舰载机着舰下滑道指示一致性分析
2020-10-12杜亚杰赵建军杨利斌
杜亚杰,赵建军,杨利斌
(海军航空大学, 山东 烟台 264001)
舰载机在着舰的最后阶段,主要靠中线相机为着舰指挥官提供的十字线图像信息以及光学助降装置为飞行员提供的光学下滑道指示信息进行着舰[1-3]。只有在两种设备精确一致地引导和着舰指挥官准确地指挥下,舰载机才能在航母上安全地完成着舰[4-6]。但是,由于航母长时间在海上遂行军事任务,以及设备老化、零位漂移等因素,系统技术状态和引导精度将会发生变化[7-8]。为了保证系统的可靠性和精确性,必须加强系统技术状态控制,适时地对系统中各引导设备进行标校[9-10]。
一般来说,逐个测量单一引导设备的引导精度,只要各自的精度在系统允许的误差范围内,就不需要对系统进行标校[11]。但是,也会出现引导不一致的情况。比如,中线相机指示舰载机飞行偏低,而飞行员看到的光学助降装置所给出的下滑道光束显示自己飞行偏高,出现引导不一致的现象,给飞行员造成巨大的心理压力,容易造成着舰安全事故。本文提出一种基于下滑道指示一致性的指标,可作为是否需要对系统进行标校的一个依据。
1 “肉球”偏移与飞机下滑偏移之间的运动学分析

图1 下滑偏差角与下滑偏移的几何关系
在进场着舰时,飞行员能看见“肉球”在灯室表面随飞机对理想下滑道的偏移而平滑地上下运动。当飞机在理想下滑道上时,飞行员看见“肉球”与灯室两边的水平基准光条在同一高度。当飞机高于理想下滑道时,飞行员看见“肉球”在水平基准光条的上方。当飞机低于理想下滑道时,飞行员看见“肉球”在水平基准光条的下方[13]。
根据图1所示的几何关系,可以推导出飞机相对于理想下滑道的偏移ha和“肉球”相对水平基准光条的偏移d之间的关系。
在图1中,O点表示虚像位置,虚像的位置低于水平基准光条所在的水平面。F点表示水平基准灯位置,它们之间的水平距离为L。A点表示飞行员眼睛,B点是光基准下滑线与经过飞行员眼睛的垂直水平的交点,C点为过A点的垂直平面和O点所在位置的水平面的交点,D点为过A点的垂直平面和甲板水平面的交点,OC=Rx,CD=Δh,d表示“肉球”偏移量,β0表示飞机理想的下滑角,β表示飞机的实际下滑角,两个角度之间的差即为下滑偏差角e。
下滑偏差角e和偏移量d之间的关系为:
(1)
由于
(2)
式(2)中下滑基准角β0较小,因此e+β0也是一个较小的角度,故可做近似处理得:

因此可得:
B3={{1,3,4},{1,3,5},{1,4,5},{2,3,4},{2,3,5},{2,4,5},{3,4,5},{1,2,3,4},{1,2,3,5},
(3)
可推导出偏移量ha和d的关系为:

(4)
经过仿真,下滑偏移量ha与“肉球”偏移量d以及舰载机距理想着舰点距离之间的关系如图2所示。

图2 下滑偏移量与“肉球”偏移量以及舰载机距理想着舰点距离关系图
由式(4)可以看出,当Rx较大时,即使是较小的“肉球”偏移量d,也会引起比较大的下滑偏移ha,飞行员应操纵驾驶杆调节飞行高度;但是,随着Rx不断减小,较小的下滑偏移ha可能出现较大的“肉球”偏移量d,飞行员也察觉到较大的视差角a,飞行员应谨慎操作,不要采取大幅度校正,应根据着舰指挥官的指示决定是否进行复飞[14]。
2 光学助降装置误差影响分析
舰载机如果按照基准下滑道下滑,则尾钩便可成功勾住阻拦索。但是假如光学助降装置存在一定偏差时,会造成“肉球”偏离基准位置,而“肉球”的偏移同时也表现在当飞机着舰时,实际着舰点与理想着舰点之间的偏差。
由图1可知,FF′即为着舰点偏差。根据图1中的几何关系得:
假设飞机按照某一给定基准下滑角下滑,则光学助降装置的误差对着舰点偏差的影响如图3所示。
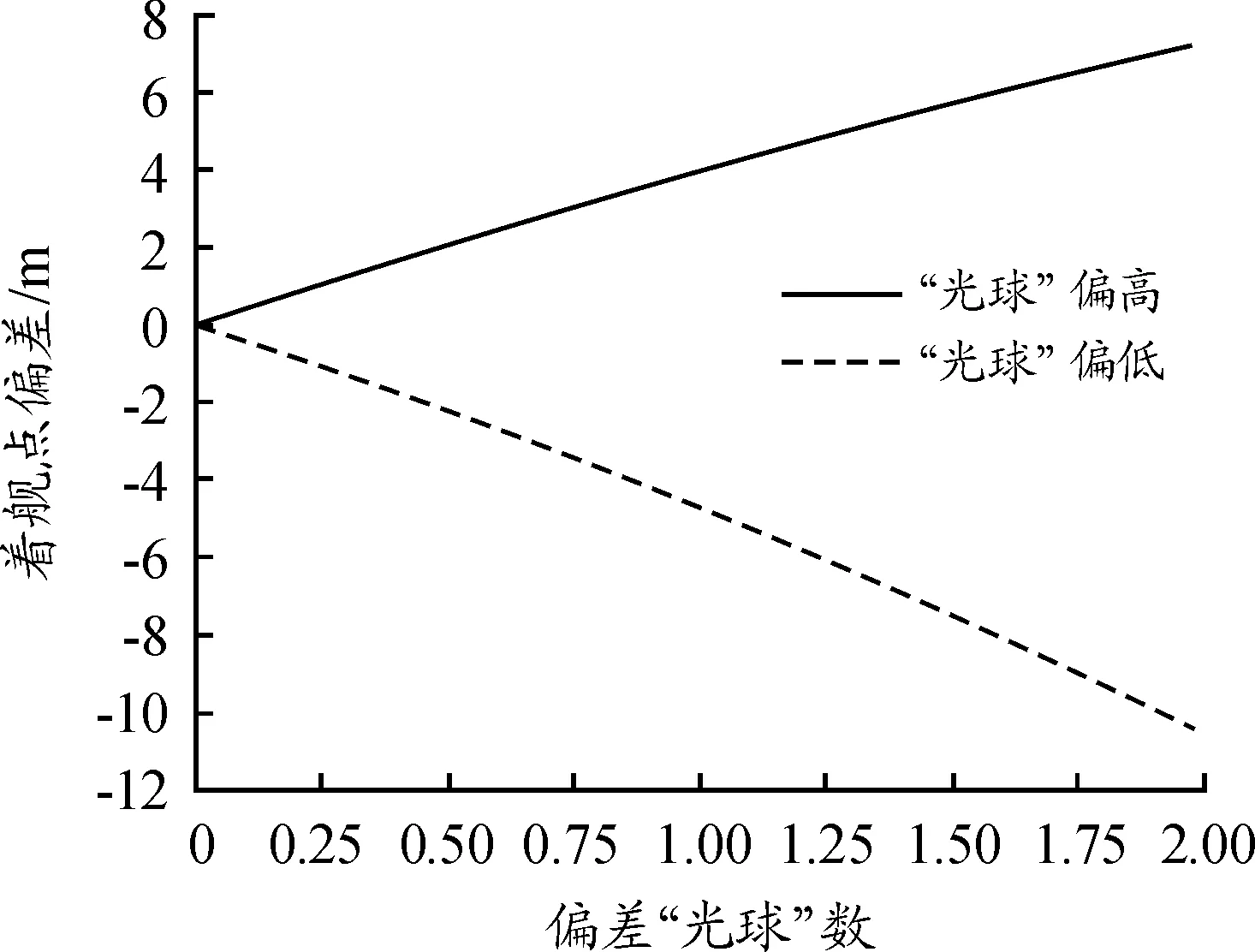
图3 光学助降装置误差对着舰点偏差的影响
通过以上仿真结果可以得出,随着下滑偏差角的增大,实际着舰点与理想着舰点之间的偏差越来越大。当“肉球”偏高时,实际着舰点在理想着舰点前方;偏低时,实际着舰点在理想着舰点后方。按照着舰引导系统对光学助降装置单个设备提出的精度指标要求,结合图3仿真结果,当着舰偏差不满足系统允许的误差时,需要对光学助降装置进行标校。
3 中线相机误差影响分析
中线相机位于斜甲板跑道中线上,其主要功能是向着舰指挥官提供直观的舰载机对准下滑道的视频信息,同时可以得到舰载机的角度信息。
在最后着舰阶段,中线相机起着至关重要的作用,它对舰载机是否对准跑道中线以及是否在理想着舰下滑道上直接产生影响,进而最终影响舰载机的安全着舰。中线相机的指示误差对舰载机下滑道产生的下滑偏移量如图4所示。

图4 中线相机指示误差示意图
图4中B为理想下滑道上的空间点,β0是理想下滑角,α是沿理想下滑道上的中线相机的测量角度;S是理想着舰点与中线相机之间的距离,R是空间点B与理想着舰点之间的水平距离;D是过B点的垂面与斜角甲板中线的交点。当中线电视存在测量偏差角δ时,中线电视测量的目标位置会有偏差,即A点是中线相机存在误差时,在当前距离上的指示点,AB即为相机的指示误差对舰载机下滑道产生的下滑偏移量。
下面给出中线相机偏差和由此产生的舰载机下滑偏移量之间的关系,有:
Rtanβ0=(R+S)tanα
AB=(R+S)tan(α+δ)-Rtanβ0
经过计算,中线相机的指示偏高时,在不同距离上产生的下滑偏移量如图5所示。

图5 距离、中线相机指示误差与下滑偏差量的关系图
由图5可以看出,当舰载机距离理想着舰点较远时,即使中线相机的指示偏差较小,也会引起比较大的下滑偏移量;随着舰载机不断接近理想着舰点,当中线相机指示偏差引起的下滑偏移量不满足系统允许的误差时,需要对中线相机进行标校。
4 下滑道指示一致性分析
舰载机着舰最后阶段主要依靠飞行员的目视能力,也就是飞行员依靠“肉球”控制飞机按照下滑道指示进行着舰。但是系统中的引导设备可能会因为自身的误差,导致指示不一致的现象。可能会出现飞行员看到“肉球”偏高,需要向下调整飞行,但是中线相机指示舰载机飞行偏低,着舰指挥官根据中线相机提供的引导信息要求飞行员抬高,出现引导不一致的现象,给飞行员造成巨大的心理压力,容易造成着舰安全事故。因此,可以将飞行员看到的“肉球”偏移作为光学助降装置和中线相机两型设备下滑道指示一致性的指标[15]。
利用本文第3节得到的中线相机的指示误差引起的舰载机下滑偏移量,结合第1节“肉球”偏移和下滑偏移的关系来推导出对应的“肉球”偏移量,并与光学助降装置指示误差引起的“肉球”偏移量作对比,对着舰下滑道指示一致性进行分析。图6为光学助降装置和中线相机下滑道指示一致性示意图。
图6中B为理想下滑道上的空间点,β0是理想下滑角,α是沿理想下滑道上的中线相机的测量角度;S是理想着舰点与后中线相机之间的距离,R是空间点B与理想着舰点之间的水平距离;D是过B点的垂面与斜角甲板中线的交点。当中线电视存在测量偏差角δ时,中线相机测量的目标位置会有偏差,即A点是中线相机存在误差时,在当前距离上的指示点,AB即为相机的指示误差对舰载机下滑道产生的下滑偏移量。O是光学助降装置中光学下滑道的虚像的位置,L是虚像到理想着舰点的距离,h为虚像下移高度。若飞行员根据中线相机提供的信息对飞机进行操作着舰,d为飞行员看到的肉球偏移量。

图6 下滑道指示一致性示意图
当沿着基准下滑道下滑时,存在如下关系:
Rtanβ0=(S+R)tanα
当中线相机存在测量误差时,根据图6中的几何关系得:
(R+L)tan(β0+e)=(S+R)tan(α+δ)+h
由此可以计算出当前飞行员在当前位置上的光学助降装置的指示偏差,从而得到当前飞行员可以看到的肉球偏移量。
图7给出了不同的中线相机指示误差,在不同距离上产生的肉球偏移量。

图7 中线相机指示误差与不同距离肉球偏移量的关系图
中线相机指示误差和光学助降装置的引导误差,可以用舰载机飞行员看到的“肉球”偏差来综合反映出来。当“肉球”的偏差量对飞行员产生足够大的心里负担时,即使这两型设备的误差均在系统允许的误差范围内,也建议对设备进行标校,以免引发安全事故。
5 结论
很大程度上,舰载机的安全着舰依赖于着舰引导系统中各引导设备精确地指示引导。当引导设备出现偏差时会对舰载机着舰造成影响。本文针对光学助降装置和中线相机产生引导偏差时,其分别对舰载机的着舰点和下滑偏移量产生的影响进行分析和仿真计算,在各自的误差允许范围内,不会影响舰载机安全着舰。本文提出指示一致性的指标,将上述两型引导设备存在误差时,飞行员看到的“肉球”偏移量作为分析对象。当飞行员看到的“肉球”偏移量比较大时,容易对飞行员造成巨大的心理压力,影响操作,引发安全事故。因此,可以将指示一致性作为系统标校的指标。
