.2 输入量和输出量的模糊化
在本文的策略中,需要用模糊化的语言描述输入量和输出量。在避障模式中,机体距障碍物的距离不能等于零,所以先将输入量ds和df在区间内用模糊语言描述为do={小,中,大}={S,M,L},dos={右大,右小,零,左小,左大}={RL,RS,ZE,LS,LL},其中dos={零}表示左右均无障碍物。输出量θ在区间内用模糊语言描述为θ={右大,右中,右小,零,左小,左中,左大}={RL,RM,RS,ZE,LS,LM,LL},以此表示机体需要转向角度的大小。
在寻踪模式下,输入量的模糊化为d={零,小,中,大}={ZE,S,M,L},={负大,负中,负小,零,正小,正中,正大}={NL,NM,NS,ZE,PS,PM,PL}。其中的模糊语言表示的是{目标点在机体右侧且夹角大,目标点在机体右侧且夹角中等,目标点在机体右侧且夹角小,目标点在机体正前方,目标点在机体左侧且夹角小,目标点在机体左侧且夹角中等,目标点在机体左侧且夹角大}。输出量θ的模糊化与其在避障模式中的一致。
模糊语言的隶属度函数需要根据经验和传感器的范围设置,具体的应用场景不同,隶属度函数也不同。如果需要灵敏度和分辨率较高,隶属度函数的曲线需要设置得较陡;如果需要稳定性较高,隶属度函数曲线需要设置得较平缓。在设置隶属度函数时应选择合适的范围和函数曲线。
2.3 模糊控制规则设计和输出量具体化
在将输入量和输出量模糊化后,应设计合理的控制规则。通常来说,控制规则一般由条件语句组成,在本文中根据上述输入量和输出量的选取可知,此例为双输入单输出的控制系统。假设输入为x和y,输出为z,条件规则语句为“x为Ai,y为Bi,则z为Ci(i=1,2,3……)”,该规则库由n条这样的规则语句组成。在模糊控制中,n不宜过大,否则随着n的增长,计算量会呈几何级数增长。
根据模糊规则得到的输出量Ci是一种模糊语言,在对执行机构进行控制时需要的是具体的数值,因此需要将输出具体化。在对输出具体化的过程中可以采用最大隶属度法、中位数法和加权平均法。本文才用的是加权平均法,设μc(z)为输出隶属度函数,取z的加权平均值为具体值。
3 旋翼无人机的模糊控制避障算法仿真
3.1 模糊逻辑控制器的设计
根据第2部分的叙述,在本例中,避障模式中,输入do和dos的区间分别设为[0,2]和[-2,2],单位为百米。寻踪模式中,输入d和的区间分别设为[0,10]和[-180,180],单位分别为千米和度。输出量θ的区间分别设为[-30,30],单位为度,即旋翼无人机的转向角最大为30°,方向的每次最大改变量为30。
本文假设此任务的特点为短距离、低高度、稳定性要求较高,例如快递无人机。根据此任务特点以及一定的经验和计算,机体距前方障碍物的距离do的隶属度函数和机体距侧方障碍物的距离dos的隶属度函数分别如图3图4所示。
输出量转向角θ的隶属度函数如图5所示
在寻踪模式下,输入量旋翼无人机距目标点的距离d的隶属度函数如图6,当前飞行方向与目标点方向夹角的隶属度函数如图7所示。输出量的隶属度函数同避障模式,如图5。
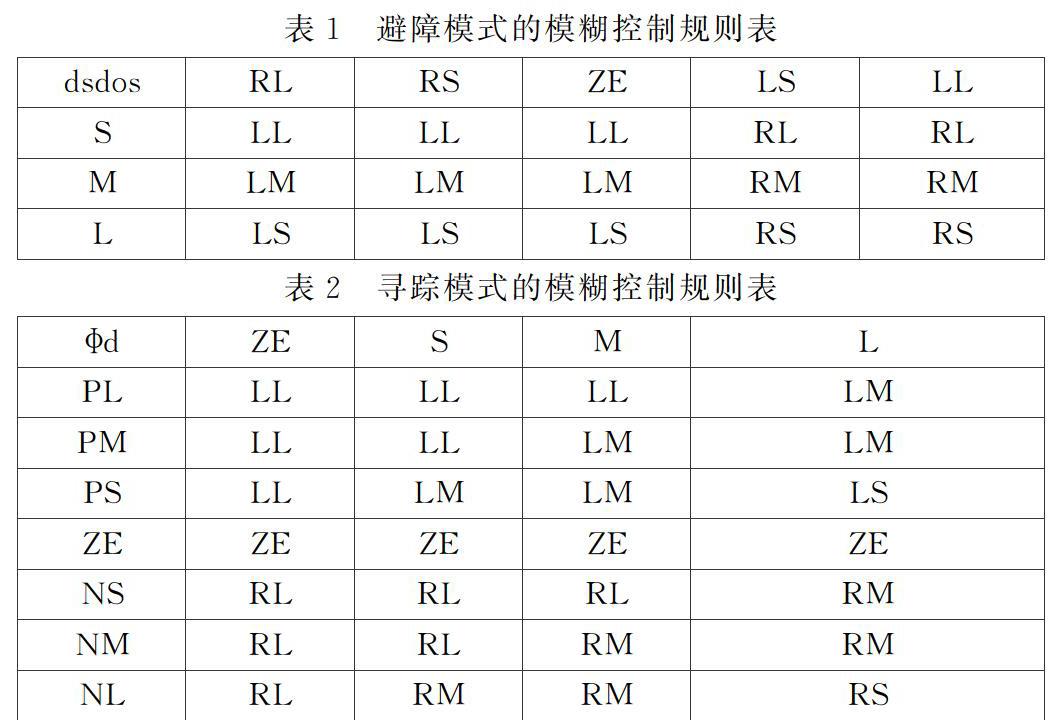
在设置了隶属度函数后,根据模糊逻辑控制器的性能,需设置模糊逻辑规则。避障模式下的模糊控制规则如表1所示,寻踪模式下的模糊控制规则如表2所示。
3.2 仿真结果
根据建立的避障模糊控制器,得到的仿真结果输入输出关系曲面图如图8所示。可以看出,当dos<0时,θ>0,而且在0 根据建立的寻踪模糊控制器,得到的仿真结果输入输出关系曲面图如图9所示。可以看出,以>0(即目标点在飞机飞行左侧)为例,当0<≤60时,随着的增大,输出转向角θ也随之增大,在d较小时增长坡度较大,在d较大时坡度较缓,说明当飞行方向和目标点方向夹角较小时,如果距离较远则飞机的转向角也较小,如果距离较近则转向角相对大一些,且都随夹角而变化;当60<≤110时,转向角θ基本保持不变,在0 本文根据模糊逻辑控制的原理编写了C语言程序,建立坐标系,设置机体的起始坐标为(2,2),目标点坐标为(6,6),障碍物边缘最近点坐标为(3,3.5),步长为1,初始飞行方向与x轴夹角为20°,观察机体在寻找目标点时的路径过程。通过路径坐标点进行仿真结果分析,在飞机到达位置(3.73,2.99)后,遇到障碍物从而进入避障模式,此时的转向角为0°,而如果没有障碍物此时的转向角应为6.5°。说明此时飞机为避开障碍物只能向正前方飞行,而不能朝向目标点飞行,在避开障碍物后,继续向目标点飞行,最终到达位置(6.63,5.37),该位置坐标与目标点坐标的误差小于一个步长。 4 结论 引入模糊控制理论对旋翼无人机进行避障路径规划,模糊化的语言可以在一定程度上容纳由传感器数据导致的误差。本文根据模糊控制算法,建立了二维坐标系,设置了避障模式和寻踪模式,航空器的巡航阶段在两个模式之间切换。可以根据旋翼无人机的任务性质设置相应的隶属度函数和模糊逻辑规则,在本文仿真案例中,假设无人机的任务要求飞行平稳性较高,飞行距离较短,高度较低。通过输入输出关系曲面图可以看出,飞行的转向较为平缓,通过路径仿真可以得知,此方法可以帮助无人机在飞行路径中避开障碍物并到达目标点附近。此方法适用于规则数量较小,对速度要求不高的低空小航线的无人机飞行任务。 参考文献 [1] 金大鹏. 四旋翼无人飞行器控制器的设计与实现[D].沈阳:东北大学,2010. [2] Emanuel Stingu and Frank L. Lewis. A Hardware Platform for Research in Helicopter UAV Control[J]. Unmanned Aircraft Systems, 2009. [3] 张劲锐.基于GIS的无人机地面测控系统设计与实现[J].弹箭与制导学报,2008,05. [4] 唐亮,徐庆九. 海军倾转旋翼无人机技术和发展优势综述[J].科技资讯,2012,28:73-74+76. [5] 王波.无人机飞行状态对数据传输的影响研究[J].舰船电子工程,2008,10. [6] 赵莹.下一代无人机研发中的关键技术[J].飞航导弹,2008,10. [7] 徐华东.无人机电力巡线智能避障方法研究[D].南京:南京航空航天大学,2014. [8] G. Hoffmann, H. Huang, S. Waslander, et al. Quadrotor helicopter flight dynamics and control: Theory and experiment[C]. South Carolina: AIAA Guidance, Navigation and Conference and Exhibit, 2007. [9] He Z, Iyer R V, Chandler P R. Vision-based UAV flight control and obstacle avoidance[C]. American Control Conference, IEEE, 2006. [10] 刘小伟,杨秀霞.基于比例导引律的无人机避障研究[J].计算机仿真,2015. [11] 毛晨悦, 吴鹏勇. 基于人工势场法的无人机路径规划避障算法[J]. 电子科技, 2019(7). [12] 丁家如, 杜昌平, 赵耀, et al. 基于改进人工势场法的无人机路径规划算法[J].计算机应用, 2016(1):287-290. [13]吴剑, 喻玉华, 周继强, 黄一敏. 无人机航路规划中的变步长A*算法[J]. 电光与控制, 2011, 18(05):1-6+10. [14] Wen Y E , Deng-Wu M A , Fan H D . Algorithm for Low Altitude Penetration Aircraft Path Planning with Improved Ant Colony Algorithm[J]. Chinese Journal of Aeronautics, 2005, 18(4):304-309. [15] 唐立, 郝鹏, 张学军. 基于改进蚁群算法的山区无人机路径规划方法[J]. 交通运输系统工程与信息, 2019, 19(1):158-164. [16] 鱼佳欣, 周春来, 刘东平. 改进遗传算法的无人机航路规划与仿真[J]. 计算机仿真, 2013(12):23-26. [17] 李楠, 刘朋, 邓人博, et al. 基于改进遗传算法的无人机三维航路规划[J]. 计算机仿真, 2017, 34(12). [18] 张航, 刘梓溪. 基于量子行为粒子群算法的微型飞行器三维路径规划[J]. 中南大学学报(自然科学版), 2013(S2):58-62. [19] 于鸿达, 王从庆, 贾峰, et al. 一种基于差分进化混合粒子群算法的多無人机航迹规划[J]. 电光与控制, 2018, v.25;No.239(05):26-29.
