三维激光扫描技术在桥梁检测中的应用
2020-09-23韩波陈志文
文/韩波、陈志文
1 前言
在公路运输领域中,桥梁工程是非常重要的结构组成,所以桥梁建设施工的环节中做好质量控制非常重要。就当前现状而言,桥梁建设领域已经逐步迈入“建养并重”的非常时期,大多数的桥梁项目需要进行大中修。三维激光扫描技术的出现,能够攻克地理环境问题。三维激光扫描是利用专业设备进行各个结构部分的检测,从而得到空间坐标与表面数据信息,形成三维模型。与传统检测技术对比分析,三维激光扫描技术的精度更高,功能性也更好,所以桥梁检测中很多都会应用该技术。
2 三维激光扫描技术原理分析
三维激光扫描技术属于技术新颖的非接触式测量技术,该技术全面应用于桥梁工程的质量检测中,对测量行业起到了积极的促进作用。该技术通过点云形式采集、存储数据信息,转变传统单点测量的工作方式,并利用高密度数据网点确定被测量结构的坐标、表面信息数据等,提升数据精度。与传统测量技术对比分析,三维激光扫描技术不仅可以提高测量工作效率,其数据精度也非常高。按照不同的测距原理做好分析,可以将该技术分为干涉相位法、脉冲法、三角测距法等,下面将逐一分析常见的测量技术[1]。
2.1 干涉法测距原理
该技术是通过发射出连续性的激光光源,在光学的干扰系统影响下,明确相位差参数、仪器与待测量物体的间隔距离。通常,在距离测量中,干涉相位法应用范围比较大,数据精度也非常高,其精度一般可以达到毫米级。
2.2 脉冲测距法原理
如果要实施远距离的测距工作,那么脉冲测距法的应用是比较广泛的,其最远可以达到几千米。但是对比来说,它的测量精度相对比较差。这种方法应用的主要设备是发射接收器、信号处理器、计时装置等。信号器在控制过程中,扫描仪可以直接发射出脉冲激光,在目测的表面进行激光的反射,而接收器可以直接接收到相应的信号,然后存储到系统内,并利用回波器掌握必要的信息,再通过计时器明确具体的脉冲运行时间,然后根据时间与速度确定最终距离参数,形成数据模型。
2.3 激光三角法原理
与上述两种测量方法对比分析,激光三角法主要是应用于测量数据精度较高的测量工作中。其原理是应用发射器进行信号发射,并和待测量的物体与接收器装置形成三角形,而这两个装置的间隔距离是已经确定的,所以需要确定入射角和反射角,然后确定最终的测量距离,达到测量数据精度的要求。
3 工程概况
某桥梁项目的设计方案确定采用三块连续预应力箱梁的形式,跨径尺寸30.13m+30.05m+29.98m,桥面结构部分的宽度为9m,且投入使用在10年以上。但因为设计时间比较长,所以资料完善度较差。经过多个方面的分析,本次工程管理人员决定选择使用三维激光扫描仪装置进行桥梁的运行情况分析和研究。在初步检测之后可以确定,该桥梁项目属于变截面的形式,在跨中截面的10m 范围内,对其截面点2.5m的位置上进行测试[2]。
4 三维激光扫描技术应用过程分析
4.1 三维扫描试验
在跨中梁底进行位移数据测量环节,三维激光扫描技术检测后的数据为0.64mm,因为本次工程中属于变截面的形式,所以各个结构部分的尺寸有一定的不同,因此这个部分并不作为测量重点。该桥梁应用的是跨中截面形式,可以利用CAD 进行技术参数的核算和分析,获取箱梁面的惯性参数。通过分析可知混凝土构件强度确定为3.3186×1010N/m2。因此,本次工程的弹性模量和C45 混凝土强度相同,在进行该桥梁的建模分析过程中可以将该数据作为材料属性技术参数。由于本次桥梁投入使用年限较长,很多设计资料遗失或者不完全,因此为了使得加载试验更加精准,我们需要利用有限元模型分析确定桥梁的加载具体情况,了解到变形参数值,然后分级进行加载处理。如果变形参数和计算数据的偏差比较大或者在预计值之上,则应该停止加载作业,否则将会导致结构损坏比较严重,威胁项目运行的安全性[3]。
4.2 加载位置及工况分析
在加载位置与工况分析阶段,主要采用建模方式对其进行分析;设计属性为城-A 级,并采用36t 加载汽车进行试验。主要测试内容包含结构支点、桥梁跨中与桥梁结构1/4 位置处。为了使检测顺利进行,三维激光扫描测量第一、二跨与1/4 位置;为了准确获取桥梁应用状态数据信息,从方便、快速方面出发,本次加载的工况主要分为两个。工况一:测试第一跨正弯曲最大位移位置(图1);工况二:偏载条件下进行第二跨正弯矩最大范围内开始位移参数的检测(图2)。
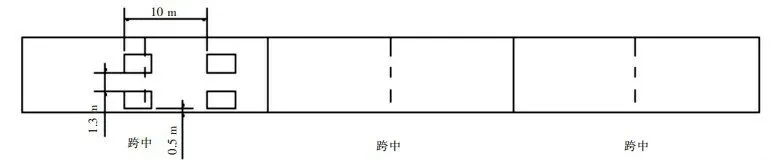
图1 加载工况一
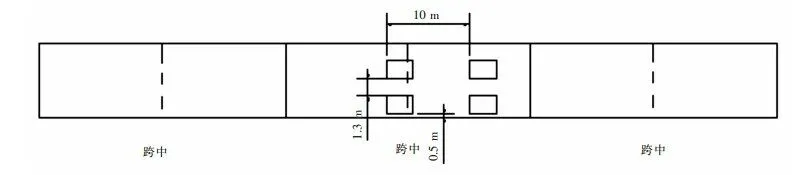
图2 加载工况二
为了保证加载顺利进行,在不影响结构性能的条件下可以对各个工况进行细化分类,主要分为四级加载施工,且每次加载应用一辆车进行。按照该项目的技术标准要求,并结合试验规定,静载效率为0.8~1.05。工况一:对第一跨位置进行检测,该跨设计荷载以及试验荷载、实验效率分别为5162.78kN·m、5105.47kN·m、0.99;工况二:第二跨中检测点位截面,其设计荷载、试压荷载、实验效率分别为:4233.18kN·m、4275.51kN·m、1.01。通过不同工况分析,两种工况下荷载效率全部达到技术标准的要求。
4.3 数据处理
通过对桥梁项目开展形变量的检测,了解到形变数据信息,使数据精度达到标准要求,一般其可以达到毫米级,甚至能够达到亚毫米级,周期效果比较高。在采集数据环节,应该应用数据扫描仪器掌握必要的点面云数据信息;另外,还应该设置8 个反射片结构,做好数据精度的扫描和控制,并结合具体的测量工作需要,保证测量结束后能够进行拼接作业。有些传感器中融合了三维扫描的方式,因此需要严格控制点云数据偏差,使其不能影响整体数据精度信息。在点云数据的采集作业阶段,需要在具体实施前预先设定保证各项工作方案,然后再进行扫描方式确定。在这一方面的数据处理过程中,可以通过Gauss 滤波函数完成数据处理,消除噪声等污染影响,去除各项多余的数据信息,然后进行各项样品数据的使用。在数据采集完成后,通过后处理的软件可以实现截面贯穿的控制,并且准确掌握拱梁夹角、半径等方面的信息,从而提高数据精度要求[4]。
5 三维激光扫描检测结果分析
通过对该桥梁进行两个工况方面的扫描和控制,同时做好桥梁的加载处理,就能够掌握相应的工况条件下位移量参数。除此之外,整体模型与箱底结构部分进行扫描,然后在空间软件分析数据处理之后可以得到结果,其数据值参考表1。
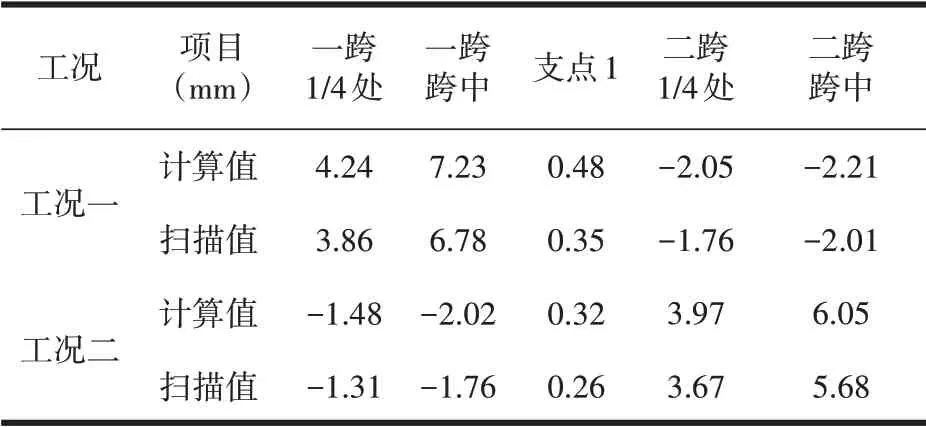
表1 实验理论计算值与实测结果分析
激光扫描值相差比较小,且各个数据并未超出0.5mm 的要求。通过分析可以发现,理论参数和实际测量数据有明显的差异,或者在应用三维激光扫描技术过程中,位移选点的误差会比较明显[5]。从实际情况分析,在桥梁检测实践中,三维激光扫描技术的测量精度可以达到要求,尤其是桥梁投入运营时间长、资料不完善的情况下,利用该方法可以提升测量精度,其实际应用价值比较高。
6 结语
综上所述,三维激光扫描作为新型技术应用到桥梁检测中,尤其是对于大中修阶段,有着非常好的效果。该检测技术效果比较好,可以提升数据精度,且对各个部分都能够深入了解情况,同时为桥梁加固施工提供基础,为交通运行质量提高奠定坚实的基础。
