履带式钻杆吊装车总体方案设计及性能参数确定
2020-10-20王杰
王 杰
1中煤科工集团重庆研究院有限公司 重庆 400039
2瓦斯灾害监控与应急技术国家重点实验室 重庆 400037
目 前,煤矿井下瓦斯抽放钻孔多为巷道内近水平钻孔施工,在加接钻杆时,主要采用人工搬运、举升和手拧对中的传统方式,不仅劳动强度高、操作效率低,而且对人员的人身安全存在着较大的风险。随着近几年来“煤矿井下顶板高位大直径定向钻孔”工艺的兴起,瓦斯抽采钻孔的直径越来越大,施工钻具的质量和尺寸都相应增加,传统的人工加接钻杆方式将需要更多的人力和辅助工具,无法满足高效钻孔的要求。相比地面竖直钻进工程,由于井下钻场作业空间受限、煤矿特殊环境要求和施工方式的不同,无法采用钻机随车配备卷扬机的方案,其他轻小型起重设备也较难满足井下瓦斯抽采钻孔施工工艺的要求。因此,亟需研制一种能够适应井下钻孔要求的钻杆吊装车,实现从钻杆堆放区到钻机施工处的短距离钻杆搬运和上钻“定位”功能,仅需人工辅助即可完成上下钻杆的操作流程,解决大直径钻杆加接困难的问题。
1 设计要求
煤矿井下大直径定向钻机由于外形尺寸较大,施工过程中所需辅助设备及钻杆数量较多,在布置钻场时,一般将钻杆摆放在距离主机 10~30 m 的地方,因此钻杆吊装车需要具有独立行走和装载钻杆的功能,且装载钻杆的数量能够满足 1 个作业班组的施工需求。为了能抓取钻杆并起吊到钻杆车或钻机上的搓杆机构中,需具有辅助起吊及钻杆定位的功能,钻杆可以在起吊空间任意位置随遇平衡,满足定位的需求。
2 总体结构方案设计
履带式钻杆吊装车在结构设计上采用模块化的设计方法,将各个功能部件布置在履带行走底盘上,具有结构紧凑、功能多样、便于维修的特点。
2.1 总体方案布局
钻杆吊装车由履带底盘、液压平衡吊、钻杆吊具、液压泵站、电控柜和操纵台等部件组成,整体结构布局如图 1 所示。钻杆按照分层摆放的形式固定在车体一侧,每层及每根钻杆之间都留有间隙,便于吊具抓放钻杆。通过更换钻杆卡座,可以摆放不同规格和数量的钻杆,最大装载钻杆长度为 3 m,最多可装载 16 根直径 127 mm 的定向钻杆。履带车搬运钻杆过程中,由卡座两侧的拉杆螺母锁紧钻杆,防止窜动。起吊时由铰接在液压平衡吊末端的钻杆吊具锁紧钻杆,平衡吊具有水平、竖直和回转 3 种运动方式,可将钻杆“定位”到工作空间的任一位置,满足钻机上、下钻杆的工艺需求。

图1 钻杆吊装车结构Fig.1 Structure of drill pipe lifting truck
2.2 履带底盘
履带底盘由履带总成、行走马达、机架和锚固液压缸等组成,结构如图 2 所示。左右对称的 2 套行走履带与机架刚性连接,由液压系统驱动车体前进、后退和转弯,具有接地比压低、转弯半径小、通过能力强的特点。在履带车体前、后侧分别安装了 2 只锚固液压缸,用于起吊作业时车体的稳固和调平。
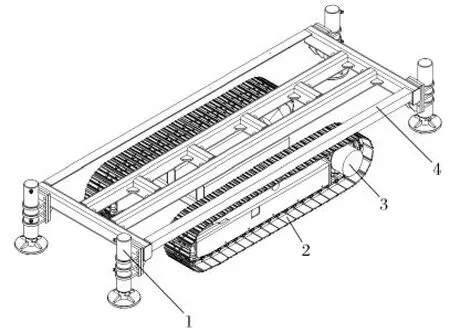
图2 履带行走机构结构Fig.2 Structure of crawler walking mechanism
2.3 液压平衡吊
液压平衡吊是一种采用液压驱动的机械式平衡吊,由平行四边形杆系、头架、配重、固定立柱和驱动液压缸组成,结构如图 3 所示,运用平形四边形的缩放原理和杆系的平衡原理,实现了空间内任一点的随遇平衡。工作时,平衡吊的水平运动和回转运动由手动控制,仅需操作者施加几千克的辅助力,升降运动由驱动液压缸控制,具有省力高效、操作方便的特点。
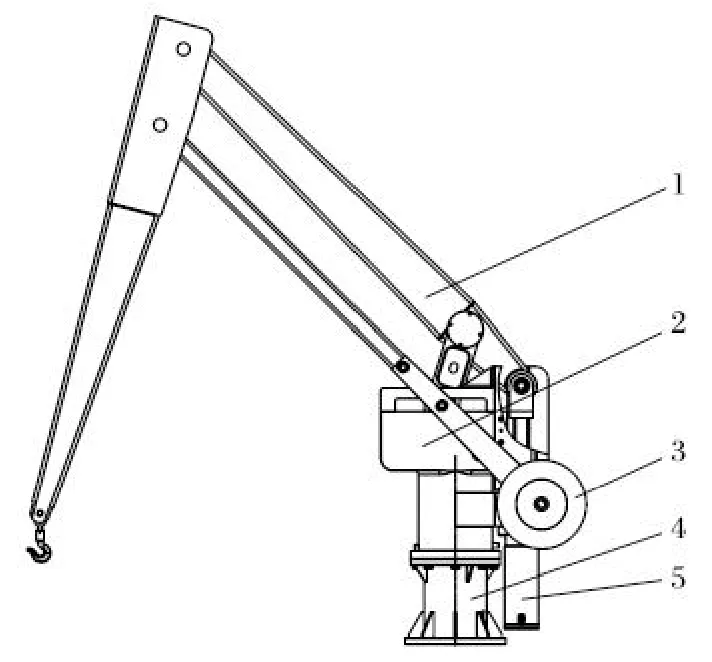
图3 液压平衡吊结构Fig.3 Structure of hydraulic balance crane
2.4 钻杆吊具
钻杆吊具用于抓取钻杆,由横梁、两组 X 形抓手、卡瓦和螺旋锁定机构等组成,结构如图 4 所示。顺时针转动螺旋机构,X 形抓手上部收紧,下部夹紧钻杆,逆时针转动螺旋机构则松开钻杆,能够满足直径 89~127 mm 范围内的多种规格钻杆的夹紧需求。每个抓手上安装有 4 片卡瓦,可增加抓手与钻杆壁之间的摩擦力,防止钻杆滑落。吊具与平衡吊吊钩铰接连接,可有效扩展钻杆的活动范围。
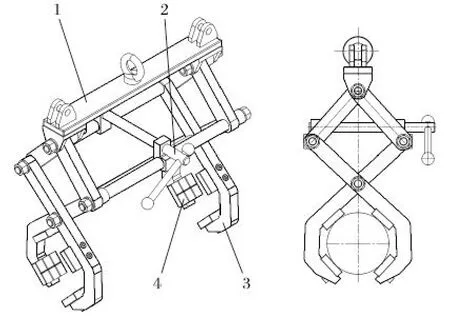
图4 钻杆吊具结构Fig.4 Structure of drill pipe lifter
3 液压系统方案设计
钻杆吊装车为间歇性工作方式,时间间隔在 30~120 min 之间,工作频率较低。从经济性方面考虑,采用定量泵开式液压系统,包括行走锚固系统和起吊系统两大部分,操作方式为液压先导操作,液压原理如图 5 所示。
其中,主多路阀 3 为 4 片式液控换向阀,第 1 联控制液压平衡吊升降液压缸 5 的伸出或收回,第 2、3 联分别控制履带车左、右侧行走马达 6.1 和 6.2 前进和后退,第 4 联为锚固液压缸 8 提供工作油源。先导油源阀 2 串联在定量泵 1 的出口,为先导手柄 7 提供控制油源。功能选择阀 10 为两位四通换向阀,用于行走锚固和起吊功能的切换,置于前位时,先导手柄 7.1 可以工作,控制起吊系统正常工作;置于后位时,行走手柄 7.2 和 7.3 可以工作,同时,先导油路控制主多路阀的第 4 联换向,为锚固多路阀 9 提供压力油。锚固多路阀 9 分别控制 4 根锚固液压缸的伸出与收回,液压缸上安装有液压锁用于回路保压。调速阀 4 安装在升降液压缸的有杆腔上,通过调节节流口的开度可以控制液压缸伸出和收回速度,液控单向阀用于防止重物下落。
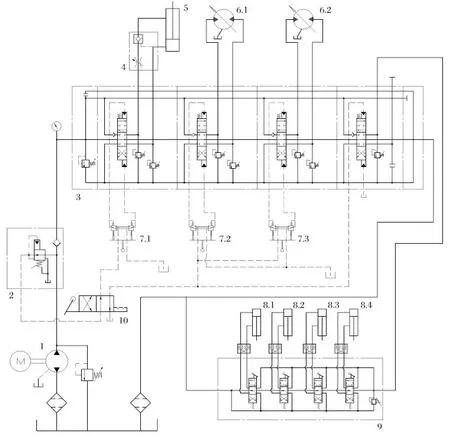
图5 钻杆吊装车液压系统Fig.5 Hydraulic system of drill pipe lifting truck
4 主要技术参数确定及选型计算
4.1 技术参数的确定
履带式钻杆吊装车的技术参数应能满足钻机上下钻杆的工艺需求,其载质量由机身自身质量和最大钻杆数确定,行走速度和爬坡能力与钻机参数相适应,平衡吊的工作范围和技术参数由上下钻杆时的空间要求确定,各项主要技术参数如表 1 所列。
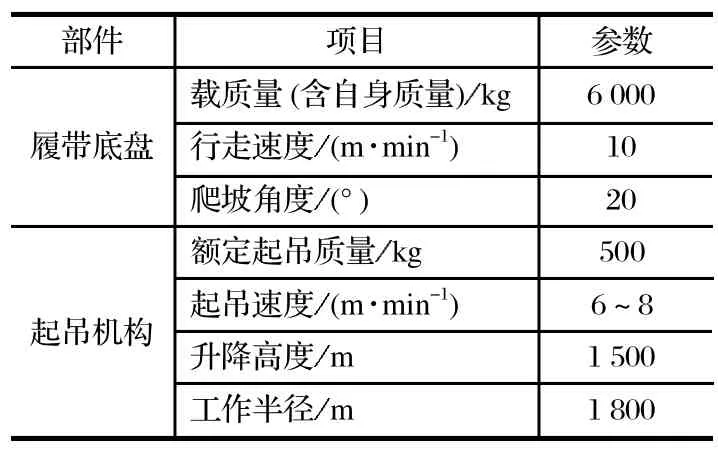
表1 履带式钻杆吊装车主要技术参数Tab.1 Main technical parameters of crawler drill pipe lifting truck
4.2 履带行走系统参数计算
行走系统的参数计算的依据主要是履带的牵引力,包括行走马达排量、转速和系统流量的计算。而计算牵引力需要考虑履带行走过程中的各种阻力系数,比较繁琐,此处计算主要考虑坡道滚动阻力、回转阻力和爬坡阻力,则所需牵引力[1]

式中:f为滚动阻力系数,取f=0.1;为回转阻力系数,取为爬坡阻力系数,取=20°;m为履带车总质量,m=6 000 kg。
由牵引力计算马达驱动转矩,然后得到所需行走马达的当量排量
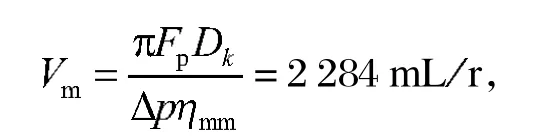
式中:Dk为驱动轮齿节圆直径;Δp为马达工作压差;为马达机械效率。
由履带行走速度可计算驱动轮转速
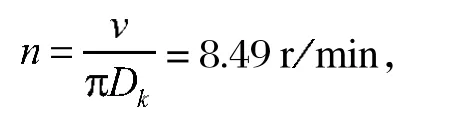
式中:v为履带行走速度。
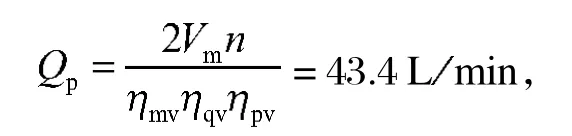
由驱动轮转速和马达当量排量计算所需液压泵的流量
4.3 起吊系统参数计算
起吊系统计算主要是计算平衡吊驱动液压缸参数。为了确定液压缸工作面积及所需流量,需要计算液压缸的输出力及位移。液压平衡吊的机构运动原理如图 6 所示,A为平衡吊的吊钩位置;D为活动支点,只能沿x方向运动,J为与液压缸连接的铰接点,受液压缸控制只能沿y方向运动,在受力分析时为固定支点。A和A′组成的阴影区域为平衡吊在xy平面内的工作范围。

图6 液压平衡吊机构简图Fig.6 Sketch of hydraulic balance crane mechanism
根据平衡吊平行四边形杆系的受力分析结果,为了实现杆系平衡,需满足=k,k为平衡吊的放大系数,一般取k=5~10。由相似三角形原理可以得出A点的位移及受力计算公式[2-3]
式中:sx为A点的水平位移;sy为A点的垂直位移;GA为吊点A处的重物重力;FJ为液压缸的J点处的拉力。
根据技术参数,确定液压缸的工作压力p=5 MPa,杆系放大系数取k=6,则驱动液压缸有杆腔的工作力FJ、速度vJ和行程sJ分别为
5 结语
煤矿井下履带式钻杆吊装车采用履带行走机构解决了多根钻杆的搬运和存放问题,利用液压平衡吊实现了钻杆的起吊和空间定位,能够满足“顶板高位大直径”钻孔过程中辅助上下钻杆的使用要求,为钻机上下钻杆提供了一种新的设计思路。按照该思路设计的吊装车,相比传统的“肩扛手拧”加接钻杆方式,具有高效、省力、操作便捷的特点,同时,有效降低了工人劳动强度,具有广阔的应用前景。
