胃-食管预制机器人胸内手工分层吻合
——一种胃-食管胸内吻合的新策略
2020-09-23卓泽国李刚林一丹
卓泽国 李刚 林一丹
与开胸手术相比,微创食管癌切除术(minimal invasive esophagectomy,MIE)手术损伤较小,具有相同甚至更好的手术效果,因此越来越多地应用于食管癌的外科治疗中[1-3]。受限于手术空间及器械灵活性,传统腔镜下胃-食管胸内手工分层吻合几乎无法完成,因此MIE胸内吻合多采用器械吻合。器械吻合属于全层吻合,无法实现黏膜与黏膜、肌层与浆肌层的自然对合。达芬奇手术机器人具有三维视野及可270°旋转的机械臂等优势,这使得机器人胸内手工分层吻合成为可能[4-5]。国内外已有一些医院利用机器人手术系统的优势,开展胃-食管胸内手工全层、分层吻合技术[6-7]。但综合来看,该技术仍然受到以下3方面的困扰:①吻合区出血影响术野,而使用电凝设备切割止血又将造成黏膜组织的热灼伤;②在胸腔内对于管状胃的剪裁受限于肋间隙的宽度与角度,可能造成切缘对合不良而成为术后吻合区瘘的高危因素;③拖曳管状胃进入胸腔的过程中可能造成管状胃的挫伤,影响吻合区愈合。为克服以上问题,笔者创新性地设计了胃-食管预制机器人胸内手工分层吻合(pretreatment-facilitated robot intrathoracic layered anastomosis,PRILA)[8]。主要预处理措施包括:以胸骨角为标志在体外完成管状胃的预处理,以获得高度血管化的管状胃;吻合前采用冷造口的方法在胃前壁完成胃部吻合口的预处理,减少吻合时吻合区出血的同时,也避免能量器械对吻合区的热灼伤;采取保护性胃包裹及传动法拖曳管状胃进入胸腔的方法,减少管状胃转运进入胸腔过程中的机械损伤;吻合前使用腔内阻断的方法夹闭食管近端,以减少吻合时食管端的出血。现报告该技术早期应用情况及已完成的12例患者的转归。
资料与方法
一、研究对象
研究对象为2018年9月至2019年7月,于华西医院胸外科就诊的食管腺癌或鳞状细胞癌患者。纳入标准:①术前评估为可切除中、下段食管癌患者;②患者理解并愿意接受机器人手术所带来的获益与风险。排除标准:①术前增强CT评估为cT4期患者;②术前检查提示存在远处转移患者。
二、手术方法
1. 手术入路:腹部手术阶段部分患者采用机器人或者腹腔镜完成,体位及镜孔分布与传统腹腔镜相似。胸部手术入路采用前期报道的90°侧卧-头侧平行入路[9]。胸部手术阶段患者90°侧卧,镜孔位于腋中线第8肋间,1号机械臂放置于镜孔右前方,2号、3号机械臂则位于镜孔左前方(图1)。以上4个孔位呈弧形排列,彼此之间相隔距离至少8 cm。助手孔则位于腋前线前方第4肋间,长度约为3.5 cm。机器人位于患者头侧,机械臂沿与患者身体纵轴平行方向展开。
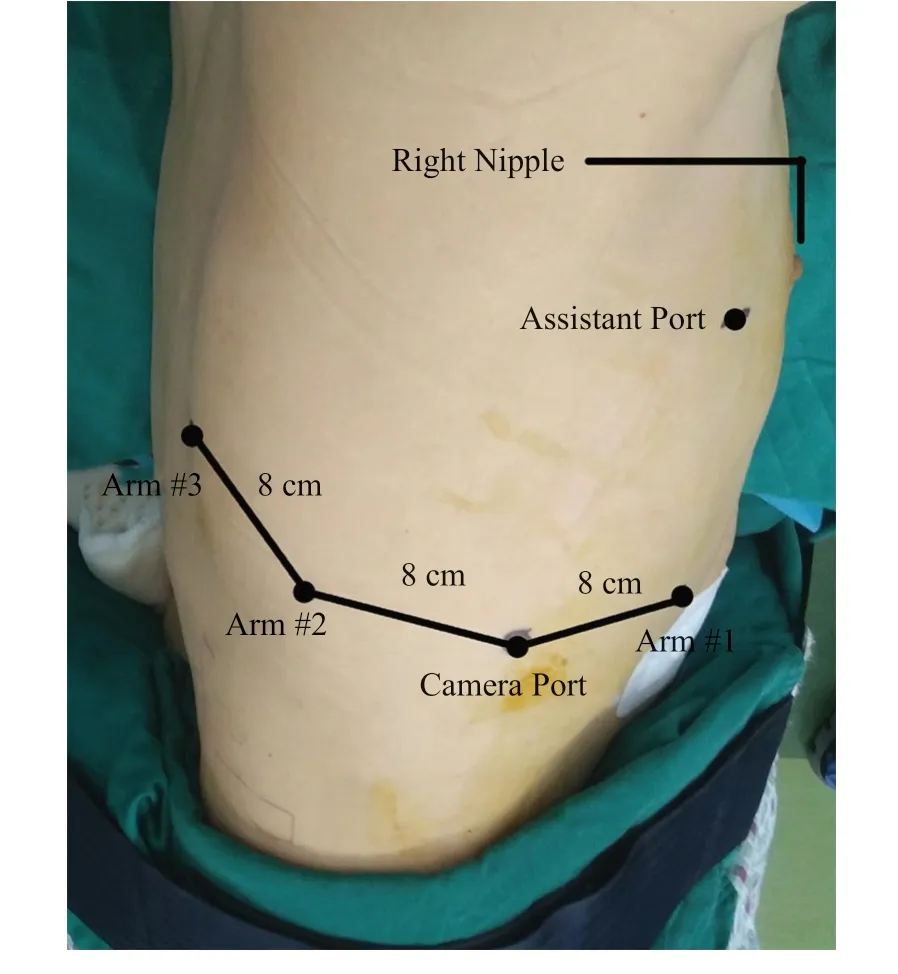
图1 胃-食管预制机器人胸内手工分层吻合胸部手术阶段镜孔分布图。镜孔位于腋中线第8肋间,1号机械臂放置于镜孔右前方,2号、3号机械臂则位于镜孔左前方。以上4个孔位呈弧形排列,彼此之间相隔距离至少8 cm。助手孔则位于腋前线前方第4肋间,长度约为3.5 cm
2. 管状胃预制:在腹部手术阶段完成胃的游离之后,通过腹部正中小切口(约5 cm)将胃提出腹腔外。使用直线切割缝合器制作一宽约4 cm(两横指)的管状胃,将管状胃沿患者身体的前正中线向胸部摆开,于胸骨角水平使用直线切割缝合器切除胸骨角以远胃底组织(图2),以获得高度血管化的管状胃。随后在管状胃前壁使用冷造口方法(即避免使用能量器械)造口(图3),以作为胃部吻合口,造口大小依据腹部手术阶段观察到的食管外径及术前食管吞钡造影测量得到的食管内径确定。造口前通过3-0缝线缝扎造口附近较大的黏膜下血管,造口完成后用5-0滑线连续缝合临时关闭胃造口。使用单层纱布保护性包裹管状胃(图4A),后续胸部手术阶段通过拖拽纱布(图4B,C),借助纱布与管状胃之间的摩擦力实现管状胃由膈肌裂孔向胸腔的转移,避免了对管状胃的直接抓持。
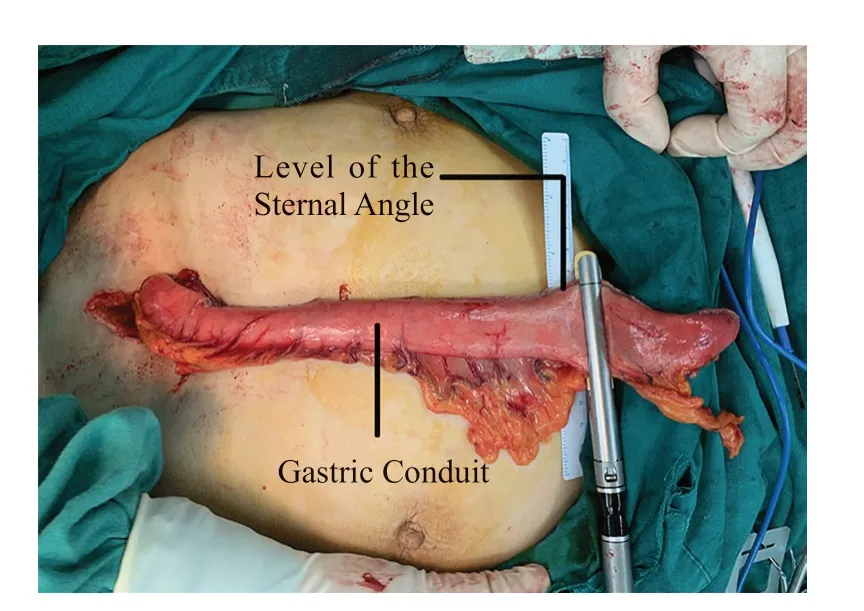
图2 切除胸骨角以远胃底组织,完成管状胃的剪裁。将管状胃沿患者身体的前正中线在胸部摆开,于胸骨角水平使用直线切割缝合器切除胸骨角以远胃底组织
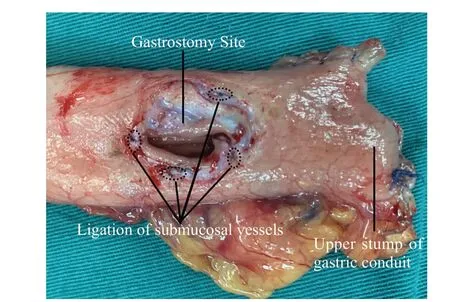
图3 缝扎胃部吻合区黏膜下血管,冷造口法完成胃部吻合区预制。在管状胃前壁选取胃部吻合口,尖刀片切开浆肌层暴露黏膜下层,缝扎通过吻合区的黏膜下血管以减少胃部吻合区出血(图中4个椭圆处为缝扎点),接着再继续向下切开黏膜下层及黏膜层,完成胃部吻合口的预制
3. 空肠造瘘:前8例患者在腹部手术阶段同时行空肠造瘘,放置空肠营养管,以便于术后营养支持。在第8例患者发生空肠造瘘处狭窄、近端肠梗阻,二次手术切除狭窄段空肠并行肠吻合后顺利康复。随后查阅相关文献[10-12]发现,近年来研究结果提示食管癌术中常规空肠造瘘放置空肠营养管将显著增加术后肠梗阻、空肠穿孔等空肠造瘘相关并发症。因此在此后的机器人手术中不再常规行术中空肠造瘘。

图4 纱布保护性包裹管状胃,拖曳纱布带动管状胃进入胸腔。A.单层纱布稍加压包裹管状胃,线结标记胃网膜右动脉以供拖曳过程中管状胃方位辨别,防止管状胃扭转。B.机械手抓持纱布,通过纱布与管状胃间的摩擦力带动管状胃进入胸腔,避免对管状胃的直接抓持。C.移去纱布,暴露胃部吻合口
4. 食管预制:切除肿瘤后,距离肿瘤上缘3~5 cm处切断食管,再距食管断端以远3~4 cm处放置一腔内阻断钳作为对食管近端的预处理,以减少吻合时食管近端的出血(图5)。
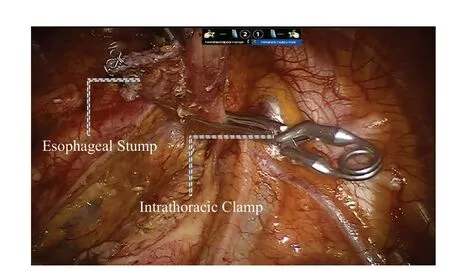
图5 食管近端放置一腔内阻断钳,完成食管端吻合前的预处理。距食管断端以近3~4 cm处放置一腔内阻断钳,以减少吻合时食管近端的出血
5. 胃-食管胸内手工分层吻合:详细技术流程参见以前的报道[8],主要步骤包括①使用3-0倒刺线缝合食管后壁肌层与管胃造口浆肌层;②使用4-0滑线连续缝合食管后壁黏膜层与管胃黏膜层,完成缝合后,将缝线临时固定于临近肺组织以保持缝合张力;③使用4-0滑线连续缝合前壁黏膜层;④前壁黏膜层缝合完毕后,松解临时固定于临近肺组织的缝线,将其与本步骤中的缝线打结,串联前后壁黏膜层;⑤使用3-0倒刺线连续缝合前壁肌层。
结 果
2018年9月至2019年7月共完成了12例PRILA胸内吻合术式,基本临床资料见表1。其中男10例,女2例;年龄(62.92±5.30)岁。其中6名患者肿瘤位于食管中段,5名位于食管下段,剩余1名患者肿瘤位于胃食管结合部。12名患者均按计划顺利完成了机器人手术,无中转开胸。手术时间为(447.50±62.06)min(包括空肠造瘘时间),其中胸内吻合耗时为(63.67±10.32)min。其中3例吻合口水平位于右胸顶,8例吻合口位于奇静脉弓水平,剩余1例则在下肺静脉水平完成吻合。术中出血量为(101.0±62.0)mL,术后病理提示患者均取得R0切除。
在术后并发症方面,12例患者均未发生吻合口瘘。1名患者发生术后肺部感染,经抗感染治疗后顺利康复。另有一名患者术后出现空肠营养管相关肠梗阻,并且发生了腹部切口感染。该例患者通过手术解除肠梗阻后,亦于术后第20天顺利出院。其余患者未出现严重术后并发症。12例患者的术后平均住院时间为9.9天,出院时所有患者可进半流质饮食。术后随访1年,所有患者未出现肿瘤复发或者转移。

表1 机器人PRILA患者基线资料与术后转归
讨 论
吻合口瘘是食管癌外科面临的独特挑战,而本组12例患者均无吻合口瘘的发生。吻合口瘘的发生率随着吻合位置的升高而明显增加,腹部、胸部及颈部吻合其吻合口瘘发生率分别约为1%,2%及15%[13-15]。吻合口瘘的发生将显著延长患者住院时间,并增加术后病死率[16]。改善食管替代物(管状胃)的血供是解决这一难题的根本性策略[17-18],目前改善管状胃血供有两种不同的策略。一是代偿性策略,即在行颈部吻合时通过改变管状胃的形状、粗细,增加胃底微血管的代偿性供血、回流功能。但是该策略有失代偿风险,尤其在胃网膜右血管弓较短或胃长度较短的患者中风险明显增加。另一策略为解剖性策略,即降低吻合口的位置行胸内吻合,由于吻合高度的下降,缺乏血供的胃底部分术中不必保留,以此确保吻合口血流充沛。
对于上段食管癌患者来说,为保证阴性手术切缘往往只能采取颈部吻合,解剖性策略不适用于该部分患者。但是对于中下段食管癌患者来说,行颈部还是胸内吻合目前国内外指南并未规定相对应的指针,两者均是合理可行的。由于手工分层吻合基本还原了消化道自然的对合模式,在华西医院,颈部吻合多采用这种方式进行,相较于手工全层及器械全层吻合,相信手工分层吻合将更有利于吻合口的愈合。但是在传统腔镜手术系统下,受制于手术空间及器械的灵活性,完成胸内手工分层吻合难度极大。而机器人手术系统在狭小空间内完成精细操作的优势,恰好满足了胸内手工分层吻合的技术要求[19]。本文所报道的PRILA吻合技术正是对中下段食管癌患者行机器人胸内手工分层吻合的一种尝试。笔者以胸骨角为体表标志切除管状胃远端,既可以保证弓上吻合的长度,又可以切除缺乏血供的胃底组织,使管状胃的血管化程度(胃网膜右动脉弓长度除以管状胃长度)在这12例患者中均达到了100%,保证了胃部吻合口位于血流及回流都十分充沛的区域。并且即便是在胸顶水平PRILA机器人胸内手工分层吻合技术亦能顺利完成胃-食管吻合,对于中段及下段食管癌的手术治疗具有较好的普适性。
由于在行颈部吻合时,管状胃必须穿越胸腔才能到达颈部。对于胸廓入口较为狭窄的患者,管状胃在此处将受到周围骨性结构的压迫,可能导致吻合区血流受阻,影响吻合区血供。Sato等[13]的研究结果表明狭窄的胸廓入口为颈部吻合口瘘发生的危险因素。前期研究[20]证实如果再将吻合口固定于颈部将显著增加吻合口瘘的发生率。因此颈部吻合口愈合还受制于胸廓入口的大小,而胸内吻合则完全避免了管状胃在胸廓入口处可能会发生的嵌顿现象。所以对于胸廓入口显著狭窄的中下段食管癌患者,从降低吻合口瘘发生风险上考虑,行胸内吻合更加合理。并且由于没有颈部切口,颈部不留疤痕,不仅达到了更加微创的效果,还有利于患者术后从心理上回归社会生活。有报道[21]显示,行胸内吻合的患者其术后生存质量要优于颈部吻合。
已报道的机器人胸内吻合中,管状胃的剪裁均是在胸腔内完成,受制于肋间隙的宽度与角度,在胸腔内使用切割缝合器完成管状胃的剪裁难度大,若切割缝合器应用不当将造成局部组织张力升高及钉合不良,导致术后吻合口瘘发生率增高[6]。而在笔者报道的方法中,在管状胃预制阶段,将胃拖出腹腔,在腹腔外完成了管状胃的制作之后,利用胸骨角来预计吻合口位置,从而确定了所需保留的管胃长度。胸骨角与主动脉弓上缘基本处于同一水平,胸骨角以远的乏血供胃组织在此步骤中被切除,既保证了管状胃的长度,又保证了用于替代食管的管状胃的高度血管化。接着通过对胃吻合区黏膜下血管的预处理缝扎,有效减少了胃部造口的出血,避免了使用高功率电凝切割对管状胃造口区造成的热灼伤。腹部手术阶段管胃的体外预制亦减少了胸腔内的操作和出血,保证了吻合区术野的清晰。再者巧妙地应用纱布与管状胃间的摩檫力将管胃部拖入胸腔,同时由于纱布的包裹亦保护了管状胃,减少了在拖拽过程中对管状胃的损伤。食管预制阶段,使用腔内阻断钳阻断食管断端,在修剪断端时明显减少了断端的出血,亦保证了术野的清晰。
本组12例患者平均手术时间为448 min,手术时间较长的主要原因一是前8例患者术中进行了空肠造瘘并放置营养管,二是PRILA作为一项新的手术技术,需要术者在手术中不断探索和改进。随着PRILA技术的日趋完善,手术速度明显提升,最快1例手术仅耗时354 min。
综上,本文报道的PRILA技术稳定可靠,学习曲线较短,有望成为一项实用的中下段食管癌机器人外科治疗的新策略。
