车载雷达不落地模式快速标校方法
2020-10-13徐晓煜
徐晓煜
(1.中国电子科技集团公司第三十九研究所 西安 710065;2.陕西省天线与控制技术重点实验室 西安 710065)
0 引言
为提高精密跟踪测量雷达跟踪测量数据的准确度,任务前一般要进行雷达标校,通过标定得到系统误差修正系数,减少雷达测量时的系统误差[1]。
对于车载式雷达来讲,既要求能快速转移,又要能快速拆装,特别是能够快速装配,恢复天线精度,具备工作能力。由于车载雷达在野外执行任务时,不具备进行常规标校的条件,一套快速有效的应急标校方法,对于车载雷达不落地测量模式就显得尤为重要。
本文以车载雷达不落地测量模式为例,采用双GPS及载波相位差分技术进行零值误差标定,以自动调平技术及自动化测试进行大盘不水平标定,获取误差修正参数,提高雷达系统测量精度。
1 零值误差标定
1.1 角度零值标定
由于应急任务采用不落地的工作模式,不具备建立大地标校方位标的条件。因此,方位、俯仰角度零值即成为了标校工作中的重点。
一般我们会在具备零值标定的场地首先对雷达天线的方位、俯仰零值进行标定,并将其写为编码器角度。车载雷达到野外进行任务时,由于车体位置发生变化,会引起天线车航向角的变化。因此,方位零值标定的主要工作在于标定天线车体的航向角。俯仰零值的变化主要是由于大盘不水平引起的俯仰误差,在进行大盘不水平的标定后,可以通过大盘不水平引起的俯仰误差这个误差项抵消。
本文采用双GPS天线定位定向系统来确定天线车的航向角。系统由两个GNSS接收单元、两个测量天线和以嵌入式处理器为核心的计算处理单元(模块)组成。通过两个测量天线接收GNSS卫星信号,利用动基线载波相位差分技术,能精确解算出两个GPS天线位置信息,两者相对位置信息及两天线相位中心连线与真北之间的夹角[2]。
我们选用市场上常规的GPS天线为测量型天线,配置标准的馈线与天线在阻抗、增益、放大倍数等方面与标配的天线有很好的匹配,GPS天线实物图如图1所示。

图1 GPS天线实物图
将两个GPS天线分别旋拧到两个磁基座上并分别固定摆放在测试载体的前进方向和后退方向上,尽可能的将其安置于测试载体的最高处以保证能够接收到良好的GPS信号,同时要保证两个GPS天线相位中心形成的连线与测试载体中心轴线方向一致或平行。安装方式如图2所示。

图2 天线安装示意图
分别将两根天线馈线连接到前后GPS天线和主机单元“ANT1”和“ANT2”接口上,并注意前、后天线的一致对应(“前天线”接口对应连接摆放在被测载体前进方向的天线,“后天线”接口对应连接摆放在被测载体后退方向的天线)。
本方案中两个GPS天线的安装基线为10 m,通过标校消除安装基线与天线方位角的安装误差,定向精度能够达到0.03°。如条件许可,尽量设计足够长的安装基线,可获得更高的定向精度。
1.2 距离零值
雷达的距离零值时指发射信道和接收信道及距离跟踪回路的时延所产生的零值,雷达实测距离应扣除上述总时延。距离零值的标校通常采用反射式或应答式方法。应答式标校距离零值,将应答机置于校准塔上进行[3]。雷达的距离零值R0为
R0=Rc-Rtra-Rr
(1)
其中,Rc为雷达天线自动跟踪校准塔上应答机的转发信号测出的距离值;Rtra用事先测定应答机和应答机至应答机天线馈线的时延值,计算出该时延对应的距离值;Rr用大地测量精确测定雷达天线中心至校准塔上应答机天线中心的距离。
本文采用RTK技术测定雷达天线三轴中心至牵引车综合标校架上电标中心的距离,以此作为大地测量距离Rr,再利用雷达跟踪综合标校架上的信标,得到Rc和Rtra,即可解算得到雷达的距离零值R0。
RTK(Real Time Kinematic)是以载波相位观测值进行实时动态相对定位的技术。其原理是将位于基准站上的GPS接收机观测的卫星数据,通过数据通信链实时发送出去,而位于附近的移动站GPS接收机对卫星观测的同时,也接收来自基准站的信号,通过对所收到的信号进行实时处理,给出移动站的三维坐标[4]。
本文利用RTK测量,配置两台GPS接收机,一台固定安放在天线车上,作为基准站使用;另外一台安装在牵引车综合标校架上,作为移动站进行点位测量。两台接收机之间进行数据通信链,实时将基准站上的观测数据发送给移动站。车载站RTK测距原理如图3所示。
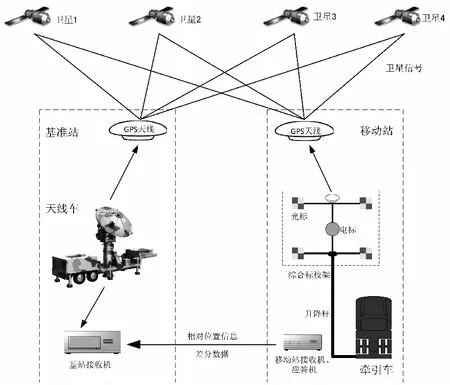
图3 车载站RTK测距原理图
利用嵌入在基准站接收机中的RTK软件对接收到的数据进行实时处理,包括卫星信号、基准站及移动站的信号,可解算出两观测点的三维坐标。并根据两观测点的安装位置分别到天线三轴中心与标校架电标中心位置之间的距离,即可解算得到雷达天线三轴中心到标校架电标中心的距离Rr,其解算结果的精度可达到厘米级。对于雷达米级的测距精度,可远远满足使用要求。
2 轴系误差标定
雷达天线轴系误差主要包括天线座(大盘)不水平、俯仰轴与方位轴不正交、电轴与机械轴不重合等[5]。车载式雷达一般先在阵地进行了落地工作模式的标校工作,车载雷达转场后,只需对有变化的误差项进行标定。因此,车载式雷达不落地工作模式只需对天线座进行调平即可。
大盘不水平会引起雷达天线方位角和俯仰角误差。天线座调平主要通过天线车自动调平单元将天线座调平到30″范围内,然后利用安装在天线座上的电子水平仪对天线大盘不水平进行测试。
2.1 天线座自动调平
为了适应快速展收的需要,将车体快速调平,天线座采用自动调平系统。通过电子水平仪采集误差信号,经过数据处理和控制系统,通过动力源并经减速机构带动支撑腿垂直伸缩运动,同时垂直方向的运动采用自锁式螺旋运动,可将天线车快速稳定的在5 min以内调平至30″内。调平控制面板见图4所示。
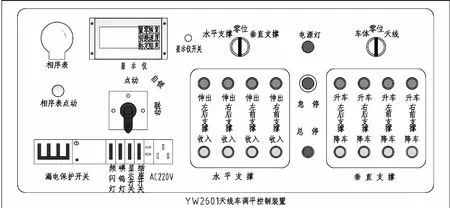
图4 雷达天线挂车调平控制面板
自动调平显示系统如图5所示,天线车调平过程如下:
1)车体到位,调平控制系统加电准备工作;
2)控制支撑腿的垂直马达,并带动调平系统的丝杠运动,将车体撑离地面;
3)由车体电子水平仪给出水平信号,控制调平系统将车体自动调平至30″内;
4)四个支撑腿调平系统的机械锁自动锁定。

图5 自动调平显示系统
2.2 大盘不水平自动测试
完成车体调平后,对天线座大盘不水平进行测试,获得误差修正参数。大盘不水平标校可以通过安装在天线座上的电子水平仪和ACU软件控制进行自动测试。电子水平仪与ACU通过串口连接,通过ACU软件自动控制天线转动,读取相应的数据,采用最小二乘法对测量数据进行拟合,得到天线座最大倾斜量θm和最大倾斜方向的方位角Am。
本车安装的是一款全温补高精度单轴倾角仪,其优良的温度稳定性,能在-40~85℃的宽温环境中保持较高的测量精度、更适合长期野外设备的监测与调平。倾角仪具有卓越的系统集成性,安装简单,抗外界电磁干扰能力强、承受冲击震动能力强。倾角仪模型图如图6所示。
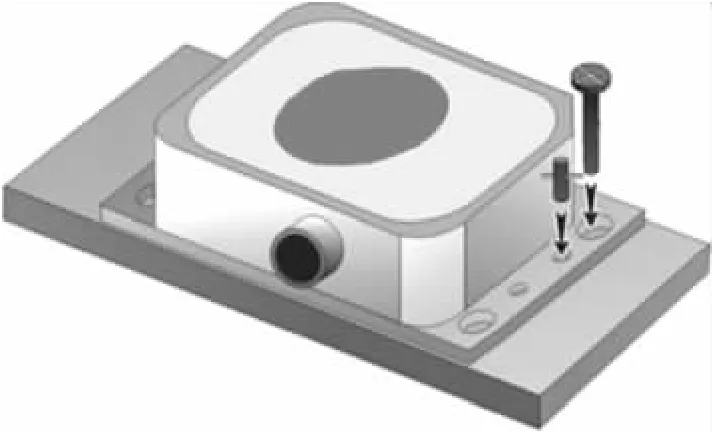
图6 倾角仪模型图
倾角仪利用地球重力原理,当倾角单元倾斜时,地球重力在相应的摆锤上会产生重力的分量,相应的电容量会变化。电容量通过系统内置高精度A/D差分转换器,同时通过5阶滤波算法,从而可以测量传感器输出相对于水平面的倾斜角度。输出接口通过RS422接口与ACU相连接。
自动测试时通过ACU软件自动测试流程,旋转天线方位轴,天线每转动约30°,利用ACU自动录取电子水平仪读数βi和相应的天线方位角度Ai,并进行数据处理。天线座大盘不水平自动测试流程如图7所示。
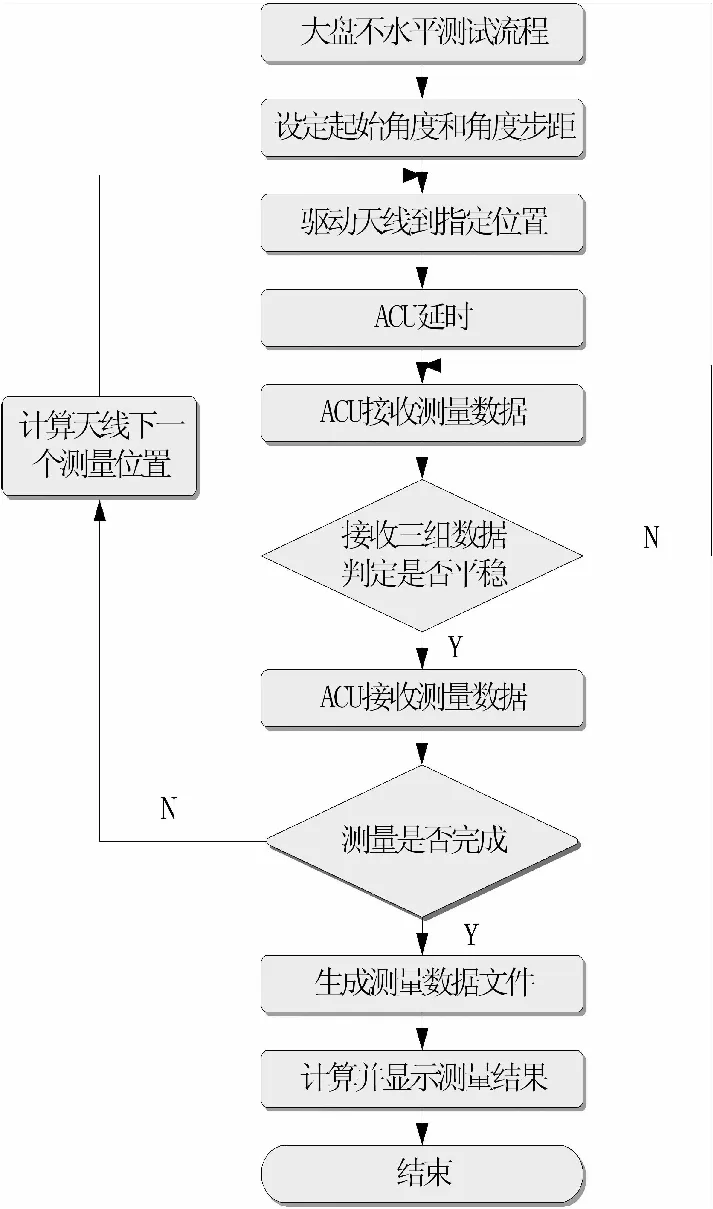
图7 天线座大盘车不水平测试流程
按公式(2)~公式(4)计算方位转盘最大倾斜量θm和最大倾斜方向的方位角Am。
1)计算水平仪读数的平均值为
(2)
2)最大不水平角θM及其方位角AM为
(3)
(4)
经过以上测试及计算,即可得到天线座大盘不水平的测试结果。
3 误差修正
经过以上标校过程,已完成雷达转场架设可能引起的主要误差修正项的处理。其它误差修正项如定向灵敏度、光机偏差、光电偏差等项目,可利用雷达对牵引车综合标校架进行检查。根据以上标校参数,按照公式(5)、公式(6)进行数据修正即可。
A真值=A测量值-(C1-C3tanEcosAcosC4-
C3tanEsinAsinC4+C5tanE-C6secE)
(5)
E真值=E测量值-(C2+C3sinAcosC4-
C3cosAsinC4+C7cosE+C8tanE)
(6)
式(5)及式(6)中:
C1-方位角编码器零值误差;
C2-俯仰角编码器零值误差;
C3-方位轴倾斜误差;
C4-方位轴倾斜方向;
C5-俯仰轴与方位轴的不正交误差;
C6-电轴与俯仰轴的不正交误差;
C7-天线重力下垂误差;
C8-大气折射修正后的残差。
ACU软件已具备数据修正功能,只需将误差修正参数写入数据修正模块,即可完成测量数据的自动修正。
4 结束语
上述快速标校方法已在某车载雷达系统中成功应用,通过以上标校过程,得到雷达的误差修正参数,使雷达系统快速具备参加试验任务能力。经试验验证,车载雷达在不落地工作模式应急测量时,使用以上快速标校方法,可简单快捷的获取雷达天线的误差修正参数,任务时进行数据修正,可获得较高的跟踪测量精度。
