基于AV890车载机的车联网智能终端
2015-07-21周开利陈戎张建明赵志越
周开利+陈戎+张建明+赵志越

摘 要:提出了基于AV890车载机的车联网智能终端解决方案,以汽车防盗报警系统为应用实例,实现了越界报警和车窗玻璃振动与破碎报警,当发生警情时,可以远程控制关断汽车电源,进行实时定位跟踪,查询历史移动轨迹等,可实现汽车防盗、被盗后追查的功能。基于AV890车载机,还可系统实现信息感知、信息传输与存储、远程控制等功能,实验结果表明,将AV890车载机作为车联网车载终端的解决方案是可行的、有效的,在基本不增加生产成本的前提下,可拓展产品的功能,提升产品的竞争力,具有较高的实际应用价值。
关键词:车联网;智能终端;AV890车载机;汽车防盗报警
中图分类号:TP393 文献标识码:A 文章编号:2095-1302(2015)07-00-02
0 引 言
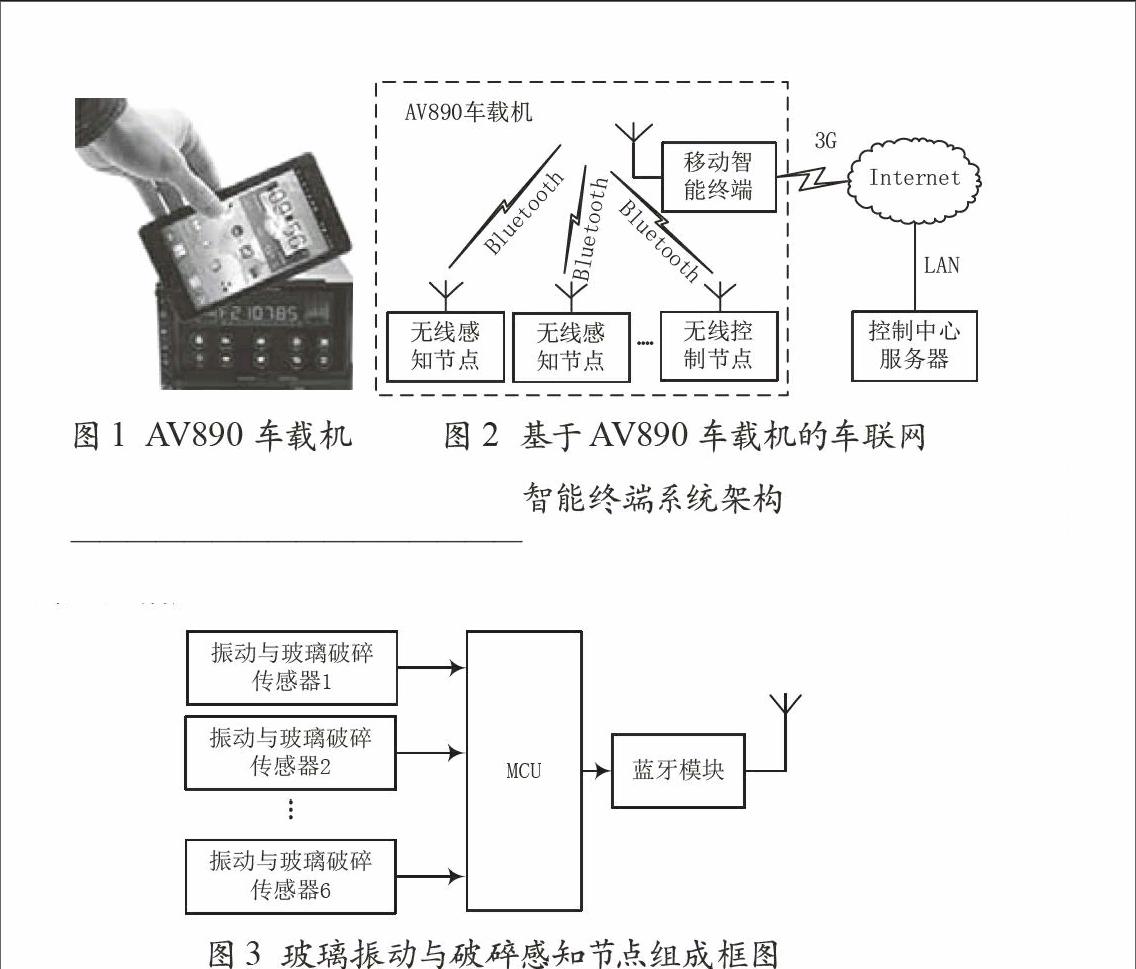
AV890车载机是江门市奥威斯电子有限公司研发的一款车载可拆卸式音响智能终端,如图1所示。它在传统车载音响的基础上,增加了可拆卸式移动智能终端,使之具备移动电话、音乐播放、网络服务、蓝牙连接、路径导航等现有智能手机的基本功能,并自带重力感应、距离传感器、光纤传感器等。移动智能终端采用Android操作系统,为开发者进行各种应用开发提供了开放的系统平台。本文提出了基于AV890车载机的车联网智能终端的总体设计方案,并以汽车防盗报警系统给出了应用实例。
1 系统架构
基于AV890车载机的车联网智能终端的系统架构如图2所示。AV890车载机作为车联网智能终端,主要实现三个方面的功能:一是车辆运行状态参数的智能感知,如身份、位置、车速、转速、路况、天气等信息的智能感知;二是实现车辆的反向控制,如远程关锁、断油断电、防碰制动等;三是承担车联网网关的功能,为终端数据的上传提供统一接口。其中感知节点和执行节点均采用蓝牙无线方式与移动智能终端进行通信,移动智能终端通过3G将数据上传至控制中心服务器。
图1 AV890车载机 图2 基于AV890车载机的车联网
智能终端系统架构
2 应用案例
本文以汽车防盗报警系统为例,说明AV890车联网智能终端的应用,系统具有以下功能:(1)定位跟踪与轨迹跟踪;(2)越界报警;(3)玻璃振动与破碎报警;(4)远程断电。
2.1 硬件设计
(1)感知节点硬件设计
位置信息可以由AV890车载机自带的GPS进行数据采集,只需编制相应的应用软件即可。玻璃振动与破碎感知节点的组成框图如图3所示,由6个振动传感器与玻璃破碎传感器、单片机和蓝牙模块组成,其中,蓝牙模块需要设置成从模块。6个玻璃振动与破碎传感器分别安装于前(后)挡风玻璃、左前(后)风玻璃和右前(后)风玻璃上,当检测到车窗受到外力击打或发生破碎时,通过蓝牙模块将检测信号发送到AV890车载机移动智能终端,然后,通过3G上传至控制中心服务器,通过编制相应的应用软件,通知车主,采取相应的处置措施。
图3 玻璃振动与破碎感知节点组成框图
(2)执行节点硬件设计
执行节点用于远程断电控制,其组成框图如图4所示,由蓝牙模块、单片机、驱动电路和控制器组成,其中,蓝牙模块需要设置成从模块。当车主收到车辆布防警报(越界报警、玻璃振动与破碎报警)信息时,可以通过手机发出远程断电指令,车载移动智能终端收到指令后,通过蓝牙方式将其发送给执行节点,使继电器动作,切断车辆电源。
图4 执行节点组成框图
2.2 软件设计
软件设计包括感知节点和执行节点下位机软件、位置信息感知和车载机智能终端软件、应用系统软件设计等,本文给出的应用系统功能框图如图5所示,各功能模块说明如下:
图5 应用系统功能框图
(1)实时定位:当用户进入实时定位模块时,AV890车载机自带的GPS按照约定的采集时间间隔(如10 s)进行位置信息感知,然后将感知信息通过车载机智能终端上传至指定服务器,并存入数据库中。用户智能手机从服务器获得汽车实时位置信息,并在电子地图上标记出来。位置信息每隔一个采集时间间隔更新1次,从而实现汽车的实时定位。
(2)轨迹跟踪:当用户进入轨迹跟踪模块时,首先输入跟踪时段,用户智能手机从服务器数据库中获取相应时段的位置信息,并据此在电子地图上画出移动轨迹。若输入时段中的终止时间为空,表示进行实时跟踪,即移动轨迹一直画到当前时刻,并随时间推移自动往后延长。
(3)越界报警:当用户进入越界报警模块时,首先打开布防开关,设置越界半径。车载智能终端收到布防指令后,监测汽车移动半径是否超出越界半径,超出时则向用户手机发出越界报警信息,用户手机发出振动和声音报警。用户可以通过远程断电开关,断开汽车电源。
(4)振动报警:当用户进入振动报警模块时,打开布防开关。车载智能终端收到布防指令后,监测车窗玻璃的振动和破碎情况,当出现振动或破碎时,向用户手机发出振动和破碎报警信息,用户手机发出振动和声音报警。用户可以通过远程断电开关,断开汽车电源。
3 系统调试结果
系统调试结果如图6所示,调试可实现汽车的实时定位、轨迹跟踪、越界报警、玻璃振动与破碎报警等功能,并可以通过远程断电开关,对汽车电源进行开关控制。
(a) 实时定位界面 (b) 轨迹跟踪界面
(c) 越界报警界面 (d) 玻璃振动与破碎报警界面
图6 应用系统调试结果
4 结 语
本文提出了基于AV890车载机的车联网智能终端解决方案,可实现信息感知、信息传输与存储、远程控制等功能,本文以汽车防盗报警系统为应用实例,成功地将AV890车载机作为车联网车载终端进行应用,实验结果表明,该解决方案是可行的、有效的。本文所设计的方案,在基本不增加生产成本的前提下,拓展了产品功能,提升了产品的竞争力,具有较高的实际应用价值。
参考文献
[1]华进.蜂窝网络环境下车联网网关研究[J].电信快报, 2012 (11): 36-39.
[2]程刚,郭达.车联网现状与发展研究[J].移动通信, 2011, 35(17):23-26.
[3]王群,钱焕延.车联网体系结构及感知层关键技术研究[J].电信科学, 2012, 28(12):1-9.
[4]詹益旺,胡斌杰.基于Android的车联网车载终端的设计[J]. 移动通信, 2013, 37(6):87-90.
[5]吴林,熊滔,蔡永香.基于Android手机的地图应用设计与开发[J].城市勘测,2011,4(2):16-19.
[6]樊振方,彭爱华,周健,等.基于GSM网络的汽车防盗报警系统设计[J]. 电子技术应用,2006,32(3):14-16.
[7]余亚东, 周佳, 叶森钢,等. 基于GPS/GSM的汽车防盗报警系统设计[J]. 电子技术, 2010, 37(2):75-76.
