基于时空资源优化的交叉口交通流动态控制方法研究
2020-10-19梁子君张卫华
梁子君, 张卫华, 杨 伟, 严 雪
(1.合肥学院 城市建设与交通学院,安徽 合肥 230601; 2.合肥工业大学 汽车与交通工程学院,安徽 合肥 230009; 3.安徽省交通规划设计研究总院股份有限公司,安徽 合肥 230088)
0 引 言
随着城市道路车辆数量激增,交叉口交通需求与供给之间的矛盾日益激化,基于交叉口时间与空间资源优化调配的交通流控制是提升交叉口通行效率的重要途径。交叉口交通流控制是以信号控制为手段,一般以信号相位作为基本控制单元。面向交叉口通行效率不断提升的控制需求,交通信号相位和配时的协同优化是近年来交通流控制的主要研究方向。
在机动车交通流控制方面,为进一步提升控制效率,文献[1]研究了一种考虑流线搭接的最优信号控制方案算法;文献[2]提出了一种交通信号组合优化控制的方法;文献[3]建立了交叉口不对称交通流的动态相位信号控制参数优化模型;文献[4]提出了一种基于感应控制的逆向可变车道方案;文献[5-6]分别基于绿灯利用率和出租车GPS轨迹数据开展了信号相位和配时优化研究;文献[7]提出了一种车辆分散协同自适应巡航控制算法,可以在有限的交通信号周期内,使更多的车辆通过路口。
在非机动车与行人交通流控制方面,考虑到非机动车、行人与机动车之间的冲突,文献[8]利用行人二次过街方案设置原理提出了单进口放行方式下交叉口行人嵌套相位设计方案;文献[9]研究了不同时段的行人早开相位控制策略,可以明显减少交叉口行人与机动车的冲突;文献[10]提出了典型交叉口的行人和非机动车专用相位设置方法,并评估了控制效果;文献[11-12]提出了专用行人相位的设置模式、信号配时与安全分析。
在公交车交通流控制方面,围绕公交优先控制方法,文献[13]通过短时预测交叉口交通流量研究了单点自适应控制条件下的公交信号优先方法;文献[14]以进口道公交左转优先为目标提出了一种逆向可变车道及左转公交专用道设置方法;文献[15]提出了一种考虑路段上公交车和小汽车物理排队的自适应公交信号优先设置方法;文献[16]在交叉口控制可靠性的前提下研究了公交信号优先配时优化模型;文献[17]、文献[18]在提高公交优先服务可靠性方面分别提出了多目标优化控制算法、采用预信号的自适应控制算法;文献[19]研究了用于解决公交信号优先请求相互冲突的一种两相位自适应信号控制策略。
上述控制方法虽然实现了车辆延误、排队长度、人均延误等指标的优化,但都是对机动车、公交车、非机动车、行人中的1种或2种类型交通流开展相位及配时优化研究。一方面基本以信号相位为基础,信号控制的灵活性和效率仍显不足,不利于交叉口时空资源灵活调配;另一方面尚未对交叉口所有交通流时空资源动态分配进行统筹考虑和分析,未考虑一种交通流的优化控制对另一种交通流的影响,如公交优先控制对机动车的影响以及机动车优化控制对非机动车与行人等弱势群体的交通影响。因此,亟需在考虑交叉口机动车、公交车、非机动车、行人等主要交通流时空资源分配的基础上开展优化研究,以最终体现控制方法的公平性和有效性。
基于以上分析,本文针对交叉口机动车、公交车、非机动车与行人等不同交通流的精细化调控问题,在交叉口时空资源协同优化方面提出了一种以交通流作为独立控制单元的精细化动态控制方法,并选择合肥市实际交叉口开展优化设计和逻辑算法的仿真验证工作,通过交叉口实际流量数据的仿真结果验证本文方法的有效性。
1 交叉口交通流划分与功能区设计
十字交叉口不同交通流划分与功能区设计如图1所示。
(1) 交叉口交通流划分。考虑通用情况,标准十字交叉口一共可以区分有36股独立交通流,用an、bm表示,n=1,2,…,28;m=1,2,…,8。其中,a1~a8和b1~b8分别代表交叉口北直、东直、南直、西直、北左、东左、南左、西左方向的机动车和公交车交通流,a9~a12为右转交通流,按照交通规则主动避让与其冲突的交通流,设不受信号控制;a13~a20为8股行人交通流;a21~a28为8股非机动车交通流。每股受信号控制的交通流an至少配对1个检测区和1个信号灯组SGn,bm配对4个检测点和1个信号灯组SGbm,形成一个独立的控制单元。
(2) 行人与非机动车过街功能区设计。为了缩短非机动车与行人的一次过街距离,设十字交叉口各个方向均设置中央安全岛,非机动车与行人采用二次过街的方式通过交叉口,如图1所示。根据行人双向通行规则,交叉口每个方向进、出口处的斑马线两端按照上行和下行方向分别设置行人感应检测区和信号灯;根据非机动车单向通行规则,在交叉口每个方向进、出口处的非机动车通道一端设置非机动车感应检测区和信号灯。感应检测区对非机动车、行人进行存在检测,非机动车、行人信号灯按照设计的控制逻辑对非机动车、行人交通流实施控制。
(3) 进口车道功能区设计。图1中,设十字交叉口各个方向均设置了公交专用道,公交专用道分布在道路中央,为了提高交叉口进口车道空间资源的利用率,把交叉口进口路段至进口车道的范围划分为预信号控制区、车辆变道区和进口控制区3个功能区。

图1 十字交叉口不同交通流划分与功能区设计
预信号控制区的主要元素包括预信号灯组SGxy0(x=1,2,3,4;y=1,2)、公交请求点④、公交到达点③、路段公交专用道和机动车道。预信号控制区主要作用是:当检测公交到达或机动车排队溢出时,SGxy0由绿灯转换为红灯,提前控制机动车在路段机动车道停车线处排队等候,以便公交车从路段公交专用道优先进入交叉口。
车辆变道区的主要作用是为不同通行方向的机动车和公交车提供变道缓冲区。公交车可以根据其行驶路线从路段公交专用道变道进入交叉口直行或左转复用车道(机动车与公交车共用进口车道),当交叉口没有公交车到达时,机动车可正常使用复用车道通过交叉口。
进口控制区的主要元素包括公交直行通过点①、公交左转通过点②、公交离开点⓪、机动车和公交信号灯组SGn和SGbm、复用车道、交叉口停车线附近的请求检测区和机动车排队监控处的排队检测区。进时控制区工作原理是:当交叉口没有公交车请求时,机动车信号灯根据对应检测区的数据按照设计的控制逻辑控制机动车放行,特别是对机动车排队的控制,以免排队溢出至车辆变道区,对公交车进入交叉口造成影响。按照设计的优先控制逻辑,当有公交车到达直行通过点①时,公交车直行绿灯开启,公交车从直行复用车道通过交叉口;当有公交车到达左转通过点②时,公交车左转绿灯开启,公交车从左转复用车道通过交叉口;当公交车到达公交离开点⓪时,则可关闭对应的公交车绿灯。
2 交叉口交通流组合优化
2.1 交叉口交通流绿灯组合
为实现交叉口时空资源的灵活调配,假设交叉口每股交通流的绿灯时间完全由交通流的通行需求决定,即若没有交通需求则不提供绿灯,或交通流放行结束则关闭绿灯。
将图1中受信号控制的机动车、公交车、非机动车和行人交通流考虑在内,根据以上假设可以形成17种绿灯组合集Ak(k=1,2,…,17),见表1所列,Ak代表交叉口交通流绿灯时间和通行空间的资源分配选择。设交叉口任意一股受信号控制且等待放行的交通流为u,若其与交叉口正在放行的任一交通流v均在同一个Ak中,则u可以获得绿灯和空间通行权。

表1 交叉口交通流绿灯组合集
记Fu为图1中受信号控制的交通流资源分配函数,Fu取值为1代表交通流u获得通行权,取值为0代表u未获得通行权,即
(1)
2.2 交叉口交通流绿灯间隔矩阵
为避免公交车和机动车、非机动车以及行人在交叉口内部发生冲突,根据不同交通流在交叉口的清空距离和速度、进入距离和速度的测算,计算每股独立交通流所配对信号灯组之间的绿灯间隔时间,构建绿灯间隔矩阵,为每股交通流的绿灯切换和组合提供重要依据和安全保障。绿灯间隔时间tg的计算公式为:
(2)
其中,ty为黄灯时间;tr为全红时间;tu为通过时间;sc为基本清空距离;vc为清空速度;Lv为车辆长度;Se为进入距离;ve为进入速度。
绿灯间隔矩阵实例见表2所列。
表2矩阵中,各个数值为2个冲突信号灯组之间的绿灯间隔tg。绿灯间隔矩阵中的信号灯组SGn、SGbm的冲突关系由各自关联的机动车、公交车、非机动车及行人交通流的流向冲突情况而形成。
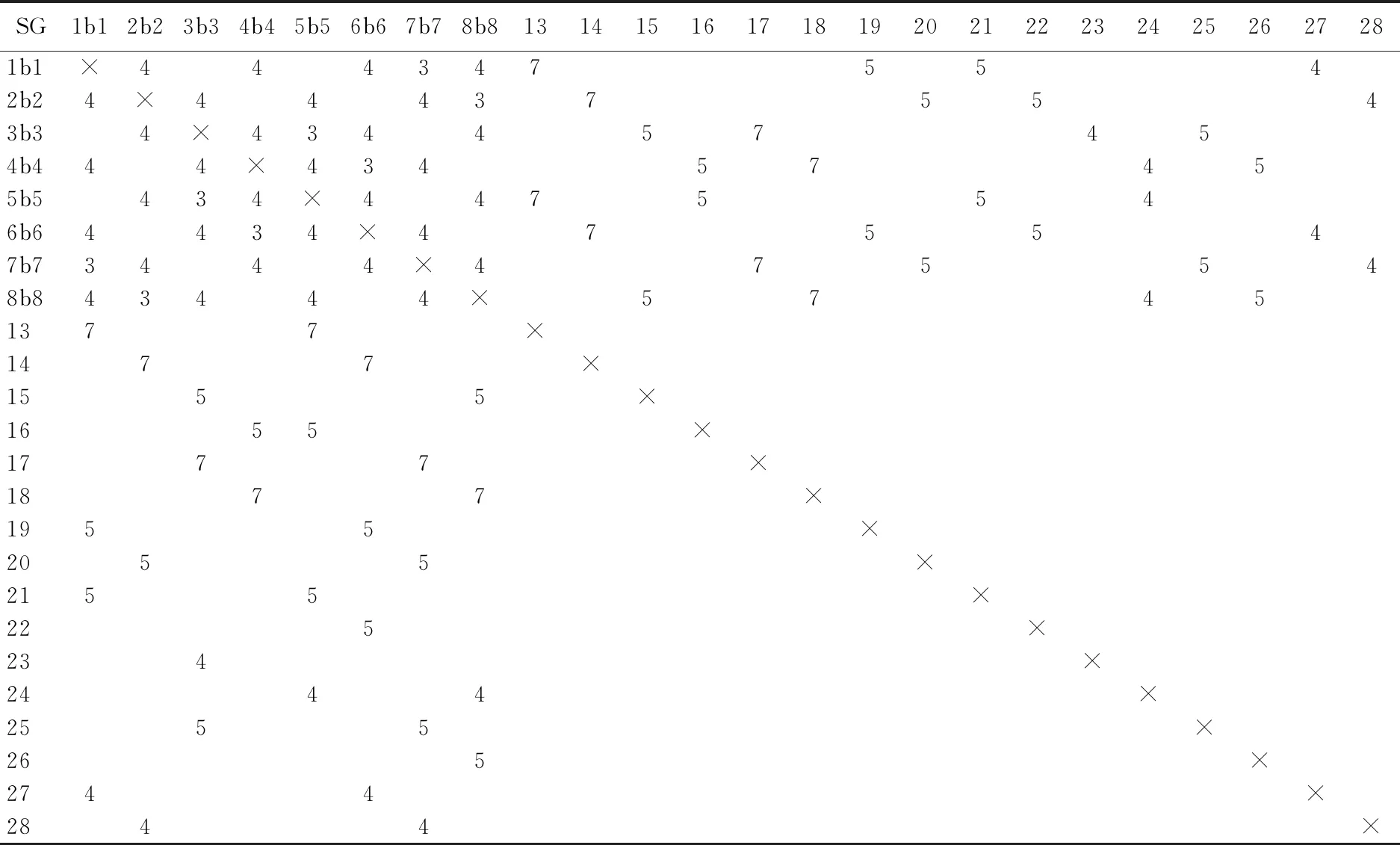
表2 交叉口交通流绿灯间隔矩阵
3 交通流控制逻辑规则
为实现交叉口不同交通流时空资源的实时动态优化,需建立不同交通流之间可相互协同的交通流控制逻辑规则。本文提出了机动车动态优化控制、非机动车与行人过街控制和公交协同优先控制3种协同的逻辑规则。
3.1 机动车动态优化控制逻辑
机动车开放绿灯需具备2个条件:① 机动车交通流获得通行权,即满足(1)式中的Fu=1;② 需满足绿灯间隔tg条件要求。
机动车动态优化控制逻辑如图2所示。

图2 机动车动态优化控制逻辑
为兼顾交叉口各个方向机动车交通流的通行和排队监控需求,机动车动态优化控制逻辑描述如下:
(1) 设当前放行绿灯的信号灯组为SGi,下一个待放行绿灯的信号灯组为SGj(i,j=1,2,…,8)。当SGi的当前绿灯时间gi大于等于最小绿灯时间Gimin时,判断SGj配对的排队检测区占有时间Oj是否达到阀值Tj;若否,则判断SGi配对的请求检测区车头时距Hi是否达到阀值ti;若是,则SGi关闭绿灯;若否,则SGi持续开放绿灯至最大绿灯时间Gimax后再关闭绿灯。
(2) 若SGj配对的排队检测区占有时间Oj达到阀值Tj,说明待放行交通流存在长排队,有紧迫绿灯需求,此时需继续判断SGi配对的排队检测区占有时间Oi是否同样达到阀值Ti;若是,说明当前放行的机动车交通流同样存在长排队,则SGi需继续开放绿灯至临界绿灯时间Gi2后再关闭绿灯;若否,则SGi运行完最小绿灯时间Gimin后立即关闭绿灯。
(3) SGi关闭绿灯后,SGj关联的机动车交通流获得通行权,SGj满足绿灯间隔条件后即可启亮绿灯。并继续从步骤(1)开始循环判断。
3.2 非机动车与行人过街控制逻辑
当交叉口某一通行方向的非机动车或行人交通流u对应检测区的占有时间Ou达到阀值Tu时,说明该方向有非机动车或行人过街需求。根据(1)式判断u与交叉口正在放行的任一机动车或公交车交通流是否均在同一个Ak中:若是,则u可获得通行权;若否,则u需等待冲突方向的机动车或公交车绿灯结束后获得通行权。在满足绿灯间隔条件后u获得一次较短的过街绿灯时间,冲突方向的机动车或公交车必须等待u的过街时间结束且满足绿灯间隔条件后才能启亮绿灯。非机动车与行人过街控制逻辑如图3所示。

图3 非机动车与行人过街控制逻辑
3.3 公交协同优先控制逻辑
公交协同优先控制逻辑是在整合机动车动态优化控制逻辑和非机动车与行人过街控制逻辑基础上设计的,以最终实现交叉口时空资源的协同优化,主要有以下规则:
(1) 优先请求生效规则Rr。图1中公交请求点④检测到公交车到达时,将产生优先请求,当Rr=0时表示该请求在当前信号周期不生效,需符合判定条件Tr,即与公交车通行方向冲突的机动车交通流存在长排队。反之Rr=1,表示请求生效,执行动作Dr,即交叉口进入公交优先过渡状态,记录当前正在或将要启亮绿灯的机动车信号灯,对应的机动车交通流及与其不冲突的非机动车与行人交通流根据设定的控制逻辑放行。
(2) 公交优先级判别规则Rd。当交叉口多个方向公交优先请求同时生效时,假设所有公交车的通行需求均一致,则以尽量减少对当前机动车绿灯的干扰为原则确定公交优先次序。当Rd=1时表示公交车有最高优先级,需符合判定条件Td1,即公交通行方向与当前放行或待放行的机动车绿灯不冲突,具体参见表1。反之,Rd=2,表示公交车有一般优先级,交叉口根据公交车的到达时刻依次给予优先控制。通行方向不冲突的公交车可同步执行优先控制。
(3) 优先信号调整规则Rt。根据规则(2)确定当前执行优先控制的公交车以后,当图1中公交到达点③未检测到公交车时,Rt=1,执行动作Dt1,即当前机动车交通流根据设定的优化控制逻辑继续放行绿灯,若绿灯结束,则其他方向机动车交通流将不再放行绿灯,处于等待状态。此时交叉口所有方向的非机动车与行人将获得通行权,且满足绿灯间隔条件前提下即可开放绿灯,符合表1中的A17。当公交到达点③检测到有公交车到达时,Rt=2,执行动作Dt2,即公交车所在进口的预信号灯组SGxy0由绿灯过渡为红灯,机动车在预信号控制区排队等候公交车进入交叉口,待公交车到达公交通过点①或②后方可恢复为绿灯。若此时与公交车通行方向冲突的机动车交通流仍然放行绿灯,则该冲突方向的机动车绿灯在满足gimin的前提下即可关闭绿灯,且公交车通行方向的机动车绿灯提前启亮,以清空复用车道滞留的机动车。(4) 优先信号控制规则Rc。当Rt=2时,进一步判断公交车通过交叉口的路线是直行还是左转。图1中,当公交通过点①检测到公交车时,Rc=1,表示公交车在直行复用车道通过交叉口,执行动作Dc1,即公交车直行信号灯在满足绿灯间隔条件下启亮绿灯。当公交通过点②检测到公交车时,Rc=2,表示公交车在左转复用车道通过交叉口,执行动作Dc2,即公交车左转信号灯在满足绿灯间隔条件下启亮绿灯。当公交离开点⓪检测到公交车时,Rc=3,表示公交车离开交叉口,执行动作Dc3,即判断当前优先方向的复用车道是否还有公交车。若是,则在公交车最大绿灯时间内等待最后一辆公交车到达离开点⓪;若否,则关闭当前公交车及同方向的机动车绿灯。
(5) 信号恢复规则Rrc。判断交叉口其他通行方向是否还有公交优先请求,若是,则返回规则(2),Rrc=0;若否,Rrc=1,交叉口进入常规信号恢复处理状态,执行动作Drc,即判断规则(1)所记录的机动车信号灯对应的机动车交通流是否有长排队。若是,则该机动车交通流获得绿灯通行权,进行绿灯补偿;若否,则下一个待放行的机动车交通流获得通行权,交叉口结束公交优先控制状态,机动车、行人及非机动车按既定的控制逻辑继续执行常规的信号控制。
根据以上规则,协同优先控制逻辑如图4所示。

图4 公交协同优先控制逻辑
4 方法验证与分析
4.1 验证方案
选择合肥市望江东路与石台路交叉口的数据对本文方法做进一步仿真验证。其中望江东路是东西方向的主干道,石台路是南北方向的次干道,望江东路中央具备公交专用道。交叉口现状渠化如图5所示;按本文方法对交叉口的功能区进行优化设计,如图6所示。

图5 交叉口现状渠化

图6 交叉口功能区优化设计
把最内侧的公交专用道调整为公交车和机动车复用的直行和左转车道,以提高交叉口车道资源的利用效率;同时完善非机动车与行人过街安全岛设计并增设检测区,缩短其一次过街距离,非机动车与行人采用二次过街方式通过交叉口。选取交叉口工作日15:30~17:30非流量饱和时段的平均交通流量调查数据进行分析,见表3所列,其中西进口流量明显较大,交叉口流量存在不均匀分布现象。

表3 交叉口15:30~17:30时段平均交通流量数据
根据上述条件,本文方法验证方案如下:首先在图5现状渠化基础上采用韦伯斯特法对现状相位配时方案进行一次优化;然后在图6交叉口功能区优化设计基础上采用本文算法逻辑进行二次优化;最后通过Vissim仿真模拟不同条件下的对比方案,见表4所列,并针对不同交通流进行效益指标分析。

表4 不同条件的对比方案
4.2 信号控制方案
交叉口现状渠化方案东、西进口具备中央安全岛,可设置行人二次过街相位,一次优化方案见表5所列。采用Vissim的VAP算法编辑模块完成二次优化方案的机动车动态优化、非机动车与行人过街和公交协同优先3种控制逻辑编程设计,如图7所示,主要控制参数见表6所列,绿灯间隔参数设置如图8所示(-127表示2个信号灯组不存在冲突关系),交通仿真模型如图9所示。

表5 交叉口一次优化方案

图7 VAP控制逻辑规则编程设计

表6 二次优化方案控制参数

图8 信号灯组绿灯间隔时间设置

图9 交叉口仿真模型
4.3 仿真数据分析
由于方案A是采用韦伯斯特法计算所得,在相位不变的前提下车辆平均延误达到相对最优。由于交叉口东与西、南与北进口流量均存在差异(见表3),方案B可根据机动车流量不均衡情况动态进行表1中的绿灯组合优化,各流向车辆延误比方案A平均减少16.02%,如图10所示。

图10 方案A、方案B车辆平均延误对比
方案C进一步实施了非机动车与行人过街控制,由于机动车需等待非机动车或行人过街清空后才能获得绿灯,各流向车辆延误有所增加,但仍然比方案A平均减少9.06%,如图11所示。而行人过街的平均行程时间(含红灯等待时间)明显减少,比方案A平均减少19.86%,如图12所示,其中,1表示西向东;2表示东向西;3表示北向南;4表示南向北。

图11 方案A、方案B、方案C车辆平均延误对比
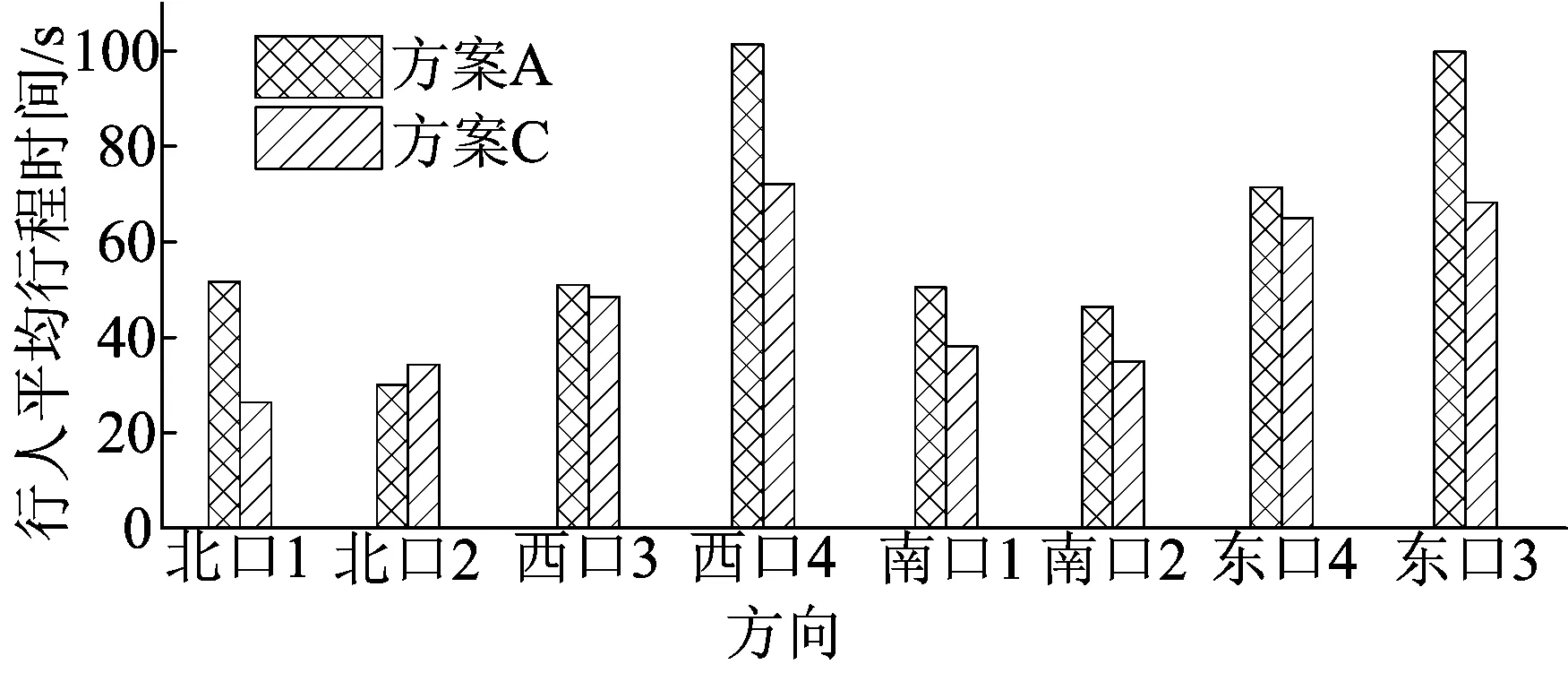
图12 方案A、方案C行人过街平均行程时间对比
方案A中左转的非机动车跟随机动车放行,存在安全隐患,但延误相对较小。方案C中非机动车通过二次过街左转,过街安全性得到较大保障,左转延误比方案A有所增大,但由于获得更多过街机会,延误增幅不是很明显,且直行方向延误减少较多,最终方案C各流向非机动车延误比方案A平均减少6.67%,如图13所示。

图13 方案A、方案C非机动车平均延误对比
方案D根据实际需求执行东口直行与左转公交车、西口直行与左转公交车(东公交与西公交)的优先控制。由于公交车优先通过交叉口时,与其不冲突的交通流可以继续放行,车辆平均延误在东西直行和左转方向相对减少,在南北方向有所增加,但增幅在可接受范围内,而公交车的平均延误降低十分明显,如图14所示。
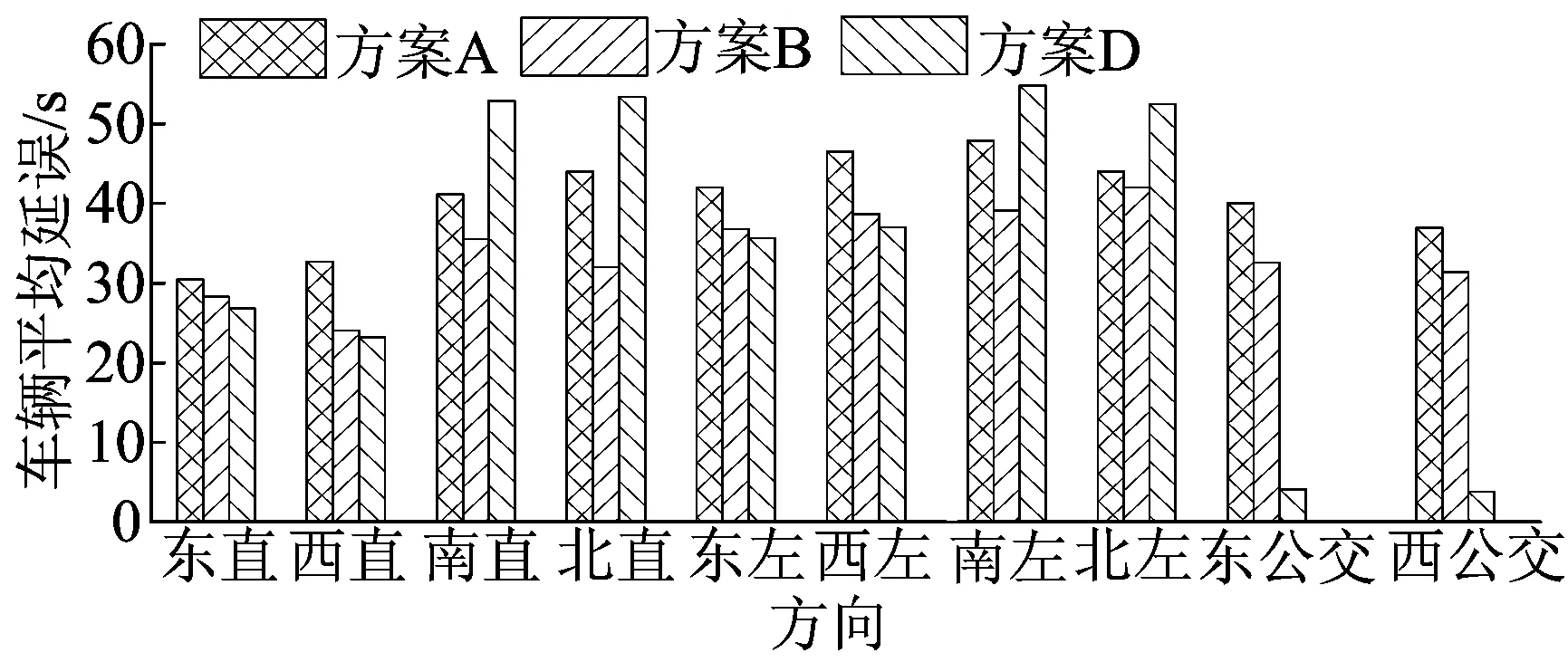
图14 方案A、方案B、方案D车辆平均延误对比
按照机动车平均载客数2.2人、公交车平均载客数30人计算,方案D交叉口人总延误相对于方案A减少了31.81%,相对于方案B减少了19.52%,如图15所示。

图15 方案A、方案B、方案D交叉口人总延误对比
5 结 论
本文创新性地将交叉口机动车、公交车、非机动车与行人的通行需求和路权分配问题进行了统筹考虑和优化设计,突破传统信号相位的限制,从单个交通流和信号灯组的控制逻辑出发,实现交叉口机动车动态优化控制、非机动车与行人过街控制和公交协同优先控制三位一体的交叉口时空资源优化调控,特别适用于交叉口交通流到达随机性强、分布不均衡的情况。
通过实际交叉口数据的仿真分析,结果表明:
(1) 本文方法能有效降低交叉口车辆延误和人总延误,交叉口时空资源得到了充分利用。
(2) 本文方法能有效保障非机动车与行人的过街安全性,并明显缩短行人过街行程时间。
本文方法着重交叉口时空资源的重新调配,控制灵活性较高,其中对交通流出行习惯所产生的实际影响需开展进一步的论证和研究。
