适用于智能机械手的Galfenol悬臂梁式力传感器设计
2020-10-19赵智忠王春雷王博文
赵智忠,王春雷,王博文
(河北工业大学,省部共建电工装备可靠性与智能化国家重点实验室,河北省电磁场与电器可靠性重点实验室,天津 300130)
0 引言
近些年来,智能机械手广泛用于工业生产与日常生活中,如汽车工业智能机械手、核工业智能机械手与家庭智能机器人。在面对环境中的不确定性因素,为保证智能机械手与目标物体的安全,需要为智能机械手装配具有指尖信息感知能力的传感器,来辅助机械手可靠、灵巧地的完成预定的任务[1]。文献[2]为高度欠驱动的新型机械手装配了位置和触觉传感器,提供精确的角度反馈和二元力反馈,弥补可控性自由度不足的问题。文献[3]提出了一种适用于智能机械手的传感系统,通过机械手抓取物体,使传感系统获得与压力和刚度相应的信息,实现对外界环境与材料特性的探索。在复杂的操作环境下,为提高智能机械手抓握目标物体的可靠性,需要为机械手安装接触力传感器,来实时反馈指间受力信息。适用于智能机械手的力传感器主要类型包括有压电式(石英、压电陶瓷、聚偏氟乙烯)[4]、压阻式(导电橡胶和压敏陶瓷)[5-6]、电容式[7-8]与光学式[9]。压电式力传感器具有稳定性好、结构简单等优点,但无法测量静态载荷[10]。电容式力传感器具频率响应好、空间分辨率大等优点,但杂质和其他污染物可能会引起介电常数的变化,影响传感器的性能[11-12]。以导电橡胶为敏感材料制成的电阻式压力传感器在低压力范围内,存在输出信号滞后与灵敏度低等问题[13]。为克服以上类型力传感器的不足,本文以新型磁致伸缩材料铁镓合金(Galfenol)为敏感材料设计了悬臂梁结构力传感器,应用于智能机械手接触力检测。
基于铁镓合金磁致伸缩逆效应,设计了力传感器的结构。结合霍尔效应、铁镓合金磁化模型与欧拉-伯努利梁理论,推导了力传感器输出模型。搭建了实验平台,研究了偏置磁场对力传感器输出特性的影响,并验证了输出模型。为模拟智能机械手抓握过程的受力情况,采用线性电机对力传感器进行动态测试。由于受铁镓合金磁滞效应的影响,力传感器动态输出受谐波干扰的影响较大,且谐波误差随着施力频率的增加而逐渐增大。为满足智能机械手对动态力信号精确测量的需要,基于巴特沃斯低通滤波原理,设计了力传感器低通数字滤波系统。将滤波算法与力传感器输出模型嵌入单片机STM32中,完成对力信号的数字滤波与计算。
1 力传感器结构与工作原理
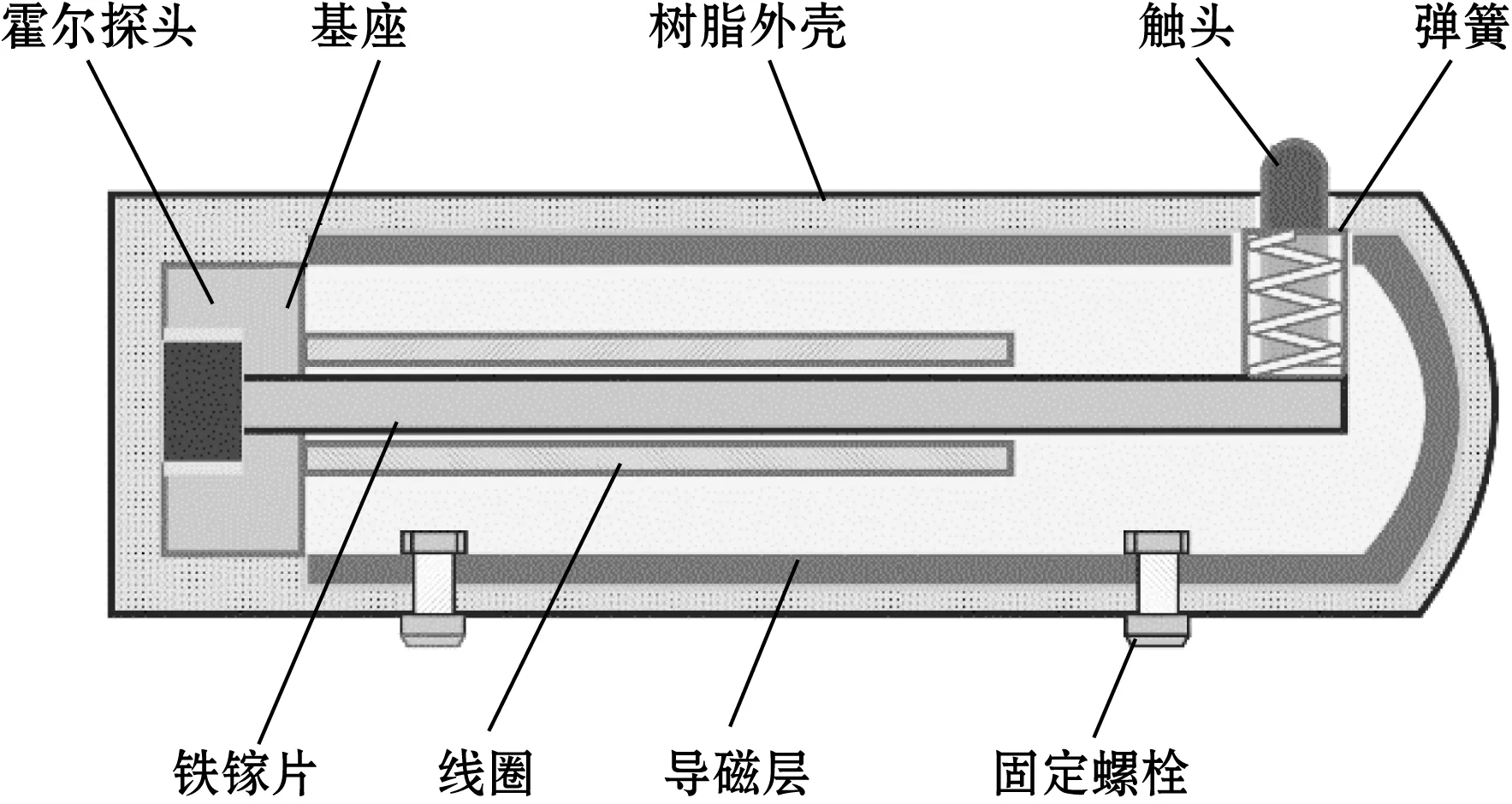
考虑机械手在抓取物体过程中的受力特征,设计的力传感器结构如图1(a)所示。力传感器由励磁线圈、Galfenol悬臂梁、霍尔探头、触头、固定螺栓、基座、导磁层、弹簧以及树脂外壳组成。铁镓片尺寸为长l、宽b与高h,一端固定在基座中,另一端与触头相连,形成悬臂梁结构。固定螺栓起力传感器组件封装的作用。励磁线圈通过改变励磁电流,来调控铁镓合金初始磁化状态。霍尔探头SS491B是磁信号采集模块,放置在Galfenol悬臂梁的水平固定端。导磁层由铁基带材退火碎化制备而成,能够为力传感器提供合理的磁回路,也能够有效的屏蔽外界电磁干扰。弹簧固定在树脂外壳上,防止铁镓片发生过度形变。树脂外壳为力传感器外骨架,通过3D打印技术制备而成。图1(b)为力传感器在智能机械手中的装配图,力传感器以阵列的方式嵌入智能机械手中的各个关节。
(a)结构图
机械手在抓取物体时,触头与物体接触,并将作用力F传递到Galfenol悬臂梁自由端,铁镓片发生相应的形变,并在内部产生应力。基于磁致伸缩逆效应,铁镓合金内部磁畴受应力的影响发生偏转,自身磁化状态发生改变,放置在Galfenol悬臂梁端部的霍尔探头,通过检测磁信号的变化量ΔBG反映作用力F的大小。由于霍尔探头受探测范围的限制与空气隙漏磁的影响,所检测的磁信号与悬臂梁固定端局部磁信号变化量成比例关系。
2 力传感器输出特性模型与实验测试
2.1 力传感器输出模型
由力传感器工作原理与霍尔效应,力传感器输出电压Vout可以表示为
(1)
式中:δ为霍尔探头转化系数;KH为漏磁系数。
将力传感器在未受力时的输出电压标定为基准电压Vref,则式(1)可以表示为
Vout=Vref-δKHBG(F,H)
(2)
式中:BG为铁镓合金磁感应强度;H为励磁线圈提供的偏置磁场。
由文献[14]可知,在低饱和磁场下,铁镓合金磁导率为
(3)
式中:μ0为真空磁导率;Ms为铁镓合金饱和磁化强度;K4为四阶各向异性常数;λ100为铁镓合金[100]方向饱和磁致伸缩;σ为所受应力。
则在低饱和磁场范围内,铁镓合金磁感应强度、偏置磁场与应力的非线性本构关系为
(4)
由压磁方程可知,铁镓合金受作用力后应力为
σ=E(ε-d33H)
(5)
式中:ε为铁镓合金应变;d33为压磁系数;E为杨氏模量。
取悬臂梁轴向方向为x轴,z轴沿悬臂梁高度方向,原点取固定面中心。依据欧拉-伯努利梁理论,在点(x,z)处,应变与作用力F的关系为
(6)
式中:I为截面惯矩;Galfenl悬臂梁在x处挠度为ω(x,F)=Fx2(3l-x)/6EI。
将式(6)代入式(5)中,得Galfenol悬臂梁应力分布为
(7)
霍尔探头能够有效的探测铁镓片轴向0~x0范围内磁感应强度的变化量,该区域为霍尔探测域。则霍尔探测域内应力均值为
(8)
式中c为应力等效系数。
将式(8)代入式(4),则霍尔探测域内磁感应强度为
(9)
将式(9)代入式(2),则力传感器输出模型为
(10)
式中:参考电压Vref与漏磁系数KH在偏置磁场一定时为常数。
可以通过式(10)计算力传感器受力后的输出电压。理论计算所需参数如表1所示[14-15]。

表1 理论计算参数表
2.2 力传感器实验测试
为验证输出模型并探究偏置磁场对传感机理的影响,进行力传感器输出特性测试。实验平台如图2所示,由传感器样机、数据采集卡、施力计、磁场调节装置与上位机所组成。力传感器线圈电流由磁场调节装置调控,来产生不同的偏置磁场。线圈电流i与偏置磁场H的关系为H=Ni/L,线圈匝数N=200,长度L=20 mm。施力计沿竖直方向作用在力传感器触头,在受力稳定后,数据采集卡将力传感器输出信号上传到上位机,由上位机中的软件DHDAS分析系统显示并记录。为保证实验数据的可靠性,每点作用力测试重复进行5次并取均值。

图2 实验工作平台
实验测试得偏置磁场、作用力与输出电压的关系如图3所示。偏置磁场在2~3 kA/m范围内时,力传感器输出特性受磁场强度的影响较明显,偏置磁场的增加能够显著提高力传感器输出特性。偏置磁场为3 kA/m时,传感器具有最佳的输出特性,最大灵敏度为193 mV/N,作用力大于1.4 N后,传感器输出电压逐渐进入饱和状态。当偏置磁场在3~10 kA/m范围内逐渐增加时,传感器输出电压与作用力的关系表现为线性量程向右偏移,幅值逐渐下降。因此适合力传感器工作的最佳偏置磁场为3 kA/m,测力范围为0~2 N,在0~1.4 N范围具有较高的灵敏度。
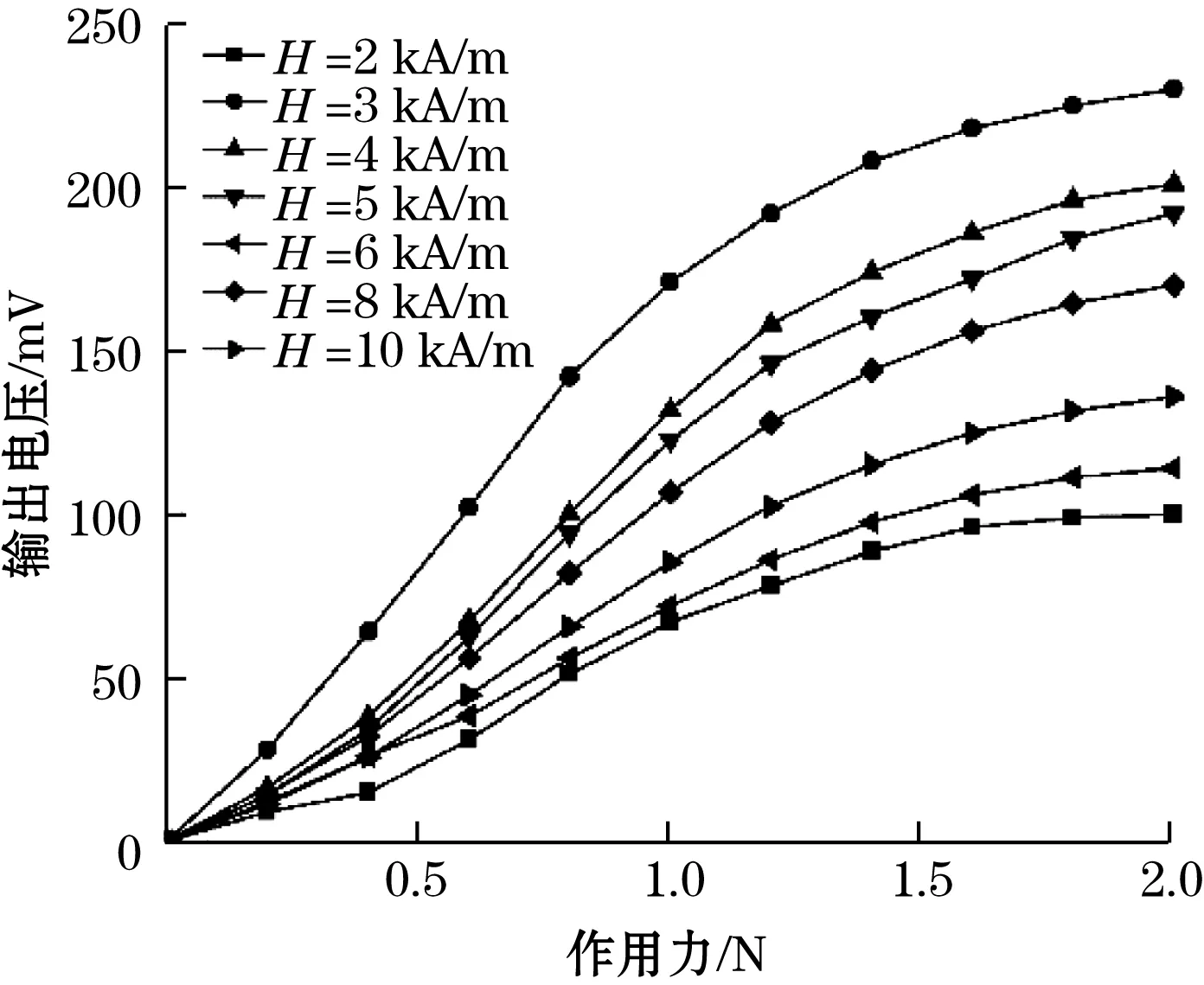
图3 不同偏置磁场下输出电压与作用力的关系
在偏置磁场为3 kA/m时,上位机采集到的基准电压Vref为460.1 mV。为精确反映漏磁系数,通过实验数据拟合计算得KH为9.28×10-3。输出模型与实验对比如图4所示,输出模型式(10)能够准确反映作用力与传感器输出电压的耦合关系,平均误差在5%以内。
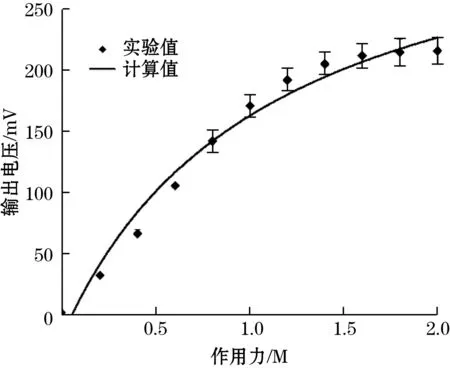
图4 最佳偏置磁场下实验数据与理论计算对比
在最佳偏置磁场作用下,为满足智能机械手反复抓握的工况需要,对力传感器进行了2~12 Hz的动态测试。采用线性电机为力传感器提供F=1+sin(2πft)的动态力,用来模拟机械手在抓握过程中的受力情况,其中f为施加力的频率。线性电机的施力端安装有石英力传感器,能够精确反映出施加的力大小。把力传感器的输出电压与石英力传感器输出的力信号通过数据采集卡发送到上位机,由DHDAS分析系统进行数据采集。力传感器动态测试结果如图5所示。

(a)f=2 Hz
在2~12 Hz的施力频率范围内,力传感器输出电压最大的相位偏移量为0.25°,具有极小的滞后性。动态作用力超过1.4 N之后,铁镓合金磁畴受作用力的影响逐渐进入饱和状态,使力传感器灵敏度逐渐下降。受铁镓合金磁滞效应的影响,随着施力频率的增加,谐波引起的测量误差对力传感器输出特性的影响逐渐增大,频率与谐波误差的关系如表2所示。频率为2 Hz时,可以忽略谐波误差。频率为12 Hz时,谐波引起的误差为9.4%。

表2 谐波误差表
3 力传感器数字滤波系统设计
为降低谐波干扰,提高力传感器动态输出特性,利用Matlab信号处理工具箱中的滤波分析器,设计巴特沃斯(Butterworth)低通滤波器,并将滤波算法嵌入单片机STM32中,完成对力传感器输出信号的数字滤波。
巴特沃斯滤波器在通带内具有最大的平坦性,其幅频与相频特性随频率的增加单调下降,具有良好的线性相位特性,算法简单易于设计与实现[16]。设巴特沃斯低通滤波器传递函数为H(s),则其幅度平方特性满足:
(11)
式中:Ω为角频率;N为滤波器阶数;Ωc为边界频率。
巴特沃斯滤波器系统传递函数为
(12)
式:ai、bj为滤波系数;一般满足M≤N,其中N被称为滤波器的阶数。
由式(12)可知,输入输出的常系数差分方程可以表示为
(13)
在Matlab滤波设计器中,将采用频率设为2 kHz,与动态实验中的数据采集卡采用频率一致,采用5阶巴特沃斯低通滤波,截止频率设置为50 Hz。将滤波器所设计的系数代入式(13)中,得到相应的滤波算法。由式(10)可知,力传感器所测作用力为
(14)
根据滤波算法与式(14),在单片机STM32中完成滤波与作用力计算。在施力频率为12 Hz时,力传感器输入输出对比关系如图6所示,最大谐波误差不超过0.5%,相位偏移误差量可以忽略不计。所设计的数字滤波系统,能够有效的提高力传感器的测量精度与动态响应频率范围。
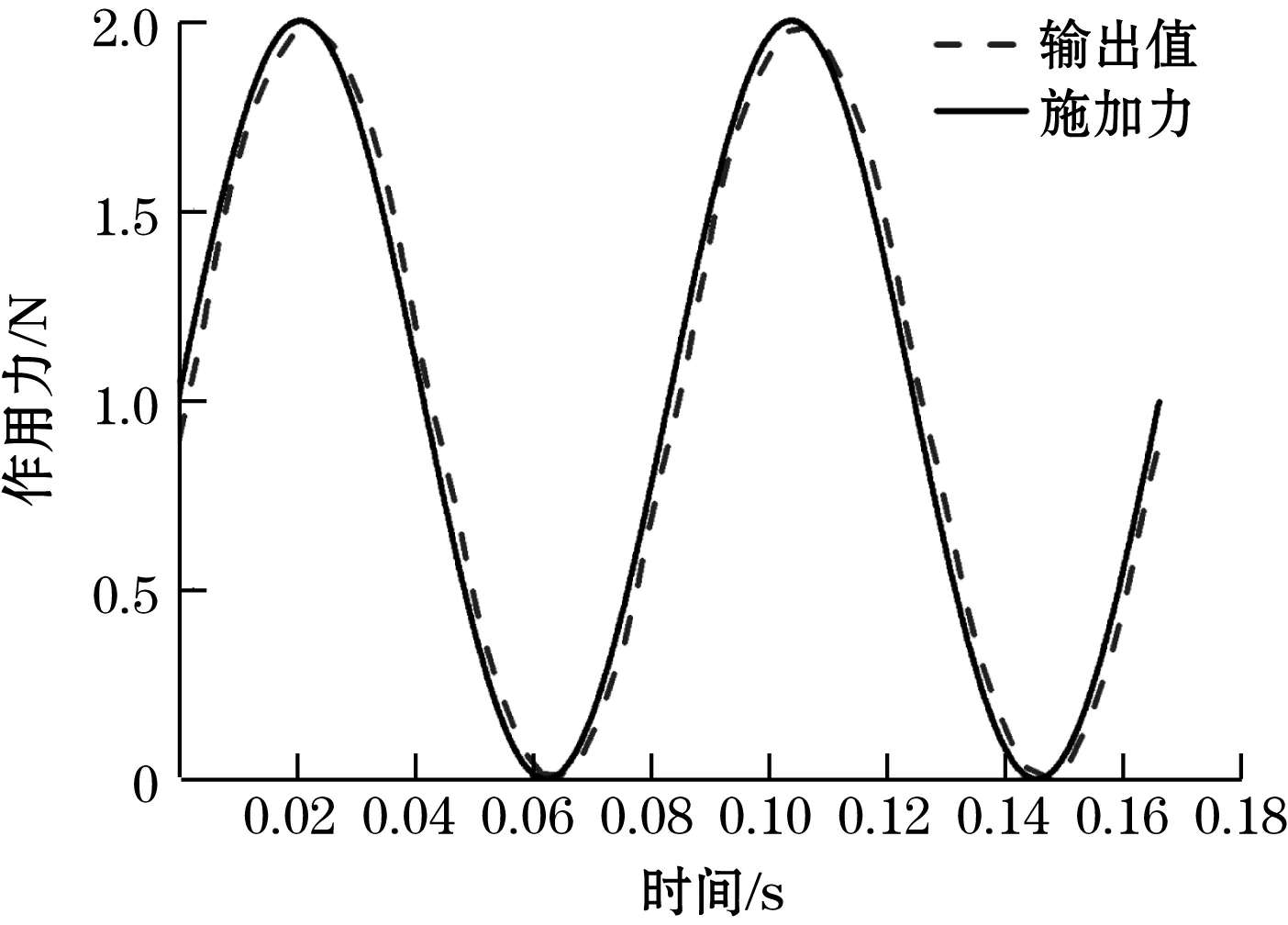
图6 传感器输入输出对比
4 结束语
以铁镓合金为核心材料,设计了新型悬臂梁式力传感器,应用于智能机械手接触力检测。在铁镓合金磁化模型与悬臂梁理论的基础上,推导了力传感器受力与输出电压的解析关系。搭建了实验平台,研究了偏置磁场对力传感器输出特性的影响,并确定了适合力传感器工作的偏置磁场。为消除铁镓合金的磁滞效应所产生的谐波干扰,完成了力传感器数字滤波系统的设计。实验结果表明,Galfenol悬臂梁式力传感器具有动态性能好、结构简单与灵敏度高等优点,能够满足智能机械手对接触力精确测量需要。
