相控阵探测器对地目标快速聚焦定位策略研究*
2020-09-23谢于晨
谢于晨,王 芳
(江西科技学院信息工程学院,南昌 330098)
0 引言
为解决机载平台雷达探测器的远程定位问题,不少专家学者进行了深入细致的研究,主要的研究方向集中在探测波形设计、目标定位方法两方面。严金海[1]提出了一种用于探测识别机场跑道的三波束毫米波机载敏感器,该敏感器由两波束圆锥扫描辐射计与共用同一波束的辐射计、雷达复合体组成。文中给出了该敏感器的作用距离,搜索识别方案。在仿真实验以及实际试验的结果中,反映出该敏感器能够有效识别机场跑道,相较于成像识别技术更易实现。宋林丽[2]针对毫米波引信对地探测多普勒信号的需求,对多普勒引信进行了实测试验,分别获取了18 km 和10 km 末弹道的多普勒信号,绘出了距地不同高度多普勒信号的变化曲线,通过频谱分析,得到了18 km 和10 km 末弹道多普勒频率分别为70 kHz 和89 kHz,为引信信号处理电路设计提供了依据。张阳[3]针对传统机载SAR 系统无法实现运动目标检测及信息提取的问题,基于高超声速滑翔式飞行器平台,提出一种适应SAR/MTI 处理的多模雷达末制导工作流程。飞行器飞行过程中,首段为广域扫描SAR 模式,可实现运动目标的多次重复访问,实现大探测范围内目标的快速检测定位;中段为大前斜视SAR/MTI 模式,对感兴趣区域成像的同时完成运动目标的再次检测和高精度成像识别;末段为单脉冲跟踪,引导平台实现对目标精确打击。通过仿真实验验证了该流程的有效性。上述研究成果反映了一段时间内针对机载平台目标定位为题的研究成果,为后续的精确定位、快速定位提供了研究思路。
另一些研究则是针对机载探测器的抗干扰能力、响应实时性等。PAIK[5]针对机载单脉冲探测器的抗干扰能力进行了实测试验,在半实物仿真过程中,在探测器中注入高斯白噪声和相位噪声作为外部干扰,通过定义高斯白噪声的描述字,在相位干扰的情况下,结果表明当目标回波信号的频偏较大时,仅需要较小的相位噪声就足以造成较大的干扰效果,文章从如何干扰机载探测器的角度出发,相关实验数据能够用于机载探测器目标检测实验。LIU[6]提出了一种扩展的非线性CS(Chirp Scaling)算法,用于处理高斜视、高分辨率的机载合成孔径雷达成像问题。通过推导,LIU 简化了传统的四阶多项式距离方程,提出了等效双曲线距离模型(equivalent hyperbolic range model,EHRM),同时推导了二维点目标参考谱,NLCS 算法相比于传统的机载SAR 成像算法,由于简化了原理计算,整体相应速度更快,更加贴近机载平台要求。
2018 年4 月,梁笑轩[4]在其发表的论文中,提出了一种基于二维相控阵天线的RFID 定位方法(Phased Array based Range Free Tag Localization,PATL),解决识别、定位空间内的RFID 标签。该方法利用相控阵天线辐射波束角度可调的特点,对搜索平面内的目标区域依次进行扫描,并通过统计不同天线区域内同一标签出现的次数,利用加权算法给出标签的二维位置坐标。在其实测试验中,利用ImpinjxArray 阅读器对区域内8 个不同的标签进行探测,将相控阵投影至探测平面的区域分成8 个象限、52 个区域,试验过程中,遍历波束扫描区域,并记录下标签在每一区域被截获的次数,利用次数解算权值,从而进一步运用加权算法实现RFID 标签定位。该探测器相控阵平面与探测平面夹角为0°,距离2 m,最终经过多轮测试,得到RFID 标签的定位精度不超过21 cm。相比于该领域其他的定位算法,其探测景区都有很大的提升。
该算法能够高精度定位探测平面目标,与本文所关注的机载相控阵探测器的工作方式类似。因此,由PATL 算法出发,提出一种适用于机载平台的基于波束控制的快速聚焦定位策略(Fast Focusing and Positioning Based on Beam Control,FFP-BC),该策略利用相控阵天线辐射波束角度可调的特点,对目标区域依次进行扫描;并通过改变相控阵发射波束参数,缩小目标探测区域;同时利用加权算法、探测模型共同解算得到目标的二维坐标。
1 机载相控阵天线探测模型
探测波束以阵面法向目标区域发射,此时,探测器天线与地面呈一定角度,并按照飞行轨迹向既定区域运动。对目标检测获取目标精确坐标后,向目标实施探测任务。机载相控阵平面对目标定位工作模式如图1 所示。
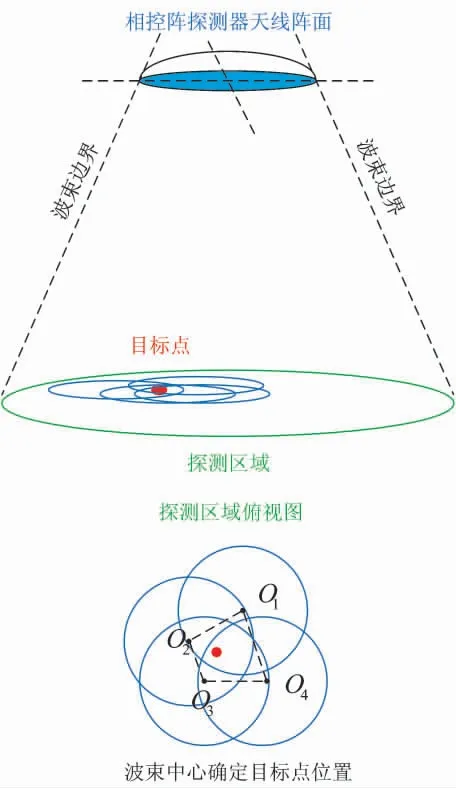
图1 机载相控阵探测器对地目标定位工作模式

图2 η ξ 控制子波束中心位置
以探测波束垂直探测为例,机载探测器通过四象限波束对地面目标进行定位,四象限波束能够将目标的俯仰、方位进行二维定位,从而获取目标的二维坐标。推广到相控阵天线,相控阵天线是由多个天线阵元所组成的天线阵列,它利用电子调制的方式,在不同阵元之间形成一定规律的相位差,使天线阵列形成特定的辐射方向,并通过不断调整相位差使得天线能够对空间平面进行扫描。以线阵为例对相控阵天线探测进行说明,设线阵共有Q 个阵元,且回波信号入射方向为ζ,则目标回波信号可以表示为:

式中,A(ζ)表示接收信道响应矩阵,为线阵的每一阵元截获信号的集合,是阵元间距、载波波长的函数。当线阵天线截获目标回波信号时,相位值由目标相对于不同阵元的入射角决定。探测器上相邻阵元的距离远小于天线与目标之间的距离,因此,通常情况下将目标回波到不同阵元的入射角视为定值,记为ζT,则相邻阵元的相位差可以表示为:

一般情况下,相控阵面通过一系列的移相器实现相控阵面对于波束方向图F(ζ)的控制,它反映了天线在空间不同角度上的辐射强度,当目标的回波信号入射方向越接近探测波束入射角,则在信道中反映出更高的辐射能量,这也是本文所提的目标定位策略的基础。探测器天线方向图函数可看作是多个均匀线性阵列方向图(自定义单元方向图)的乘积。以图2 中子波束模型为例,则它们所组成的圆形相控阵方向图函数可表示为:

2 FFP-BC 策略原理
建立以探测器中心法线与相控阵天线阵面相交点为原点,水平方向为横轴的机载相控阵天线平面的二维坐标系,如图3 所示。
按照图3 建立探测器坐标系,坐标原点为探测器中心法线与天线阵面交点,横轴为xphased,纵轴为yphased。设每一阵元的坐标表示为(xc,yc),则每一阵元的坐标即可在探测器坐标系中表示出来。当探测器工作时,每一阵元法向发射探测波束,波束与地面相交,截交线为椭圆,设探测器中心法线与地面夹角为β,则建立阵元在地面的位置关系,记为截交面坐标系,如图4 所示:
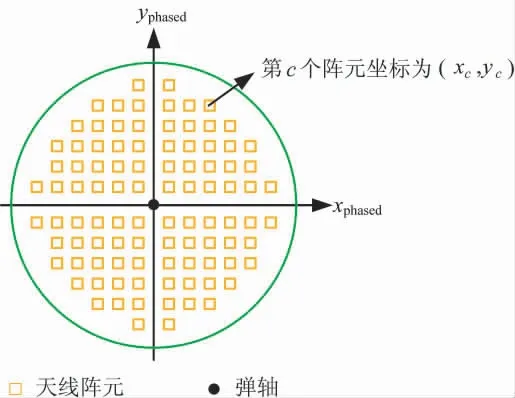
图3 相控阵阵面天线阵元排布与探测器坐标系
如图4 所示,探测器波束在截交面上的投影为一椭圆,探测器相控阵天线上第c 个阵元投影到结交面上的坐标为(xcg,ycg)。结合图3 与图4,探测器坐标系与截交面坐标系之间的转换关系可以记成:
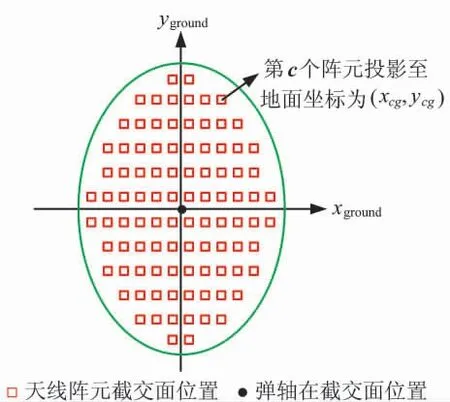
图4 探测波束与地面截交面示意图

当目标回波被相控阵探测器截获后,会有某些通道存在目标回波信号,而另一些通道不会检测到目标。因此,令能够检测到目标回波信号的相邻阵元为有效天线阵元,记为集合Mregion:


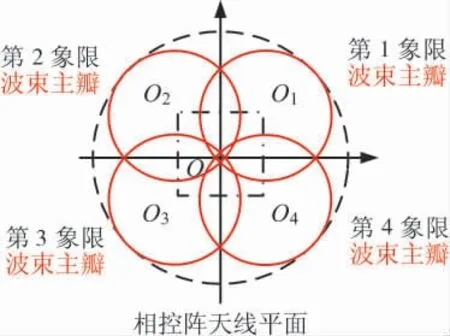
图5 4 个子波束截面示意
在探测过程中,地面目标被波束覆盖从而反射形成目标回波,被相控阵天线截获后进行测角,最终获取目标位置信息。即1、2 象限或3、4 象限获得目标点水平向坐标;1、4 象限或2、3 象限获得目标点垂直坐标。针对面积较大的目标而言,通过角度的测量来进行定位,会造成一定程度上的误差。
本文不再利用和、差波束解算得到角度的方法对波束范围内的目标进行定位,而是利用对于不同象限(不仅只针对传统的四象限的相控阵天线)的波束中心位置的合理控制来实现波束的快速聚焦,最终定位目标坐标,即使目标拥有较大的面积,也会得到目标的轮廓信息。
设相控阵阵面包含N 个阵元,且信号方向图可由i 个象限的子波束叠加而成,第i 个子波束记为Si,波束中心记为Oi。当相控阵探测器工作时,若截获得到目标信息,说明波束内包含有待测目标,如图6 所示。
图6 中,待测目标附近有Om、On、Op以及Oq为中心的4 个波束(为简化推导,用波束中心符号表示整个波束),但是仅有Om、On、Op3 个波束覆盖了待测目标,因此,目标必定处于以Om、On、Op组成的封闭图形中,记为判定区域R0。则可利用3 个波束中心坐标对待测目标(xtyt)进行粗糙定位:

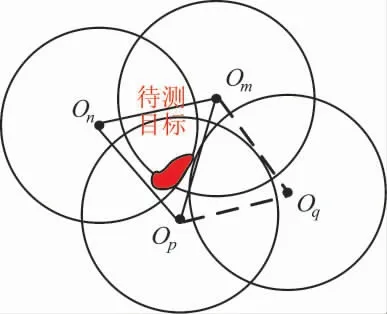
图6 FFP-BC 策略探测示意

式中,α 表示权值集合。本文提出的快速聚焦定位方法是利用波束测量同一区域,通过求取目标的较大回波功率的天线波束集,赋予波束中心坐标相应修正权值,从而调整子波束中心位置,实现对目标的精确定位。根据天线辐射原理,波束方向角指向位置(也就是中心点附近)应拥有最大辐射强度,越偏离波束方向则辐射能力越弱,则可将权值集合中的各个元素表示为:

式中,pc表示待测目标在某波束方向的目标被截获功率,则式(2)可以变为:

式中,波束中心坐标按照相应的权值进行修正后,最终得到的待测目标范围进一步缩小,解算获得的精度将会大幅提升。经过一次加权后,更新的目标范围记为Mregion1,需要对更新的目标范围进行检验,才能获取待测目标坐标是否达到预设精度。
上述策略步骤中,并没有复杂的计算公式,也不涉及积分、微分,所以在实时性上能够达到机载平台的要求。FFP-BC 策略流程如表1 所示。
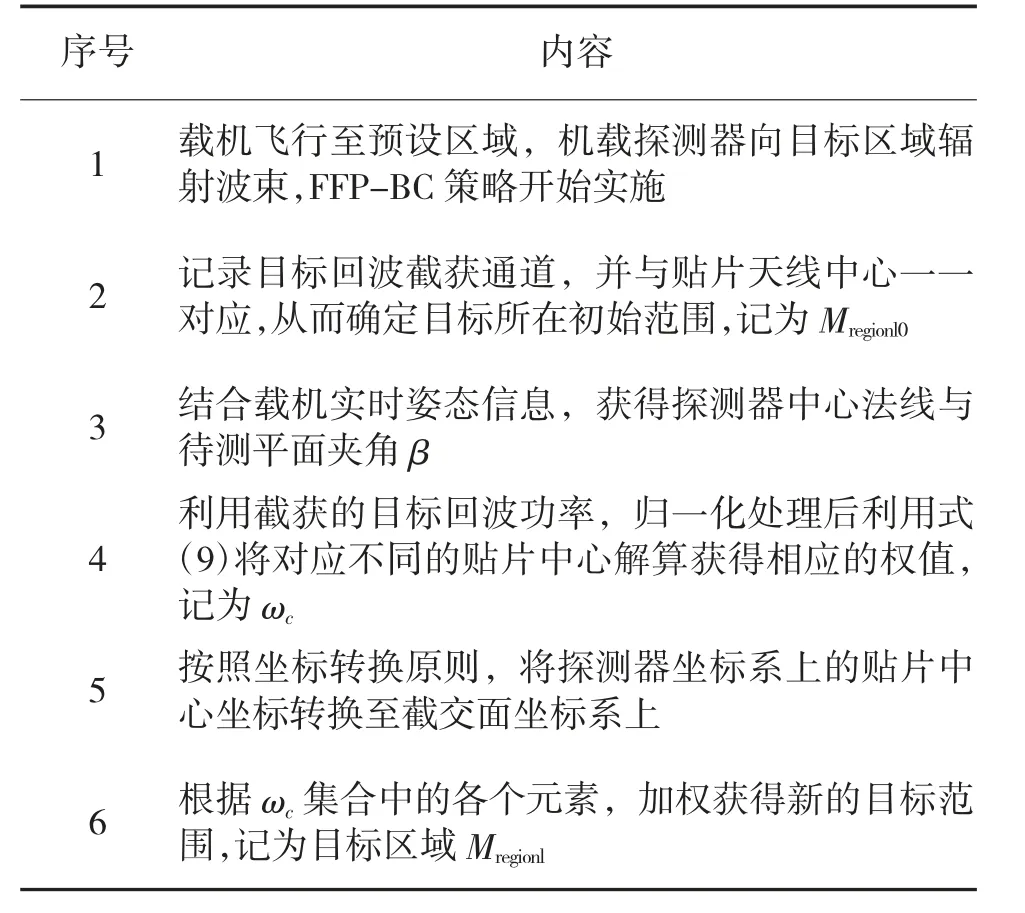
表1 FFP-BC 策略实施步骤
3 实测试验
利用16 信道芯片在实验室进行静态试验,以验证本文所提聚焦定位策略的可行性与优越性。在测试轨道上有一个信号发生器,利用轨道模拟目标方位向,利用信号强弱模拟距离向,利用测试轨道高低模拟俯仰向。测试过程中,设置3 个不同位置的目标,利用16 信道芯片进行测量,回波被截获后,经过匹配滤波后得到输出信号。
在待测平面设置3 个静态目标,建立相控阵天线方向图与分布模型,相关试验参数如表2 所示,测试模型如图7 所示。
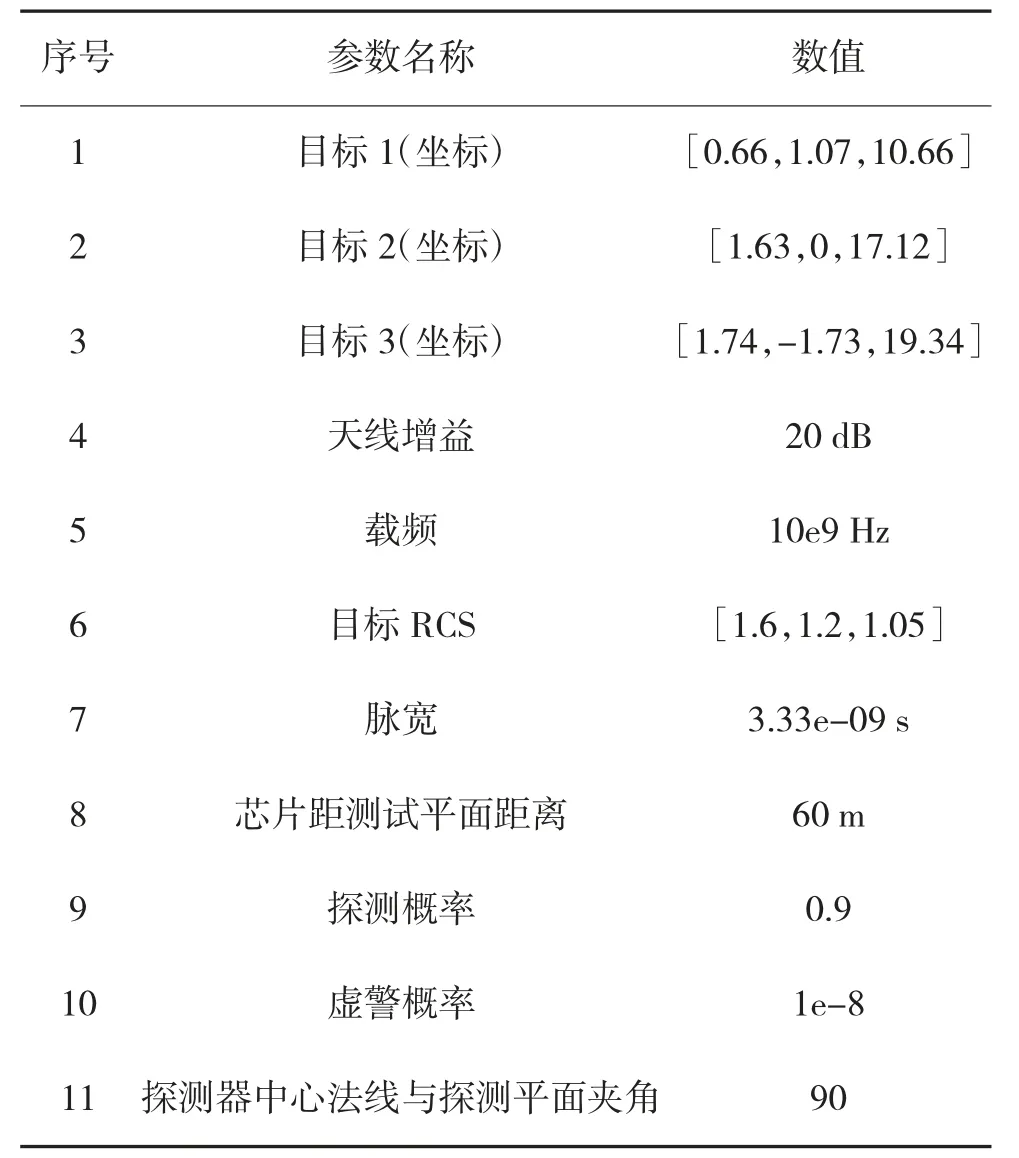
表2 试验参数
如图7 所示,设相控阵天线阵面中心与目标设置中心为Z 轴,并将阵元编号。根据目标坐标设置,1 号~8 号阵元对于3 个目标不敏感,信道结果如图8 所示:
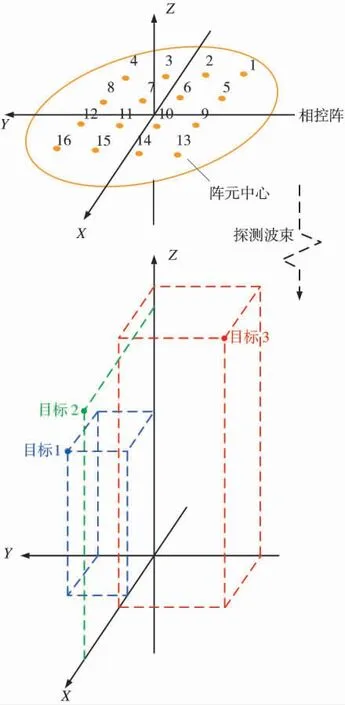
图7 试验模型
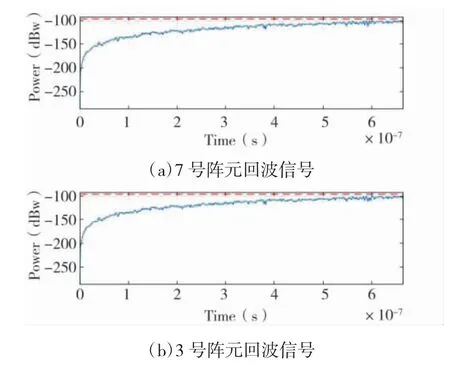
图8 3 号、7 号阵元回波信号结果
如图8 所示,由于试验参数设置,阵元的探测波束较窄,1 号~8 号阵元处于X 轴负半轴,对于3个目标的回波信号均未出现目标信息,剩余的X 轴正半轴处的阵元信道如图10 所示。因此,考虑9 号~16 号阵元回波信号,仅考虑处于X 轴负半轴的8个天线阵元,阵元坐标如表3 所示,部分信道回波数据结果如图9 所示:
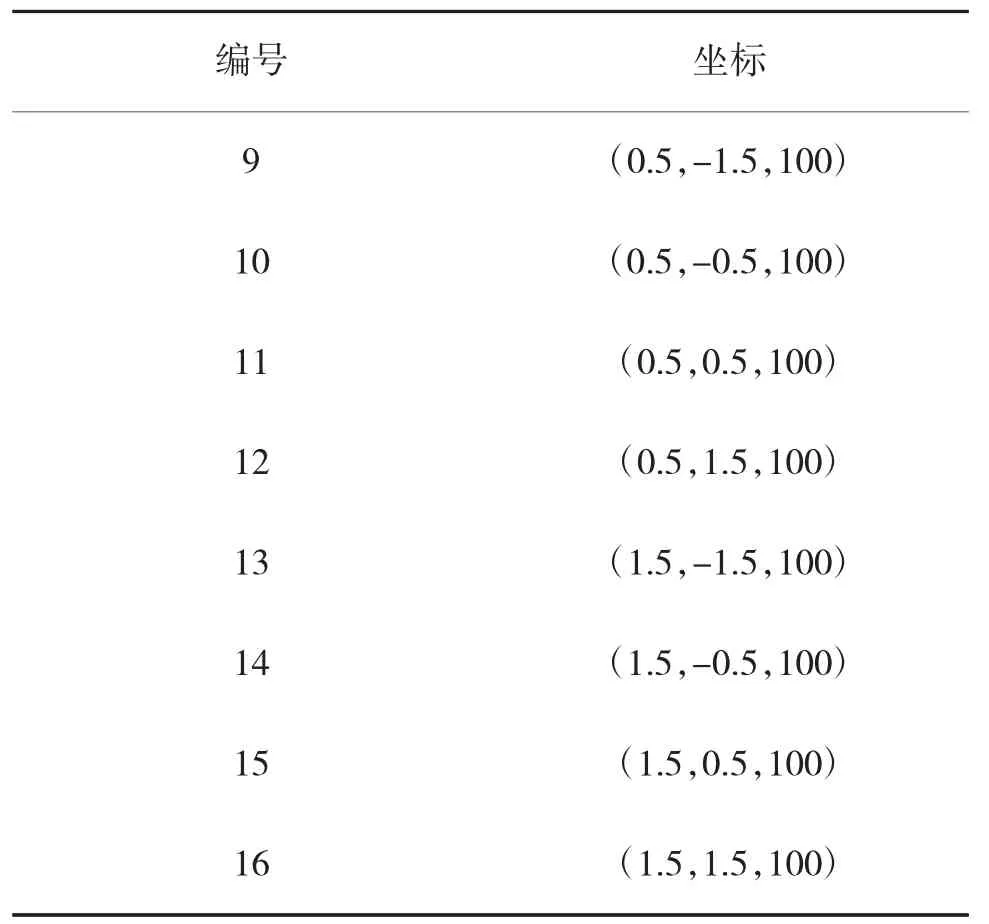
表3 9 至16 阵元坐标
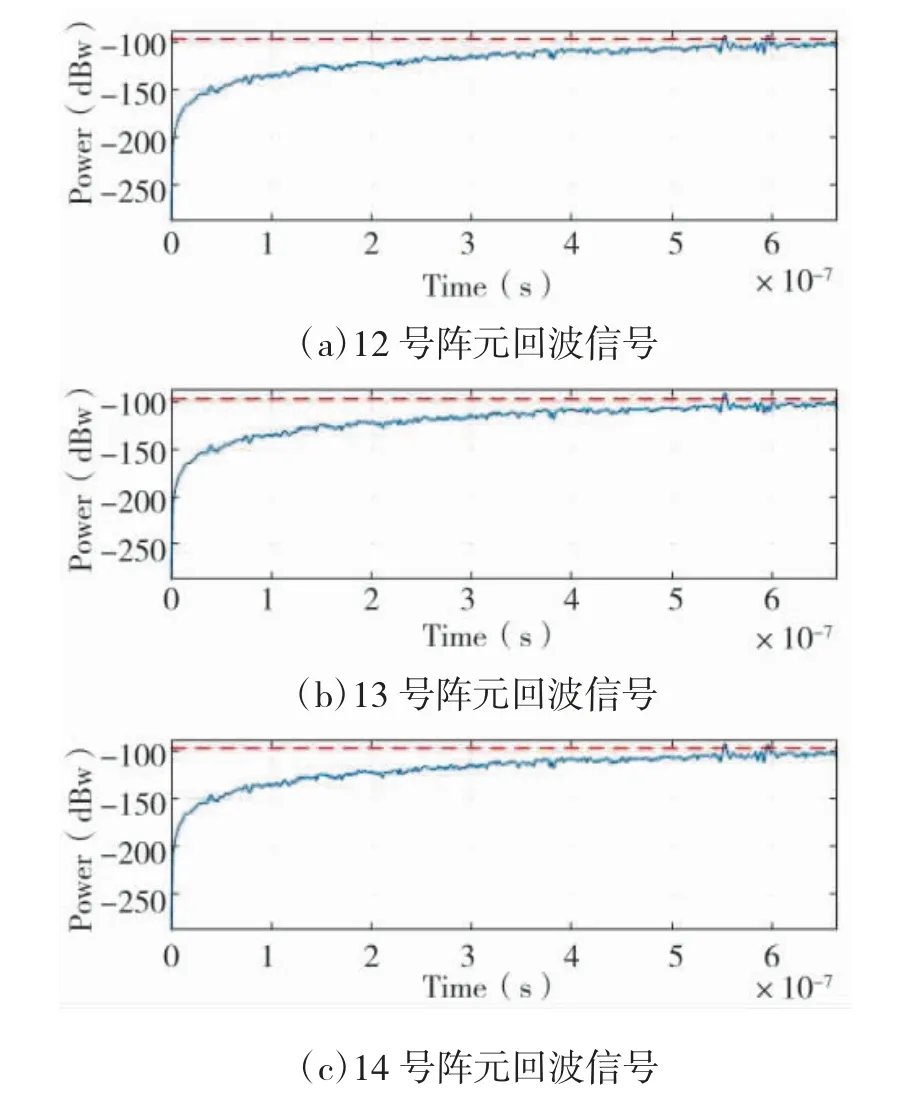
图9 12 号、13 号、14 号阵元回波信号结果
经过聚焦算法,加权赋值后,目标坐标的聚焦结果如图10 所示:
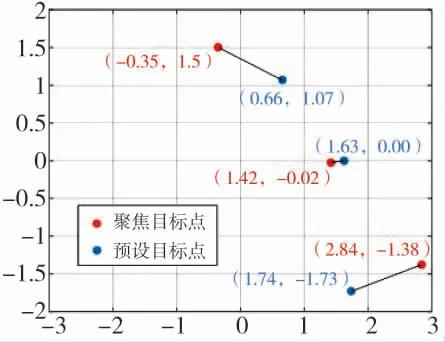
图10 目标二维聚焦定位结果
如图10 所示,蓝色代表试验初始设定的目标在待测平面二维坐标;红色代表经过加权算法后聚焦得到的目标坐标结果。从图中结果可以看出,对于3 个XOY 平面定位结果而言,定位误差分别为:1.10 m、0.20 m、1.15 m。由于目标2 位于坐标轴上,14 号与15 号贴片天线波束相交轴线上,两贴片的输出信号相同,因此,定位误差较小。
4 结论
本文提出机载相控阵天线的对地目标快速聚焦定位方法。该方法利用相控阵天线辐射波束方向角可调的特点,通过统计不同天线区域内目标回波功率,利用归一化加权算法求解目标所处的探测平面的二维坐标。该方法能够适用于多个目标的定位,实验结果表明,该方法的定位精度为2 m 以下。接下来工作的重点在于面向大规模目标时提升信号处理算法精度;另外,目标的移动轨迹跟踪也是未来研究的重要内容。