基于空间体系的制导优化方法研究
2020-10-13李重远樊姣荣刘小旭杜大程
李重远,樊姣荣,刘小旭,杜大程
(1. 北京宇航系统工程研究所,北京,100076;2. 中国运载火箭技术研究院,北京,100076)
0 引 言
太空优势是衡量国家实力、确立国家地位的重要标志,也是维护国家发展利益的重要支撑。从美国研制天基太空监视系统(Space Based Space Surveillance,SBSS)、多次开展X-37B 飞行试验、研制轨道快车计划、凤凰计划等,可以看出美国空间体系发展思路,在于全面推进空间态势感知系统发展,重点完善空间态势感知装备,对关键技术进行飞行试验验证,系统化构建空间技术体系,并且分批次、有重点地生成空间技术能力。当前,美国在空间体系研究方面占有明显优势,但仍然处在发展过程中,开展空间体系应用方面研究对于中国增强空间力量具有重要意义。本文重点针对空间体系的构成,以及基于现有空间体系能力约束下的技术研究,针对空间应用过程中,目标飞行器突然机动规避的常见应用场景,解决空间平台中途实时规划最优途径的问题。
1 空间体系构成
1.1 态势感知系统
态势感知系统是空间体系的源头,能够提供图像、信号、测量与特征提取情报,对情报进行快速融合处理,并将情报传递至指挥控制系统。态势感知传感器是执行发现、识别、确认、监视、跟踪、定位及获取目标其他信息等态势感知任务的核心装备。态势感知过程分为4 个阶段:发现(感知目标,提取出目标信息)、区分(确定目标的种类)、识别(提取目标的细微特征,对目标进行详细辨认)、定位(在一定的精度下,给出目标的位置)。
1.2 指挥控制系统
指挥控制系统是空间体系的依托,能够随时接收态势感知信息,对空间平台进行有效、可靠、不间断的指挥,能够实时、准确地监控空间平台的运行状态,指挥空间平台执行相应任务。指挥控制系统具备与信息感知节点的通信接口,可收集各方面信息,并对信息进行融合处理,生成任务方案。并且能够在任务执行过程中,实时监视空间平台和目标飞行器状态,当目标出现变化时,对任务进行实时规划。指挥控制系统是空间体系形成信息流闭环的关键节点[1]。
1.3 时间链
空间体系内信息呈现双向流动的特点,如果目标飞行器具有时敏特性,需要空间平台具备较强的快速反应能力,要求态势感知系统和指挥控制系统密切配合,因此信息及时、可靠传递是空间任务顺利实施的基础。空间体系时间链如图1 所示。

图1 空间体系时间链Fig.1 Time Chain of Space System
由图1 可以看出,空间体系从发起指令到平台机动约200 s,如果目标实施规避机动,平台再次发起机动中途优化,体系反应时间约180 s。
2 制导优化方法
2.1 应用背景
目标飞行器位于中地球轨道(Middle Earth Orbit,MEO),空间平台位于中地球转移轨道(Medium Earth Transfer Orbit,MTO),有任务需求时,空间平台机动至目标飞行器附近。空间应用过程中,目标飞行器突然机动规避离开MEO,空间平台快速反应再次发起机动中途优化,过程如图2 所示。
图2 所示的空间应用过程,结合态势感知系统和指挥控制系统的密切配合,基于空间体系时间链分析空间平台制导优化方法,是本文重点研究的应用背景。
图2 空间应用过程Fig.2 The Optimization Guidance of Target Spacecraft with the Emergent Maneuver
2.2 中途优化过程
空间应用过程中,目标飞行器突然机动规避离开工作轨道,此时需要态势感知系统对目标飞行器进行快跟踪定位,具体过程如图3 所示。
图3 中途优化过程Fig.3 The Midcourse Optimization Guidance Process of Space Platform
从图3 可见,指挥控制系统需要开始进行信息处理,结合态势感知系统对目标的轨道位置推算,预测空间应用位置,并进行任务重规划,优化出空间平台再次发起机动的时刻T(对应的位置矢量为r0),使得空间平台从r0飞向的Δv1最小,即找到最佳起始点r0。优化空间平台用时间 t 从r0飞向所应该具有的速度v1和v2。空间平台在r0处速度应该为v0,在目标位置矢量为处速度应该为,但是要在规定时间t 从r0飞向,r0处的速度就应该为v1,处的速度就应该为 v2,所以中途修正需要改变速度,变轨速度Δ v1= v1−v0, Δv2= v2−[3]。空间平台可以有无限条路径从r0飞向,所以还需要优化从r0飞向所需的时间t 使得Δv1最小,也就是说从r0飞向所需的时间t和空间平台在轨道上的飞行时间T 都对Δv1有影响,需要同时优化t 和T,使得Δv1最小[4]。
2.3 末制导算法
空间平台动力学模型如下:

式中 a (t )为从当前到入轨时刻平台加速度预估值。
由于:m × aeye= Imp× m˙ ,其中,aeye为视加速度,可得:

式中 τ 为时间常数。
将式(4)代入式(2),可得:

式中 tc为平台从当前位置到入轨时迭代制导总时间。
式中 L 为从当前到入轨空间平台视速度增量预测值。
式(6)中的重力加速度积分无法给出解析解,因为重力加速度是未知俯仰偏航角和的函数。所以在此进行如下简化处理[5]:
由此可推出末制导俯仰和偏航程序角计算方法[6]:
3 优化设计结果
目标飞行器位于MEO,空间平台位于MTO,目标飞行器和空间平台轨道参数如表1 所示。

表1 轨道参数Tab.1 Orbital Parameters
空间应用过程中,目标飞行器突然机动,半长轴增加50 km 规避,如果空间平台仅末制导跟踪目标飞行器,空间平台末制导俯仰和偏航程序角如图4 所示。平台能量消耗和入轨精度如表2 所示。
表2 平台能量消耗和入轨精度Tab.2 Platform Energy Consumption and Orbit Accuracy
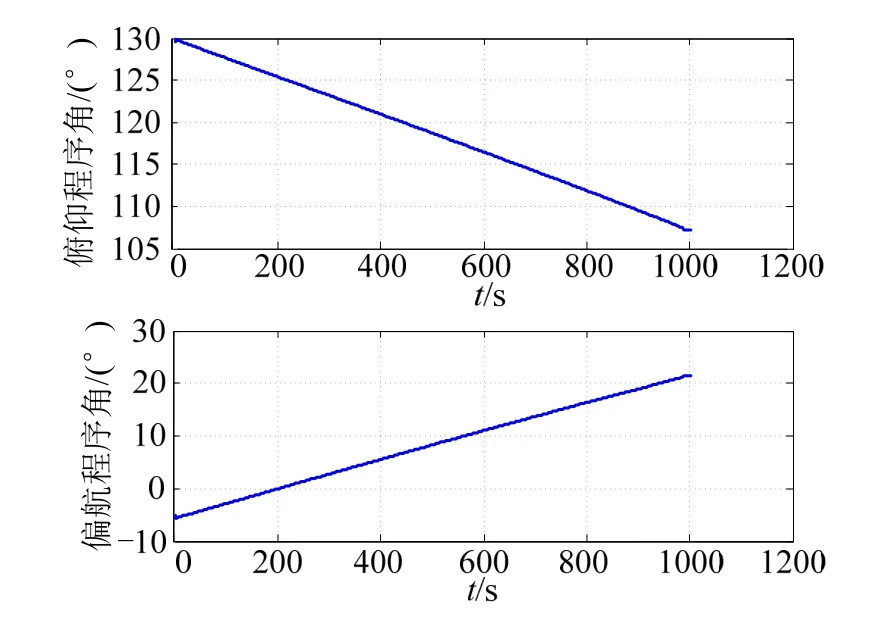
图4 空间平台末制导俯仰和偏航程序角Fig.4 The Space Platform Pitch Angle and Yaw Angle in Terminal Guidance Phase
空间应用过程中,目标飞行器突然机动,半长轴增加50 km 规避,空间平台在态势感知和指挥控制系统的配合下,考虑180 s 体系反应时间,再次发起机动中途优化,最后空间平台末制导抵近目标飞行器,俯仰和偏航程序角如图5 所示。平台能量消耗和入轨精度如表3 所示。
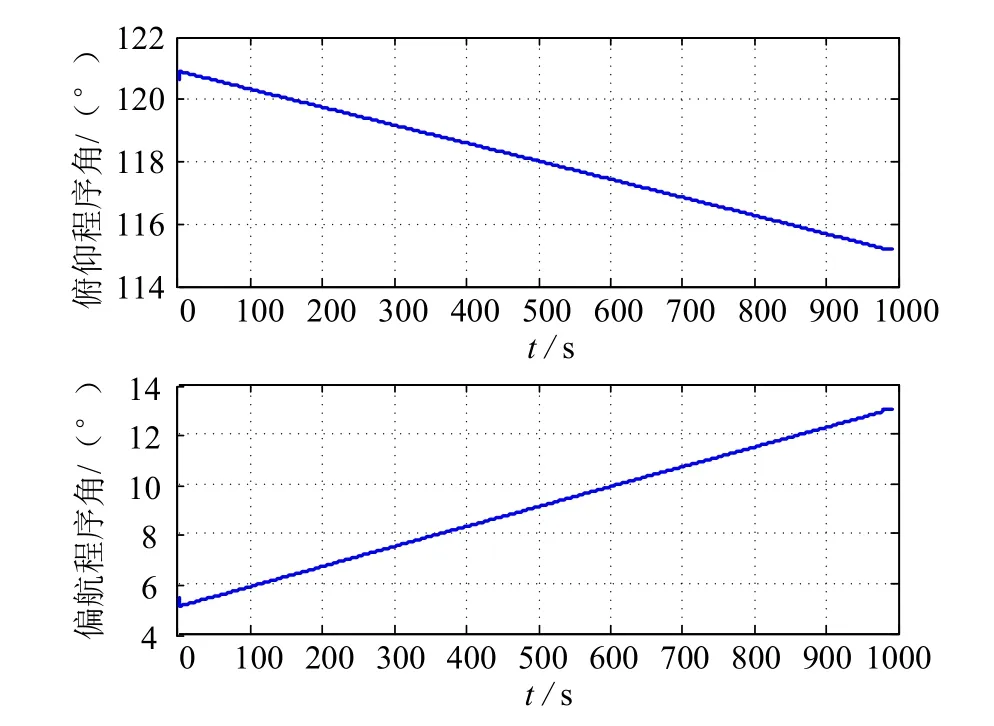
图5 增加中途修正后空间平台末制导俯仰和偏航程序角Fig.5 The Space Platform Pitch Angle and Yaw Angle in Terminal Guidance Phase after Midcourse Optimization
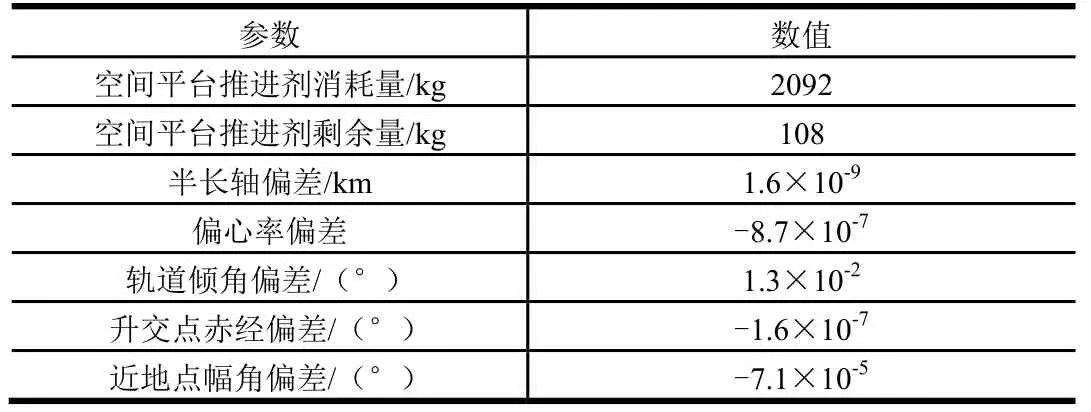
表3 增加中途修正后平台能量消耗和入轨精度Tab.3 Platform Energy Consumption and Orbit Accuracy after Midcourse Optimization
对比表2 和表3 结果可知,针对目标飞行器突然机动规避的应用场景,在末制导精度相当的情况下,增加中途优化为空间平台节省了72 kg 推进剂。
4 结 论
空间平台长期在轨所携带的推进剂量是制约空间制导优化方法的重要因素,通过对空间平台制导优化方法的研究,针对空间应用过程中,目标飞行器突然机动规避的常见应用场景,提出了空间平台中途实时规划最优途径的方法,减轻了末制导压力,实现了空间平台推进剂剩余量的提升,为信息传递时间链合理、空间平台携带能量可行的空间体系建设奠定了基础。