C-V2X技术在高速公路中的应用
2020-10-12李士东潘景剑魏永利
李士东 潘景剑 魏永利
摘要:针对车路协同应用场景,对蜂窝车联网(C-V2X)技术进行了简单说明,分析了传统高速公路在安全、效率及服务方面存在的问题。针对C-V2X在高速公路中的融合应用方案进行了详细说明,提出了基于C-V2X车路协同与路网智能控制系统设计方案,详细阐述了系统软件架构,介绍了为高速公路提供的4种业务场景。通过实际示范路段的测试验证,证明了系统设计的可行性和合理性。
关键词:蜂窝车联网;车路协同;车联网
中图分类号:TP311文献标志码:A文章编号:1008-1739(2020)17-57- 5

0引言
当前,我国高速公路管理已经达到一定的智能化水平,基本实现了高速公路的可视、可监、可管、可控。但相对发达国家,我国高速路网在行驶安全、通行效率及出行服务等方面,仍存在较大的改进需求和提升空间。
C-V2X技术是基于3GPP全球统一标准的车联网(Vehicle to Everything,V2X)无线通信技术,包括基于LTE移动通信技术演进形成的LTE-V2X/LTE-eV2X技术,以及基于5G NR平滑演进形成的NR-V2X技术[1]。基于C-V2X车路协同是指采用先进无线通信和新一代互联网等方式,实现人—车—路—网全方位动态实时信息交互的智能交通技术。车路协同在全时空动态交通信息采集与融合的基础上,借助车辆协同安全和道路协同控制技术,能够有效保证交通安全、提高通行效率,在高速公路领域具备广泛的研究价值和应用前景。
1传统高速公路存在的问题
我国高速公路运营里程已达149 600 km,未来高速公路的主要任务是从已建成的路网上挖掘潜力,提升路网运输能力,目前仍需解决的问题主要包括以下3个方面:
①路网安全:近年来我国道路交通事故、伤亡人数和直接损失一直呈上升趋势,随着汽车化程度越来越高,带来的交通安全问题也会不断上升。路网安全与道路设计、交通流量、司机驾驶行为及路况条件等众多因素紧密相关,单一手段无法有效解决。
②路网效率:路网通行效率直接关系到路网通行费用营收,间接关系到整个社会的经济运行情况。不良天气、交通事故因素影响通行效率问题一直缺乏有效的解决手段。以北京为例,2016年由于雾霾天气原因封闭高速时长达114 h,严重影响路网通行效率。
③路网服务:随着技术的进步,交通出行已不再是简单的位置搬移,未来出行将变成除工作、家庭生活以外的第三生活空间,出行者在追求安全、高效的同时,愈发关注交通出行过程体验。随着自动驾驶技术的进步,司机双手有望得到解放,这会带来更多的出行服务需求。
2 C-V2X技术分析
3GPP已完成基于LTE的C-V2X标准研究,并在多场景实现应用落地,面向5G的C-V2X标准正在研究中,C-V2X是唯一具有清晰路径向5G演进的V2X通信技术[2]。
国外主流V2X通信技术包括专用短程通信(Dedicated Short Range Communication,DSRC)技术和C-V2X技术。美国、欧洲和日本于20世纪90年代开展了基于DSRC的研究,目前部分国家虽然早期支持DSRC技术,但多数国家同时也在逐渐开展C-V2X应用研究,美国已分配C-V2X专用频谱,进行C-V2X技术探索。
我国确定了按照车路协同技术路径积极推动自动驾驶的发展。中国通信标准化协会、IMT-2020(5G)推进组、中国公路学会等机构大力推进C-V2X关键技术可行性研究、行业标准编制及应用示范等工作。从政策层面看,C-V2X技术在国内智能交通领域有着良好的发展前景[3]。
C-V2X通信能力示意图如图1所示。

C-V2X将人—车—路—网及周边环境数据紧密融合,通过车—车(V2V)、车—路(V2I)、车—人(V2P)及车—网(V2N)信息交互和共享,实现车和基础设施之间智能协同与配合,为智能交通管控、车辆智能控制和智能动态信息服务等业务提供有力支撑。C-V2X第1阶段支持场景定义如表1所示。

3 C-V2X高速公路应用方案设计
基于C-V2X车路协同技术可实现道路的数字化、网联化、智能化。以“聪明的车”和“智慧的路”相互辅助可有效提高出行安全、通行效率和服务能力。
3.1系统设计
C-V2X实现路侧单元(Road Side Unit,RSU)與车载单元(On Board Unit,OBU)之间的信息有效交互,使路侧信息更好为车服务,让道路参与者共享实时路况信息,实现真正的人—车—路—网协同智能[4]。基于C-V2X车路协同与路网智能控制系统结构图如图2所示。
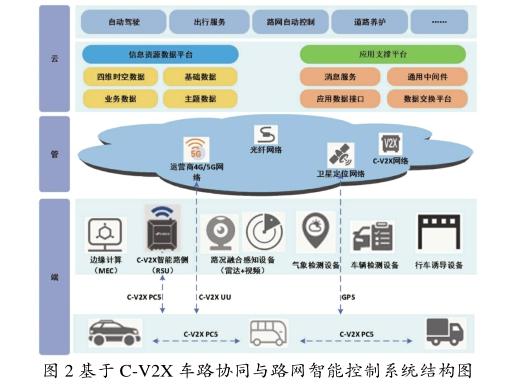
系统架构可分为云、管、端3层。
①云:由高速路网数据中心和业务平台构成,数据中心可以分级建设。业务平台包括信息资源数据平台和应用支撑平台2个基础支撑平台,以及建立在基础支撑平台之上的一个应用业务平台。其中2个基础支撑平台提供数据存储、汇聚、计算及决策等处理,并为应用层提供服务;应用业务平台向路侧管理方和一般出行者提供路网主动控制、道路养护、自动驾驶及出行等服务。
②管:包括C-V2X网络、运营商4G/5G网络、卫星定位网络及光纤网络等,实现端侧数据信息和云侧控制信息的传输。

③端:包括车载终端及路侧交通基础设施各种智能化终端。车载终端主要是C-V2X OBU设备,实现与路侧C-V2X RSU设备的协同通信;路侧智能感知终端包括摄像头、激光雷达及毫米波雷达等,实现路网交通态势的智能感知,并将感知结果通过V2X链路传递给车辆进行辅助决策[5];边缘计算结合路侧智能感知结果可为车辆提供超视距路况感知能力,有效弥补车辆自身感知距离不足的问题。
3.2软件架构
基于C-V2X车路协同与路网智能控制软件架构,如图3所示。
系统软件架构主要包括RSU、路侧感知模块、车路协同边缘计算和业务平台4个部分。
(1)RSU
针对高速、大密度路网复杂交通环境通信场景,实現车辆运动状态与信道环境兼顾的C-V2X链路信号传输策略,感知网络拥塞并控制,解决高速大密度交通场景中无线网络资源利用与拥塞问题。
(2)路侧感知模块
使用多源传感器实现道路环境信息有效感知,利用人工智能及深度学习方法完成多源多维异步异构数据融合,实现交通场景语义理解和动静态目标检测、分类与跟踪,构建3D交通运行路况场景[6]。
(3)车路协同边缘计算
实现综合路况及交通流信息精准掌控,提高三维空间的理解能力,实现路况实时感知信息与高精度地图融合,通过拓扑、姿态、色彩及语义等特征提升定位能力,构建基于静态高精度地图的全息动态路况场景,实现全息动态路况对辅助/自动驾驶的支撑[7]。
(4)业务平台
业务平台通过接收实时交通状态感知数据以及基于交通仿真的交通流运行状态预测数据,形成交通管控模型策略,实时优化协同控制方案,实现车辆行驶间信息交互和行为协同,提升交通运行效率和交通安全,并为交通出行者提供自动驾驶引导和出行服务,为交通管理者提供道路养护服务。
4业务场景
4.1超视距感知
高速公路车速较快,车辆所需的安全距离较远,而驾驶者及车载端传感器极限感知能力只有100~200 m,无法满足安全距离要求。
系统借助路侧智能感知设备,可主动获取近千米范围内的背景车辆、倒车逆行、紧急停车、行人闯入、抛洒物、道路施工、路面坑洼及交通事故等全局路况数据和特殊事件,这些数据经过处理和分析后生成相应的警示信息,实现路—云上报并通过C-V2X网络广播给接近的车辆,提醒其提前决策,有效增强行驶的安全性。
4.2全息隧道
由于感知盲区及肉眼视距限制等原因,高速隧道进出口交通事故频发。路侧智能感知设备可全息感知隧道出入口的实时态势、拥堵、应急事件等异常因素,并提前通知即将进入或驶出隧道的车辆,能够有效解决道路安全及交通效率问题,同时也提升了交通监测与管理能力。
隧道入口容易造成黑洞效应形成视野盲区,在隧道入口处安装感知设备,感知隧道口附近障碍物及异常车辆等,提前将异常信息通过V2X发送给接近车辆;隧道出口容易形成白洞效应形成视野盲区,在隧道出口处安装感知设置,感知隧道出口外的环境,将异常情况通过V2X发送给接近隧道出口的车辆,提高行车安全。
4.3全息匝道
高速干道的汇入汇出无论对于普通车辆还是自动驾驶车辆来说,都是交通事故高发地段并影响高速通车效率。
高速公路匝道汇入口车流量大、行车视距小,车辆汇入时存在较大的单车感知盲区,变道易导致碰撞,在汇入区域部署路侧感知系统,并将感知数据高度融合,通过V2X实时发布,辅助车辆进行行为决策。高速公路匝道出口存在大量车辆连续变道、紧急刹车及逆行等危险驾驶行为,通过在匝道汇出口部署路侧全息感知系统,能实时检测车辆的速度、位置等信息,以及异常停车、紧急变道等事件,提前将异常情况或超视距信息通过V2X发送给相关车辆,降低事故风险。
4.4车道级高精度定位
全路段动态高精度定位是面向智能出行需求最基础的支撑,为了给车辆提供车道级精准定位,系统提供路侧高精度差分定位和车载视觉辅助定位2种方式提高定位精度。RSU内置RTK定位系统,可以作为高精度定位基站,通过V2I方式对行驶车辆提供差分定位服务。同时利用深度学习技术,通过车载摄像头与雷达融合实现车道线与道路边界的检测,从而进行车道级辅助定位。
5测试验证和结果分析
设计方案经过实验室验证测试后,在石家庄新元高速5km车路协同示范项目上应用并进行了实际工程项目的测试验证。
(1)V2X场景验证
在示范路段进行了V2V 8个场景和V2I 9个场景的测试验证工作,在高速移动、大车流路网场景下对C-V2X的通信时延等性能指标进行了测试,实测结果如图4所示。RSU高度为7 m,数据包为400 Byte,零丢包率情况下实际覆盖半径大于500 m,时延小于25 ms,发送频率为10 Hz,满足标准及设计要求,场景提醒准确无误,可辅助车辆驾驶,提升出行的安全性。

(2)路侧智能感知
在示范路段采用激光雷达与摄像头融合感知技术,可实现路面动静目标的提取,包括背景车辆及障碍物等,目标解析时延在5 ms内,定位精度在20 cm内,广播平均时延小于25 ms,满足目前网联车辆的辅助提醒和自动驾驶车辆的辅助判决要求。
通过上述实际工程验证测试,证明了方案的合理性及工程可行性,为后续深入研究打下良好基础。
6结束语
目前LTE-V2X是C-V2X采用的主流技术方案,由于能够更好地发挥现有移动蜂窝网的优势,提供更广范围的业务服务,备受全球电信运营商和汽车企业的关注。随着蜂窝通信技术的不断发展,LTE-V2X也将向NR-V2X技术方向演进。基于5G新空口及网络切片技术,低时延、高可靠通信将被支持,可用于實现自动驾驶等更加丰富的车联网应用业务。
未来自动驾驶离不开C-V2X,从感知、认知到直接告知,通过车路协同化繁为简来降低单车成本会更经济。车联网是一个新战略的制高点,我国高度重视车路协同技术与产业发展,并将其纳入《中国制造2025》《交通强国建设纲要》以及交通运输部智能交通系统发展战略,智慧交通可提高出行获得感,但这也将对传统交通运输模式形成颠覆,所以一是要加强跨行业协作,统筹规划车路协同发展;二是加快LTE-V2X部署,积极探索商业模式,明确运营主体;三是政策法规促进C-V2X应用,才能推动整个产业的健康发展。
参考文献
[1]中国信息通信研究院.车联网白皮书: C-V2X分册[EB/OL].(2019-12-26) [2020-03-11]. http://www.caict.ac. cn/kxyj/qwfb/bps/202001/t20200102_273007.html.
[2]于润东,余冰雁,李新洲,等.C-V2X标准化进展与测试验证[J].信息通信技术与政策,2018 (7):61-65.
[3]和福建,田晓笛,王长园.车联网发展现状及趋势研究[J].中国汽车,2019(4):55-58.
[4]宋蒙,刘琪,许幸荣,等.C-V2X技术在智能网联行业中应用探讨[J].中兴通讯技术,2020,26 (1):60-63.
[5]南洋,董馨,陈博,等.C-V2X技术在智能网联汽车上的应用场景研究[J].汽车文摘,2019 (9):8-12.
[6]董振江,古永承,梁健,等.C-V2X车联网关键技术与方案概述[J].电信科学,2020,36(4):3-14.
[7]董馨,南洋,陈博,等.C-V2X应用场景的算法建模及评价模型综述[J].汽车文摘,2020(5):13-17.
