用于航天器微振动试验的高静刚度‒低动刚度隔振器研究进展
2020-10-19胡晓滢周春燕
胡晓滢,周春燕
(北京理工大学 宇航学院,北京 100081)
0 引言
航天器上控制力矩陀螺(CMG)等部件的高速转动、大型可控构件驱动机构的步进运动等,会使星体产生幅值较小的抖动响应。这种微幅值的振动不会对航天器产生明显影响,因此在过去常常会被忽略。但随着对航天器指向精度、分辨率及稳定性等性能指标的要求越来越高,微振动的抑制逐渐成为研究的热点之一。
根据振源的不同可以将隔振目的分为两大类:当振源就是有效载荷本身时,隔振的目的是防止振动传递到周围环境,故需要在振源和基座间加入隔振器;当振源来自外界环境时,隔振则要使传递的振动最小化。根据振动控制方式的不同又可以将隔振分为主动控制和被动控制。由于主动控制技术结构复杂、能耗大,所以目前更多采用被动控制,其中在振源和被保护对象间引入隔振元件的方法,不需要外部能量输入,结构简单,因而应用广泛。传统的被动控制方式包括阻尼耗能减振技术、隔振技术和吸振技术等。Harris等[1]和Rivin[2]对被动隔振系统作了全面的阐述分析。
对于航天器来说,由于其应用环境的特殊性,低频、微幅的振动都会影响航天器的稳定性,故振动控制的频率范围要覆盖 0.2 Hz~1 kHz,振幅小至μm级[3]。航天器的地面微振动测试中要求隔振器具有较高的承载力,可以在支撑航天器重力的情况下,模拟其在轨自由状态实现低频、超低频隔振,且隔振器的附加质量、附加阻尼应当较低,不影响被测结构的特性;然而隔振器的隔振范围取决于线性隔振器的固有频率,若想向低频延伸隔振频带,会导致承载能力降低。传统的阻尼减振技术,阻尼材料对外部环境温度和频率敏感,容易老化,甚至发生蠕变,想拓宽隔振频带,必须加大系统的质量。传统的吸振技术能作用的有效吸振频带非常狭窄,且固定。因此,传统的被动控制方式均不适用于航天器微振动隔振。

根据结构特点,高静刚度‒低动刚度隔振器可分为两种:一种是只有单一弹性元件的隔振器;一种是正负刚度元件并联构成的隔振器[6]。根据安装使用方式,高静刚度‒低动刚度隔振器又可分为底部支撑式和悬吊式;根据隔振方式又可分为被动隔振、主动隔振和混合隔振。
本文将对现有航天器微振动试验中已应用的以及具有应用前景的高静刚度‒低动刚度隔振器类型进行综述。
1 已用于航天器微振动试验的高静刚度‒低动刚度隔振器
1.1 单一弹性元件的高静刚度‒低动刚度隔振器
单一弹性元件虽然存在隔振频带的局限性,但由于其结构简单、体积小、不需要外部能量输入、易于安装,常被用于航天器的微振动隔振系统中。
SoftRide OmniFlex 隔振系统(如图 1 所示)由CSA公司于2008年研制[7],它的主体是由多个弯曲环(flexure loop)隔振器单元组成。当系统受到外界激励时,这种隔振器可通过变形耗散能量提供较大的阻尼,对微振动的隔离具有良好效果。ORBCOMM第2代(OG2)航天器上应用了这种隔振系统。
与弯曲环相似的钢丝绳(wire rope)隔振器 (见图2)也是一种良好的单一弹性隔振元件[8]。这种隔振器的主体是由钢丝绳拧成的弯曲环,具有体积小、附加质量小、承载能力强、安装简易等优点。当外界激励传到隔振器,弯曲环通过较小的变形即可耗散大量能量。此外,这种隔振器除了纵向,还可以实现横向隔振,因此常用于航天器等大型设备的隔振。

图2 钢丝绳隔振器Fig. 2 Wire rope isolator
此外,Kamesh等人以一种折叠的连续梁作为隔振元件设计了低频空间平台[9]。这种隔振平台的优势在于其静刚度较大,可以支撑被隔振航天器结构,而动刚度很小,因此可以有效拓宽隔振频带。Farshad Khorrami等人采用拱形管弹簧设计了一种三自由度被动隔振系统[10]。这种隔振器自适应能力强,可以对振动位移进行有效隔离,设计中还配合机械约束机构来限制航天器的相对转动。实验显示,当受到 10 Hz纵向振动和 20 Hz横向振动时,该隔振器可分别降低50%的纵向、横向响应。
1.2 正负刚度并联的高静刚度‒低动刚度隔振器
这类隔振器通常由正刚度元件和负刚度元件并联组成。与单一元件隔振器相比,负刚度的引入可以进一步使得系统的总动刚度接近0,而正刚度的存在又可以保证系统在大荷载作用下变形很小。当受到外界振动干扰后,通过正负刚度结构的微小变形消耗能量,保证被隔振物体不受或仅受到很小的影响。这种隔振器的隔振频带更宽,尤其可以实现低频、超低频处的隔振。
基于欧拉屈曲梁的负刚度结构常被应用于高静刚度‒低动刚度隔振系统的设计。NASA曾设计过一种基于屈曲梁的零刚度悬吊系统[11],如图3所示。屈曲梁隔振器的引入一方面可以进一步降低系统垂向的刚度实现低频隔振,模拟航天器自由在轨状态;另一方面还可以节省悬吊空间。在国内,刘兴天等人提出了使用轴向受压的斜置屈曲欧拉梁,提供负刚度和线性弹簧并联构成准零刚度隔振器[12-13](如图4所示)。通过动力学理论分析可知,激励振幅减小,系统的固有频率也会减小,隔振效果会随之提高,因此这种隔振器对微振动的隔离有良好的效果。由于屈曲梁的设计会引入非线性,使得系统的响应发生跳跃现象,故而针对这种非线性动力学行为,高双等人讨论了不同参数对隔振器力传递率和跳跃频率的影响[14],为实际工程应用提供了理论基础。
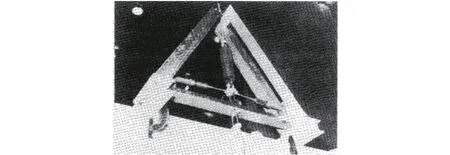
图3 NASA 设计的零刚度悬吊系统Fig. 3 Zero-stiffness suspension system designed by NASA
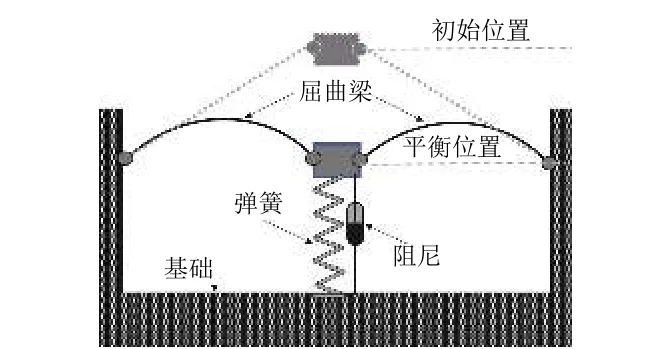
图4 轴向受压的斜置屈曲欧拉梁为负刚度结构的高静刚度‒低动刚度隔振器Fig. 4 High static stiffness and low dynamic stiffness isolator with axial compressed oblique buckling Euler beams as the negative stiffness structure
1.3 磁悬浮‒气动高静刚度‒低动刚度隔振器
Robertson等于2008年创新地提出了一种磁悬浮隔振系统[15-16],将磁铁作为负刚度元件来降低系统的固有频率。该系统可调性强,且适用于大型结构物的隔振。研究表明,这种隔振器的预期振动扰动的量级和所需系统的稳健性会随着系统的逐步稳定呈非线性增长;当受到外界激励时,在准零刚度的平衡位置附近系统的共振频率降低。因此该系统对低频、超低频振动具有良好的隔振效果。在此基础上,马建国等将磁悬浮作动器与气囊隔振器并联构造出一款混合隔振器[17],其结构如图5所示。气囊除了可以进一步提高隔离宽频线谱振动的性能,还能同实现不同载荷承载的自适应性;磁性弹簧可以使负刚度达到很大的量级,且当外部荷载较大时,其负刚度区域也很平稳。理论和实验结果验证了这种混合隔振器在低频区域隔振效果良好,且在动态输出力下亦具有优越的隔振性能。基于这种设计原理,美空军飞利浦实验室曾为航天器的微振动试验设计了一款气动‒电磁悬吊式隔振器,如图6所示[18]。
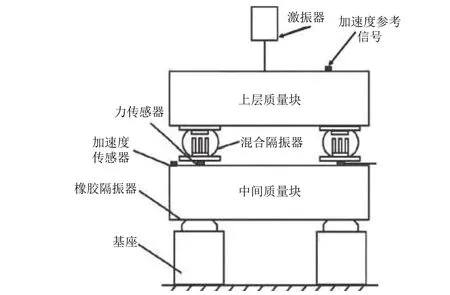
图5 磁悬浮‒气囊并联混合隔振器Fig. 5 Hybrid vibration isolator with parallel magnetic suspension and airbag

图6 气动‒电磁悬吊式隔振器Fig. 6 Pneumatic-electromagnetic suspension isolator
为了进一步优化气动弹簧的性能,赵智等人在原有隔振器的基础上设计了可调式非线性气动隔振器(如图7(a)所示)[19]:当承载质量改变时,通过调节气压,可以保证平衡位置始终具有准零刚度特征。之后,Palomares等人又提出了一种双气动线性制动器作为负刚度机构的准零刚度隔振器[20]:2个气动线性制动器通过连杆与被隔振物体相连,气动弹簧作为正刚度机构。仿真和实验结果表明,该结构的固有频率大大降低,其传递率也随之下降,隔振效果良好。闻荣伟将主动负刚度控制的洛伦兹力制动器与空气弹簧并联,构造了一种稳定的支承型隔振系统[21],设计了六自由度大型空气弹簧隔振平台模型(见图7(b)),为大型气浮隔振平台的应用打下了基础。该设计也适用于航天器微振动试验的支撑。
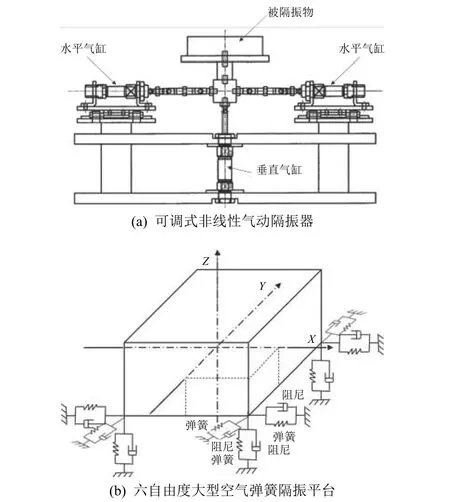
图7 两种气动弹簧隔振器:(a)可调式非线性气动隔振器;(b)六自由度大型空气弹簧隔振平台(b)Fig. 7 Two types of pneumatic spring vibration isolators: (a)adjustable nonlinear pneumatic vibration isolator; (b) a large-scale six-DOF pneumatic vibration isolation platform
1.4 主‒被动混合控制的高静刚度‒低动刚度隔振器
被动控制中一旦元件参数被确定,则很难实现刚度和阻尼的调节,因此很难适应不同工况。为了解决这个问题,在被动控制结构中引入主动控制系统逐渐成为近几年研究的一个热点。主动控制方法较之被动控制方法而言智能性更强,可以实现全频带的振动控制[22]。这种隔振方式可用于对振动具有严格要求的控制系统中,故而常被引入航天器微振动的隔振设计。主动控制系统可以一边检测振动环境,一边根据检测的反馈调节控制参数对振动进行干扰和补偿以实现对结构振动的控制。其中基于Stewart平台的设计是一种常用的主动控制方式。这种隔振器可以实现对多自由度的微振动隔离及对载荷的精确定位。美国Honeywell公司开发过一种由8个液压‒空气作动器组成的Stewart替代式隔振系统[23],该系统除了具有微振动隔离的效果,还可以较好地控制航天器的摇晃模态。
在Stewart平台的设计中,作动器是主动控制的核心部件。常用的作动器除了液压和气动,还有压电和电磁等类型。比利时自由大学(ULB)研发的主动隔振平台[24](见图8(a))采用压电陶瓷作为作动器和传感器,除了可以实现主动隔振,还可以对平台进行定向操作。除了压电陶瓷,还有使用音圈作为作动器,如ULB开发的软主动隔振平台[25](见图 8(b))。
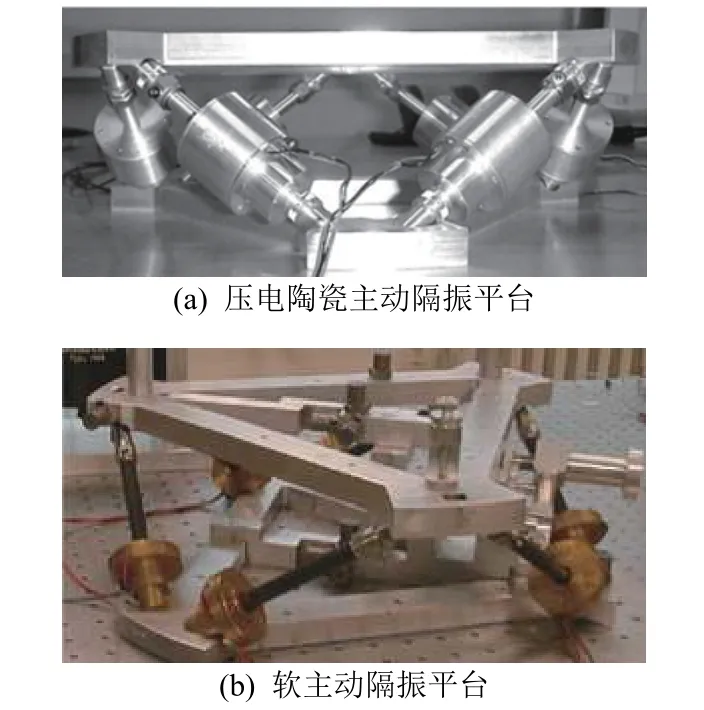
图8 ULB 研发的 2 种隔振平台: (a)压电陶瓷主动隔振平台(b)软主动隔振平台Fig. 8 Two types of active-control vibration isolation platforms developed by ULB: (a) active vibration isolation platform based on piezoelectric ceramic; (b)soft active vibration isolation platform.
2 具有应用前景的几类高静刚度‒低动刚度隔振器
随着近年来高静刚度‒低动刚度隔振器的研究发展,除了以上几类常见类型,一些新型结构的隔振器在航天器微振动试验中显现出良好的应用前景。
吴焕研究了一种碟形弹簧作为负刚度机构的隔振器(如图9所示)[26];通过理论计算得到了参数的设置范围,并分析了动力学特性的各个参数对系统各振性能的影响[27]。该系统属于预变形类高静刚度‒低动刚度隔振器,当激励幅值增加时,受扰动的隔振器会表现出线性、软化、半线性半软化等状态,与等效线性系统相比,隔振性能大大提高。对该系统根据理论计算结果加工了原理样机并开展了静力学和振动实验,得到的实验结果和理论基本吻合。这种隔振器与其他预变形类隔振器相比,静承载能力更高,适用于支撑型航天器微振动隔振器的设计。
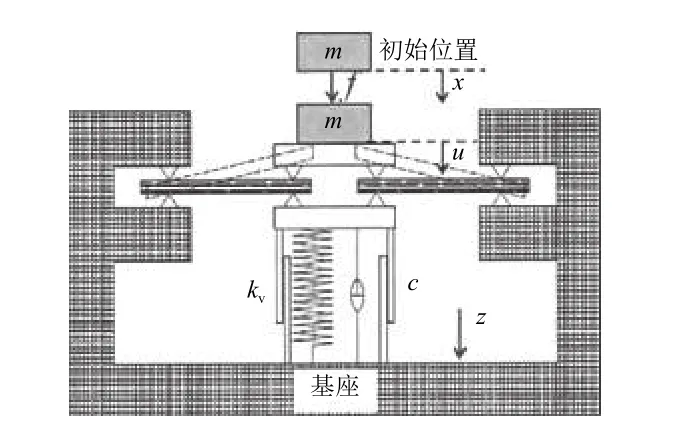
图9 碟形弹簧为负刚度结构的高静刚度‒低动刚度隔振器Fig. 9 High static stiffness and low dynamic stiffness vibration isolator with disc spring as the negative stiffness structure
Izard等以传统的三弹簧模型为基础,创新地提出一种特殊的多孔材料架构(见图10)[28]实现了三弹簧准零刚度的效果。这种结构具有刚度大、密度小的特点,同时可以表现出单或双稳态,在具有高静刚度的同时其固有频率大大降低。这种高静刚度‒低动刚度的材料具有金属泡沫的效果,适用于航天器微振动试验的环境要求[29]。
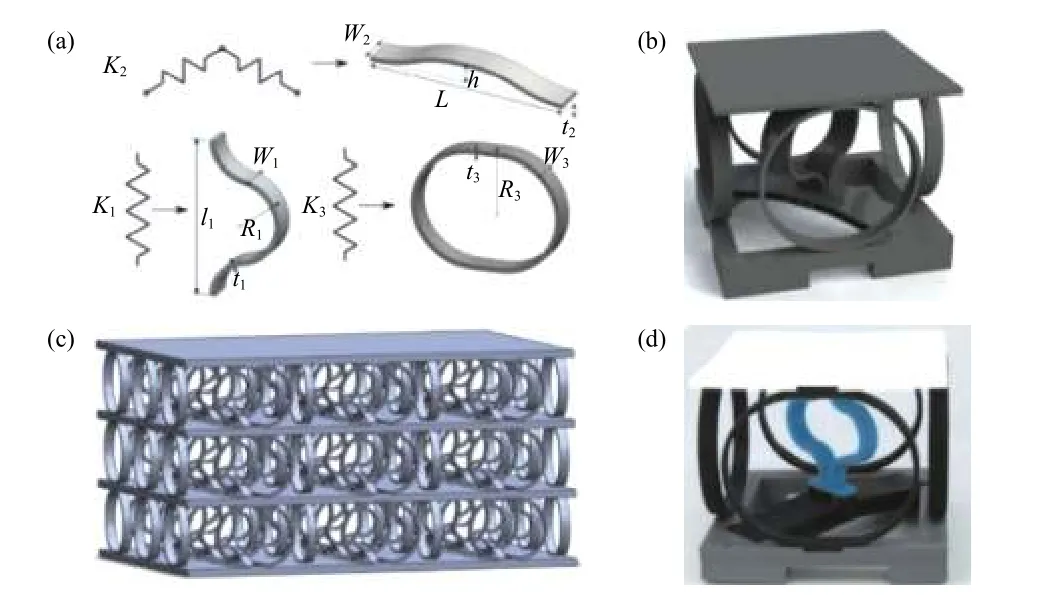
图10 以三弹簧模型为基础的多孔材料架构:(a) 单个胞元的结构;(b) 单个胞元;(c) 多个胞元组成的材料架构示意; (d) 单胞实物Fig. 10 Architecture of porous material based on three-spring model: (a) the structure of a single cell; (b) a single cell; (c) a schematic diagram of a material structure composed of multiple cells; (d) the single cell sample
周加喜等设计了利用2个对称的凸轮滚子[30-31]水平连接弹簧作为负刚度机构隔振器,见图11(a)。在此基础上,应用凸轮滚子的特性设计了准零刚度撑杆构建六自由度的隔振器平台[32](图11(b))以及一种扭转准零刚度隔振器[33](利用4个对称分布的凸轮滚子作为负扭转刚度,中间是橡胶作为正刚度机构)。研究发现这种扭转隔振器对传递扭矩的偏离非常敏感,因此目前这种隔振器只能应用在传递扭矩不变的情况下。Wang K等在此模型基础上将4个对称的滚轮改成了三凸轮滚子结构[34],结合碟形弹簧作为支撑,与滚子接触作为负刚度机构。尽管制造装备过程的误差无法避免,但是通过控制方向和误差量级可以保证隔振器的性能。这种凸轮滚子隔振器的优点是其对微振动十分敏感,选择合适的凸轮滚子半径,可以保证系统在加上被隔振物体后,变形大而刚度小,在低频区域隔振效果良好。通过动态分析发现这种隔振器的跳跃频率与阻尼的种类有密切关系[35],因此在航天器微振动试验中选择合适的阻尼和凸轮滚子参数对于提高该隔振器的隔振效果有很大作用。

图11 凸轮滚子机构高静刚度‒低动刚度隔振器结构示意(a)和基于凸轮滚子机构的六自由度的隔振器平台Fig. 11 Cam-roller mechanism with high static stiffness and low dynamic stiffness, and six-degree-of-freedom vibration isolator platform based on cam-roller mechanism
为了进一步提高隔振系统的性能,时滞系统易于调节的特征也被应用于一些隔振器的优化设计中。徐鉴等在传统三弹簧的高静‒低动刚度结构中引入了时滞反馈控制系统,其结构如图12所示[36-37]。在此基础上,李东海等对这一隔振器进行了动力学分析,结果显示,在控制参数范围内,受控系统的动力学响应更为优越[38],为结构设计提供了理论依据。因此,在航天器微振动试验中可考虑引入时滞系统来提高隔振效果。此外,非线性能量阱[39]也是一种可以引入航天器隔振系统的装置。非线性能量阱结构简单,附加质量小,且可以自适应航天器隔振系统,在外界激励下耗散能量的效果较好,具有提高航天器振动抑制效果的潜能。
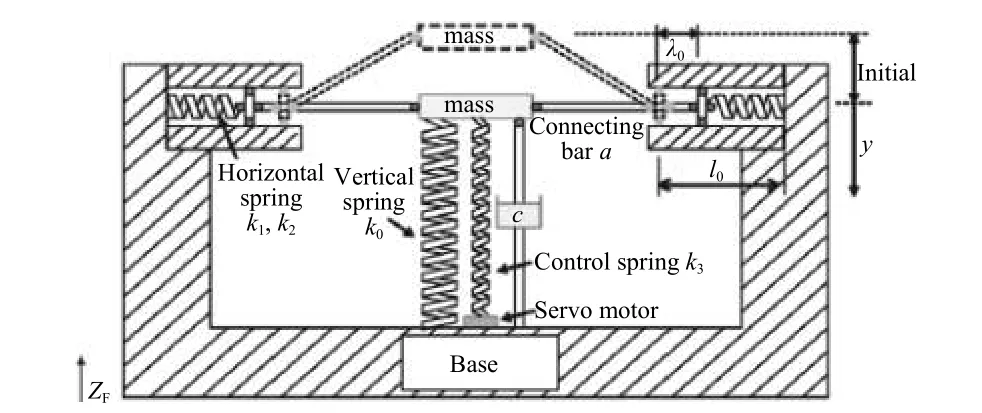
图12 具有时滞反馈控制的高静刚度‒低动刚度单向隔振器Fig. 12 High static stiffness and low dynamic stiffness unidirectional vibration isolator with time-delay feedback control
3 展望
高静刚度‒低动刚度隔振器可以克服线性隔振器难以满足低频隔振要求的缺陷,同时保持较大的承载能力,是振动控制领域研究的热点之一。但由于其自身结构上的一些特点限制了其发展及工程应用,主要包括负刚度结构引起的不稳定性、结构参数难以调节等。今后可以在以下几个方面继续开展研究:
1)针对引入负刚度给系统带来的不稳定性进行理论研究,包括非线性的主共振、亚谐共振和超谐共振及分叉,并进行过载和欠载条件下的动力学分析,来相应提高隔振性能;
2)针对结构参数难调节问题,对结构进行优化设计,使系统可以适应不同载荷不同激励多自由度下的隔振;
3)基于现有的隔振结构及其设计理论,进行新型智能被动隔振材料的研制;
4)针对航天器的特点对现有的隔振器进行改进,将高静刚度‒低动刚度隔振器应用于工程实际。
