车辆前向防撞雷达的一种设计方法
2020-10-13高一栋洪香茹
高一栋 刘 帅 洪香茹
(西安电子工程研究所 西安 710100)
0 引言
车辆前向防撞雷达提供高精度测目标的距离、方位、速度等信息,距离信息通过采样单元进行解算,速度信息通过多普勒频率进行估算,而目标方位信息可通过多通道采样进行估算获取。对于目标方位向信息的获得,有多种天线方案可供选择,如相控阵天线、带有伺服系统的机械天线、固定波束切换天线等。但是,他们都有各自不足,不适合小型化防撞雷达的需求。如机械扫描天线,具有伺服系统的机电一体化天线,体积较大,结构复杂,可靠性差,不适合安装在车辆前方;固定波束切换天线,其分辨力较低,测角精度差;毫米波相控阵天线体制,目前比较成熟,可获取较高的方位精度,缺点是系统成本高、效率低、功耗较大。使用多通道时分复用阵列天线体制,可克服上述天线缺点,稳定性好、成本低,通过采用的空间数据进行方位估计,可获得较高的精度。
目前,采用单个发射天线,多接收天线多通道接收机的调频连续波体制模型最为广泛,通过集成多通道接收机,进行多通道AD同时采样,利用FFT,快速进行数字波束合成,获得距离、速度、方位向的估计[1]。这种系统模型主要存在的问题如下:
1)每个接收天线连接一个独立的接收通道,结构复杂、功耗高、体积大,增加了整个系统成本。
2)由于系统采用了各个独立的接收通道,而各个通道的幅相不一致,导致方位估计精度和分辨率变差。
为解决上述问题,本文提出了一种新型的雷达结构模型,缩减接收机通道,由单通道接收机代替多通道接收机。采用时分复用体制,这种结构模型,使用单个发射天线,多个接收阵元,各个接收阵元通过射频开关,时分复用连接单通道接收机。相对于传统多通道天线阵列模型,该模型电路结构大大简化,具有更低的成本,在降低了功耗的同时,可靠性大大提高。
1 雷达模型
为了准确阐述这种时分复用阵列雷达模型,从基本模型开始,到多通道阵列雷达模型,然后建立时分复用阵列雷达模型,再进行原理介绍,最后给出相关系统框架及模型。
1.1 基本调频连续波雷达模型
基本模型具有单个发射天线和单个接收天线、信号产生器、接收机以及信号处理模块组成,模型如图1所示。
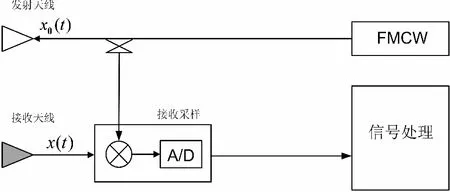
图1 基本连续波雷达系统框图
雷达发射的线性调频连续波(Linear FMCW, LFMCW)信号形式,采用锯齿波或者三角波对发射信号的频率维进行周期调制,另外可根据需要,增加一段点频连续波信号进行速度解算[2]。接收机接收回波信号与发射耦合信号进行混频,其调频连续波差拍原理如图2所示,图中显示了两者频率变化的相对关系,实线为发射信号,虚线为回波信号。

图2 调频连续波雷达的工作原理
雷达发射信号形式如式(1)所示,f0为发射信号的频率,B为调频连续波的信号带宽,T为发射信号的时宽。
(1)
假设场景内只有一个目标,则接收到的目标回波信号为
(2)
其中,a为接收信号的幅度,c代表光速,τ为接收到的目标信号时延,υ为目标相对于雷达的径向速度,R为目标在零时刻时,相对于雷达的初始距离。
雷达接收到的回波信号与发射耦合信号进行混频,得到其差拍信号形式为
(3)

(4)
由于B≪f0,V≪c,差频公式可以近似为
(5)
假如场景内有K个目标,式(5)可扩展为
(6)
1.2 多通道阵列系统框架模型
多通道阵列系统框架模型如图3所示,该系统具有多个同时接收阵列天线和一个发射天线,接收天线阵元对应多个接收通道。若系统有M个接收天线,M个接收天线接收到回波信号,进入M个接收通道,与发射耦合信号进行混频后通过M路AD采样,然后通过信号处理解算目标的距离、方位及速度。
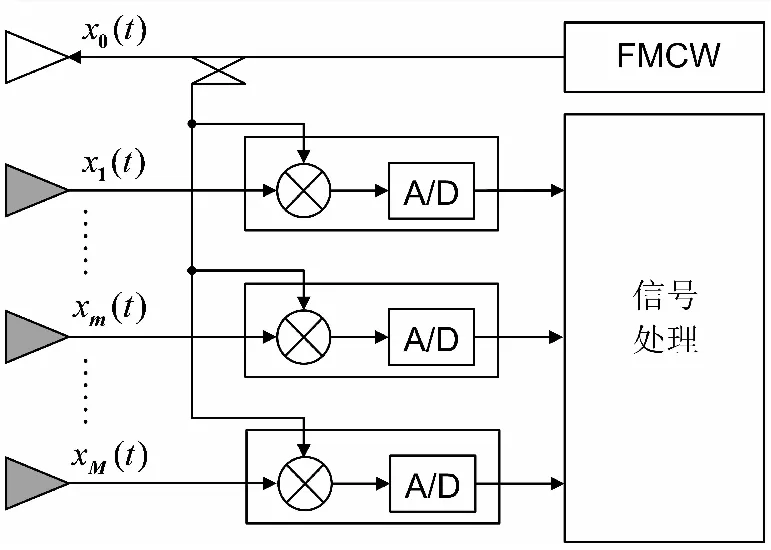
图3 接收多通道阵列雷达系统框图
(7)
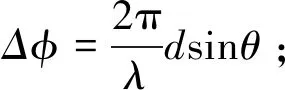
在方位角θ,第m个阵元接收到的信号回波为
xm(t)=ax0(t-tm)
(8)
(9)
(10)
因此,可以得出混频后信号为
(11)
将tm带入上式可得

(12)
假如场景内有k个目标,则式(12)可扩展为
(13)
我们可以将式(13)写成矩阵形式
Q(t)=A(θ)S(t)
(14)
(15)
(16)
对多个通道同时采样,共采集N个点,t=(n-1)Ts,n=1,2,…,N,得到的数据为Q(n)=A(θ)S(n) ,n=1,2,...N。该数据矩阵是用来对目标成像估计方位、距离、速度的数据基础。
1.3 时分复用阵列系统框架模型
时分复用阵列系统和多通道阵列雷达的区别在于,由M路接收机简化为1路接收机,原系统同时对M个接收天线混频后的信号进行采样,模型升级后如图4所示,依据一定的时序,对M个接收阵元的混频信号,通过高速开关,进行串行采样,M个接收通道共用一个接收机。
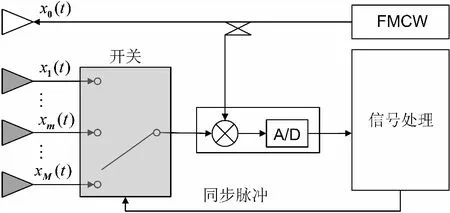
图4 时分复用阵列雷达系统框图
信号接收采样模型如图5所示。
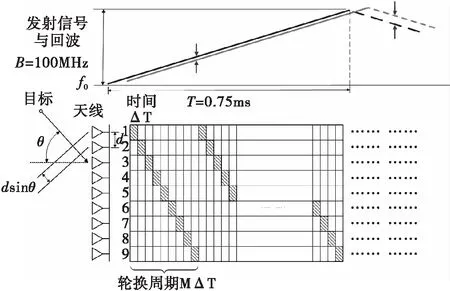
图5 多阵元分时接收模型
对其量化,假如在第m个阵元第n次循环,采样时刻为t={(n-1)M+(m-1)}Ts,带入到式(17)中
(17)
可得
(18)
重新整理可写为
Qn,m=
(19)
同样写成标准形式
Q(n)=A(θ,R)s(n)

(20)
(21)
α(θk,Rk)=
(22)
2 雷达组成
根据上述时分复用阵列系统框架模型,雷达系统由天线系统、射频开关矩阵、单通道接收机、频综模块及信号处理组成。其中,射频开关矩阵,根据一定的工作时序,切换16组接收天线的回波信号到接收机。信号处理模块、数据处理模块共用同一硬件平台,用软件实现不同的功能。其组成框图见图6所示。

图6 系统组成
天线系统与射频开关矩阵实物如图7所示。通过射频开关矩阵,依次接收天线回波信号,射频信号经接收机混频转换为中频模拟信号后,经AD采样后转换为14位有符号整型数;完成数字下变频、数据重排等处理;使用乒乓缓存接收数据,同时完成整型到浮点格式转换,进而进行距离维FFT、方位维FFT、恒虚警处理,经门限判决后,得出检测结果(目标距离和方位);并对三角波上升和下降阶段的检测结果进行配对,得出检测结果(目标距离、速度和方位),最后进行目标配对,解耦合处理,解耦合方法见文献[3],处理过程如图8所示。

图7 天线与射频开关矩阵实物图

图8 处理过程
3 接收机参数估算
3.1 接收机带宽估算
容易得到,相邻通道,在一次Ts采样间隔内,相位变化为
(23)
接收到的信号频率实际为
(24)
若取最大扫描角θ为10°,Ts取10 MHz,单频信号频率取最大值0.36 MHz,可以计算出Δf=2.96 MHz,如果Ts取20 MHz,Δf=5.56 MHz。
3.2 射频开关切换速率
该雷达系统设计调频带宽B=400 MHz,调制周期T=1.5 ms。传感器的距离覆盖范围为5~200 m,相应的回波时延为0.033~1.33 μs。
fmax=k·τmax+fdmaxfmin=k·τmin-fdmax
(25)
其中:fmax为最大拍频,fmin为最小拍频,k为调频斜率,fdmax为最大多普勒频偏,容易计算出
fmax=400 MHz/1.5 ms·1.33 μs + 7.7 k=0.36 MHz
fmin=400 MHz/1.5 ms·0.033 μs - 7.7 k=2.4 kHz
最大拍频为0.36 MHz,根据采样定理,Fs是由最大拍频决定的, 为了避免频谱混叠,Fs必须大于最大拍频的两倍,单个通道的采样率至少为信号频率2倍关系。系统设计了16组阵列天线,共用一路接收机,高速在16个接收通道循环采样,通道间切换速率为:0.36×2×16=11.52 MHz。工程实现中,目前射频开关切换速率可达到10 MHz,由其影响的作用距离约为175 m左右。
4 信号处理流程
4.1 AD采样
AD变换器对输入信号在时间上等间隔采样,并将采样得到的信号在幅度上量化,从而将模拟信号转换为数字信号,以便进行数字处理。AD变换器的采样频率应满足Nyquist采样定律,即采样频率应大于输入信号最高频率2倍以上,才能避免采样引起频谱混叠。考虑到经开关、混频后的接收信号带宽为10 MHz,采样率应大于20 MHz,此处选取40 MHz的采样率以满足信噪比改善因子和中频采样要求。
将AD采样的数据按照接收天线数据进行重新排列,假设有16组接收天线,采样后根据采样时刻将接收到的数据重排为16组,排列后如图9所示。
4.2 距离维成像
对于重排后的每一路信号,按照图10所示的流程对数据分组作FFT,然后进行合并,获得距离维成像结果。各个接收天线数据做FFT,获得距离维成像结果。

图9 采用数据重排示意图

图10 距离维成像流程图
4.3 方位成像
方位维成像有两种方式:一种是数字波束合成,利用FFT实现,计算量小,但角度分辨力较低;另一种是构建Capon空间滤波器,如图11所示,需要估计自相关矩阵并进行矩阵求逆,角度分辨力较高,但计算量很大。
数字波束合成可以看做是检测信号的空间频率,对同一距离单元上的16个数据作FFT,获得方位维成像结果,为了使方位精度达到1°,补零作32点FFT(方位精度为1.220°)。
Capon波束形成,其波束形成系数向量形式为式(26),其中R是观测的快拍向量Q(n)的自相关矩阵。自相关矩阵利用待检测距离单元左右邻近4~5个距离单元的数据(目标约覆盖4~5个距离单元)进行估计。
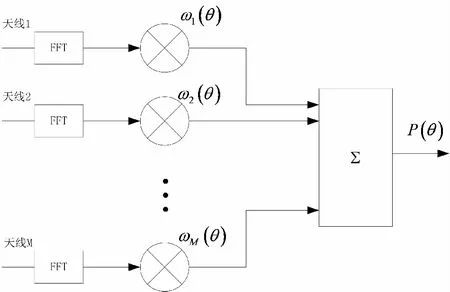
图11 Capon空间滤波器
(26)
各天线接收数据分别经过FFT进行距离维成像后,对于不同的角度θ进行波束形成系数加权并求和,得到该方位上的能量估计。
ω(θ)=[ω1(θ),ω2(θ),…,ωM(θ)]T
(27)
4.4 目标检测
在没有干扰背景统计分布的先验知识时,可采用非参数CFAR检测器:两侧单元平均选大电路即 GO-CFAR。在被检测单元两侧各选取M个单元,分别求这M个单元的均值,两者选大后输出,乘以门限乘子K作为检测门限。在工程应用中,通常选择两侧单元数为8或16个,被检测单元的左右邻近2~3个单元不参与本单元的恒虚警率门限产生统计,以免目标信号自身(一般目标可能占到三个距离单元)对恒虚警率门限产生影响。
4.5 目标凝聚
最后再对检测出的目标进行点迹凝聚,由于目标可能会跨越相邻的几个距离单元,对于经过CFAR处理后过门限的相邻的距离单元按质心法进行凝聚处理,如图12所示。
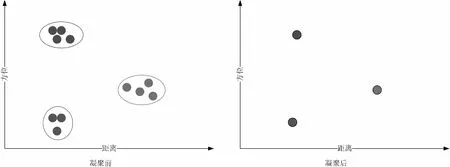
图12 目标凝聚
凝聚准则:对相邻单元的目标按式(27)凝聚成一个目标;对出现在不相邻单元的目标报告认为是两个不同的目标。
5 仿真分析
仿真场景中分布了5辆汽车,每辆车设有5个散射点。其中第1辆车:距离70 m,距离中线4 m,车宽2.5 m,车长10 m;第2辆车:距离30 m,距离中线2 m,车宽2 m,车长6 m;第3辆车:距离40 m,距离中线-4 m,车宽2 m,车长6 m;第4辆车:距离180 m,距离中线-4 m,车宽2 m,车长6 m;第5辆车:距离180 m,距离中线4 m,车宽2 m,车长6 m。车辆速度分别为20 m/s、25 m/s、-20 m/s、-15 m/s、10 m/s。
以第一辆为例,根据车辆起始位置,车辆宽度、长度计算车辆的5个散射点相对于雷达的距离与方位:
car_start_x = 70; car_start_y = 4; car_width = 2.5; car_length = 10;
range = start_x+[0,0,car_length/2,car_length,car_length];
azimuth=atand(car_start_y+[0,car_width,car_width/2,0,car_width])./car_range。
接收信号的表达式为x(t)=x0(t-Δt),此处Δt为车辆第K个散射点,相对于第M个天线阵元的回波时间,可通过该散射点距离方位(range,azimuth)与天线阵元相对关系获得,延时为:tstart = 2×Range(Kidx)/c+(Midx-1)×d×sind(Azimuth(Kidx))/c,根据此延迟时间构建接收信号。发射与回波信号的时域图如图13所示。
将回波信号与发射信号进行混频,得到多个点频信号,进行FFT运算得到距离成像。混频及FFT运算结果如图14所示。
其次,对所有通道的距离成像数据叠加,再进行方位成像结果如图15所示。

图13 发射与回波信号
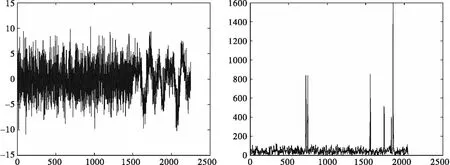
图14 距离成像(此频域代表距离)
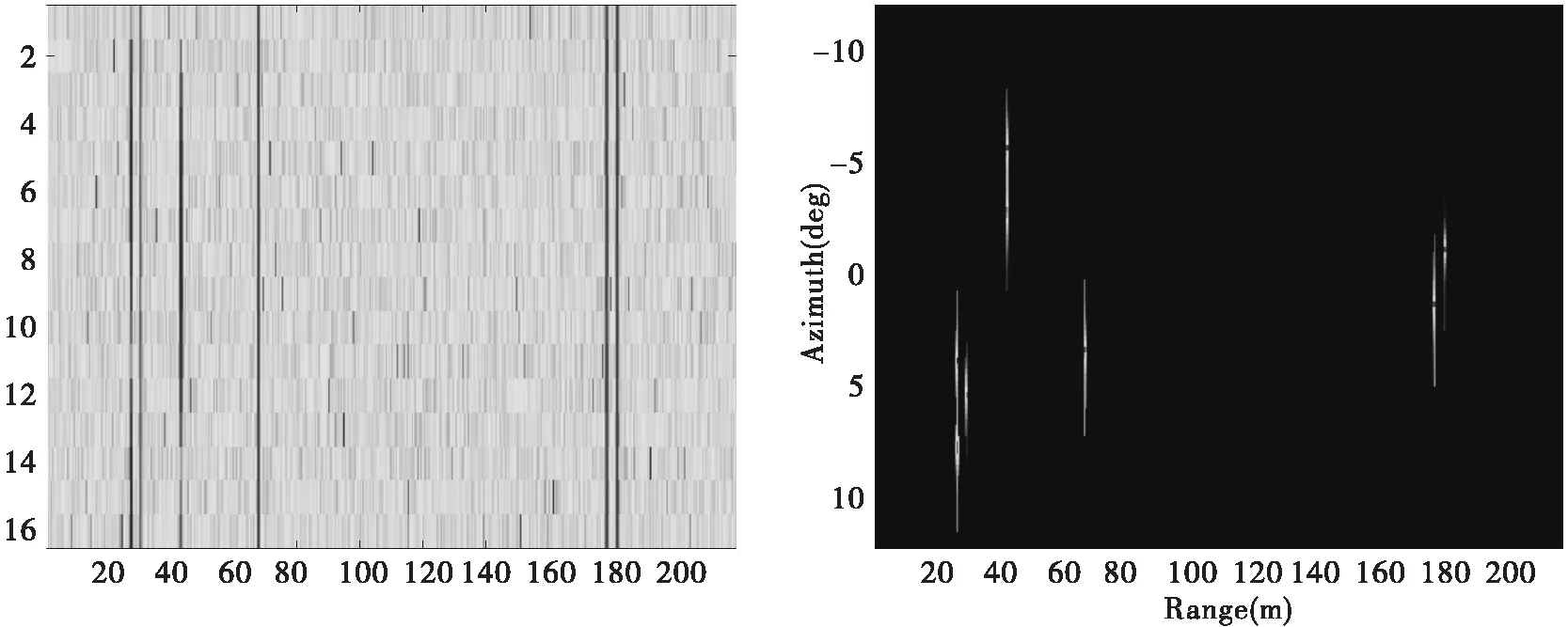
图15 全部通道-距离成像及方位成像结果
最后,对目标进行检测,再进行凝聚,如选取道路护栏宽度为16 m,进行绘制护栏与目标,如图16所示。
6 试验结果
试验样机装配调试完成后,在试验场(见图17)、郊区田野(见图18)、国道(见图19)、城市道路(见图20)及某基地靶场(见图21)进行各项试验。试验期间,对雷达的工作模式,距离范围、方位角范围,平台行驶速度,距离精度、方位精度,方位分辨率等指标进行了测试,均符合设计指标要求。
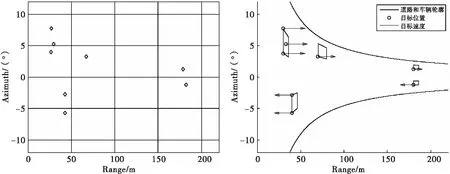
图16 目标测试结果及道路绘制
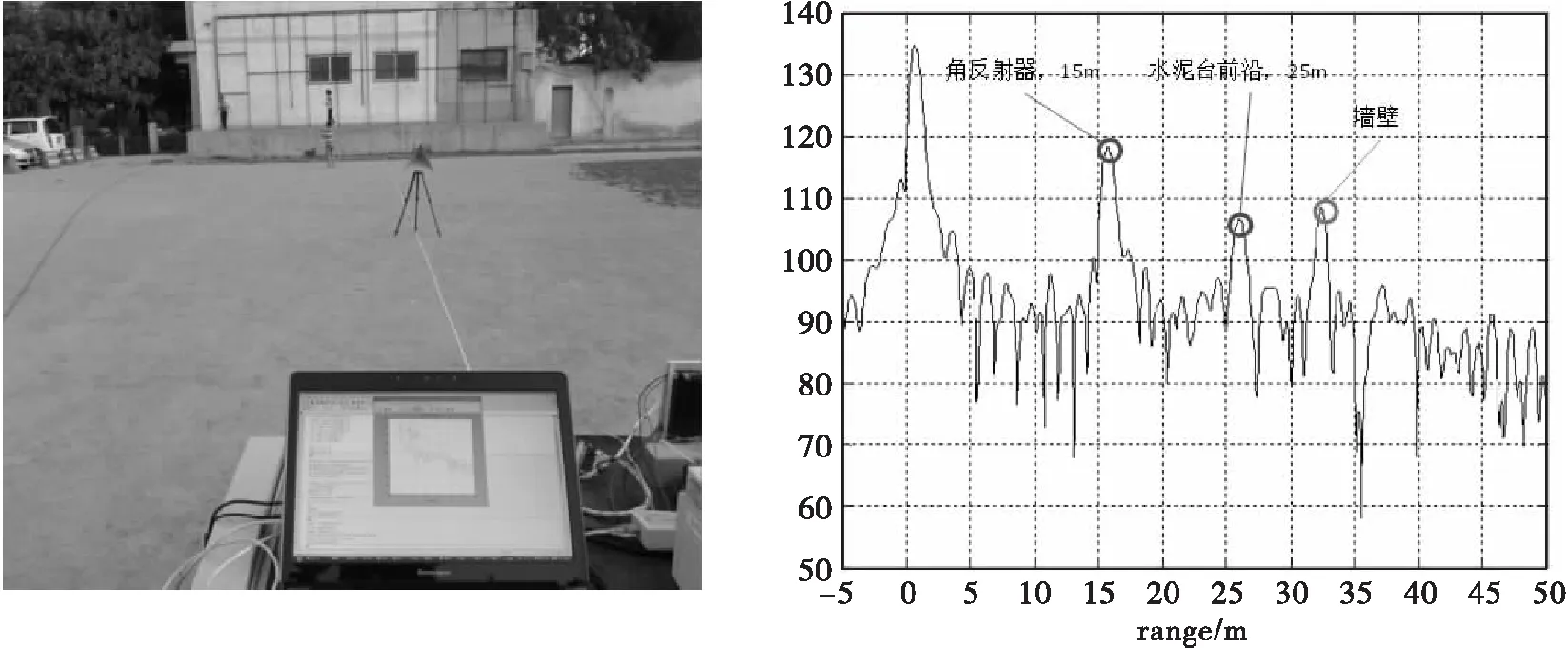
图17 角反射器探测试验
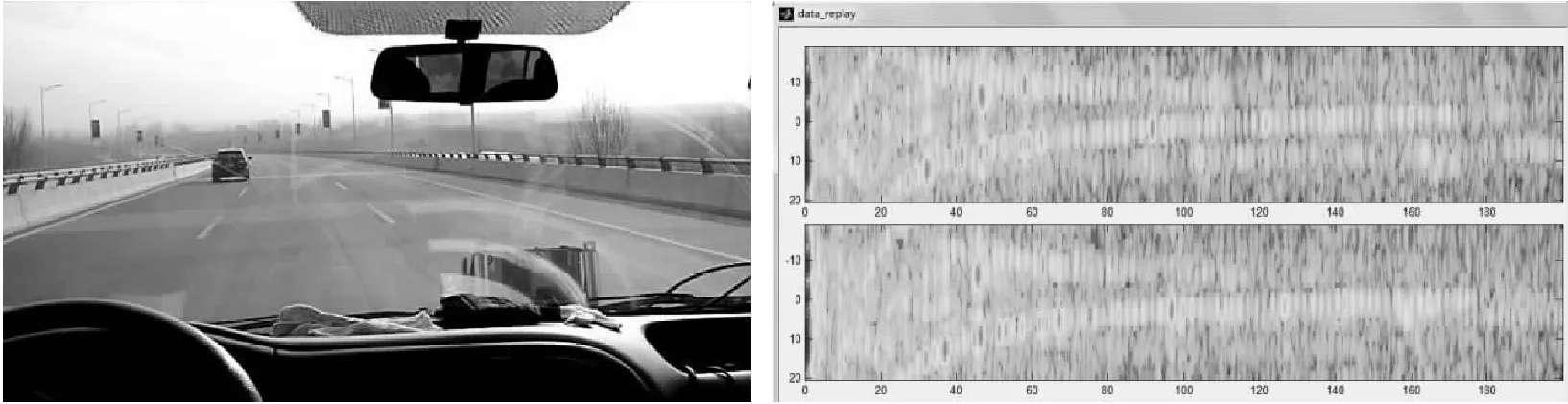
图19 公路两侧护栏探测
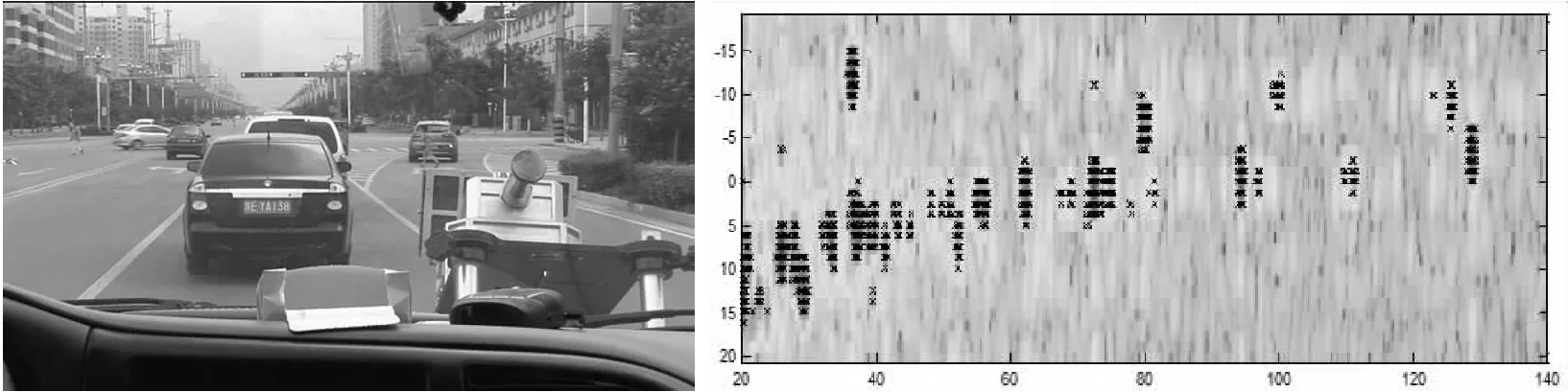
图20 城市环境跑车试验
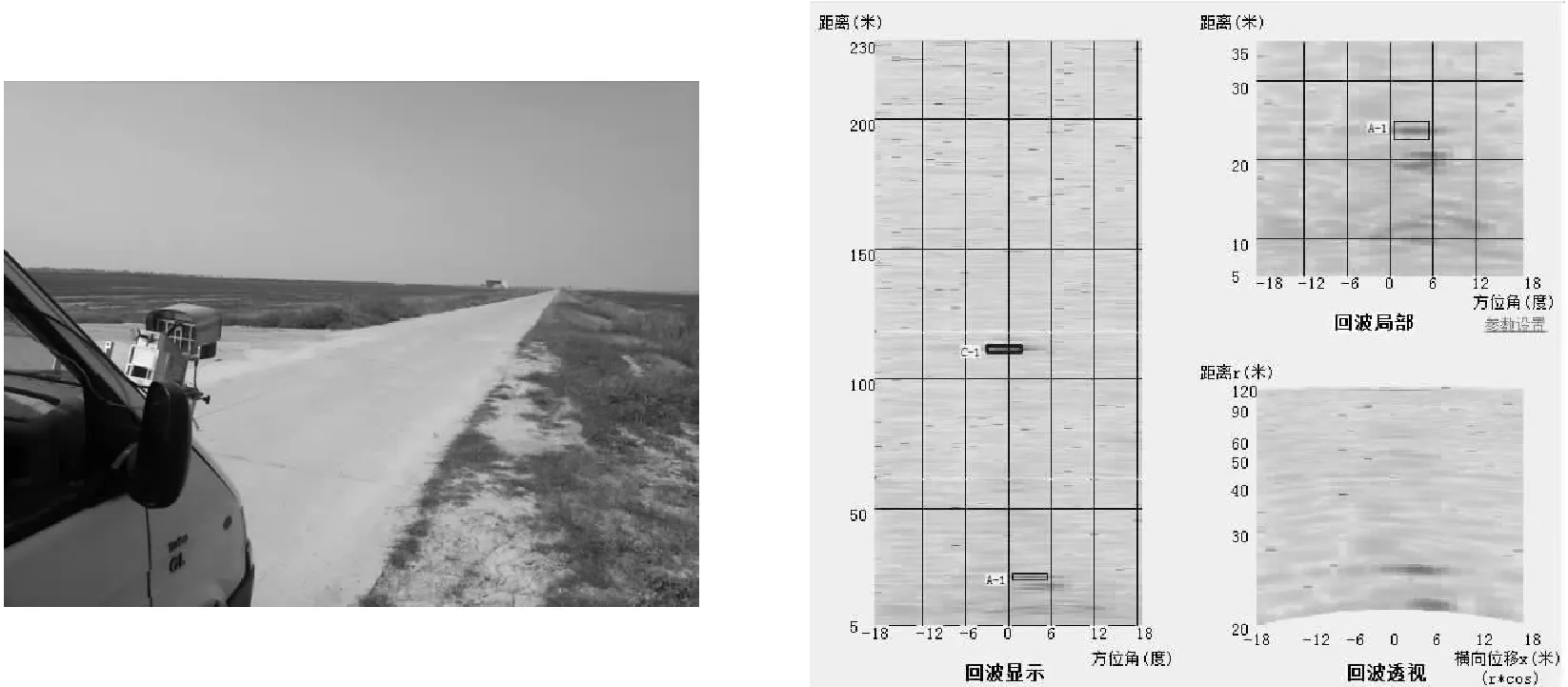
图21 单目标运动车辆跟踪试验
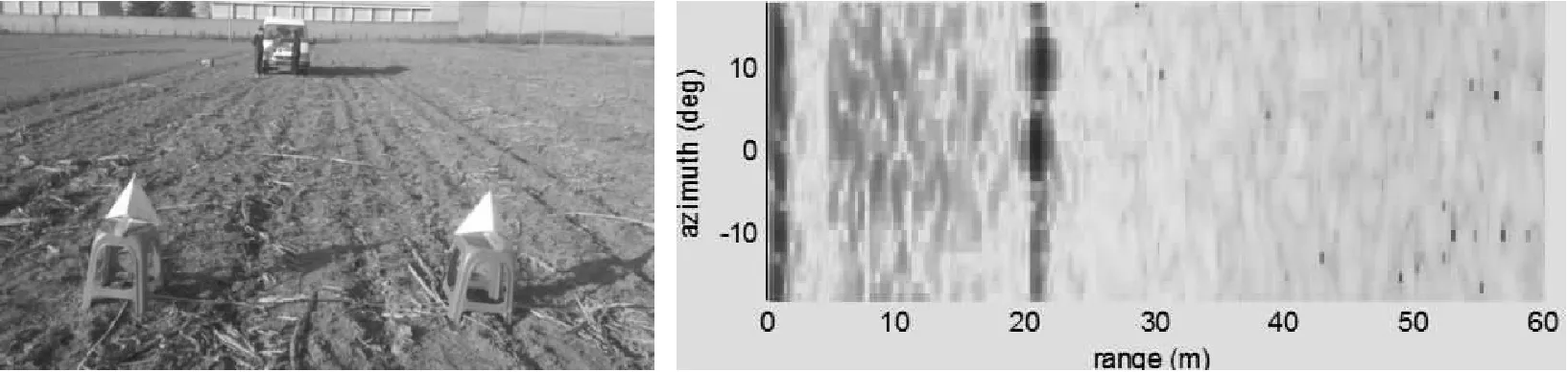
图22 方位分辨率测试
7 结束语
文章阐述了一种车载前向防撞雷达方案,建立了一套时分复用阵列体制的系统模型,该模型具有多个接收天线,通过射频开关按照一定的时序共享一个接收通道,大大精简了系统的体积和成本,雷达进行了跑车试验,开展了性能验证,主要指标达到预期效果,该方案对于小型化雷达设计提供了一种方法与思路,具有较强的可行性和工程使用价值。
