油菜无人机飞播装置设计与试验
2020-09-21张青松廖庆喜廖宜涛舒彩霞
张青松,张 恺,廖庆喜,廖宜涛,王 磊,舒彩霞
·农业航空工程·
油菜无人机飞播装置设计与试验
张青松,张 恺,廖庆喜,廖宜涛,王 磊,舒彩霞
(1. 华中农业大学工学院,武汉 430070;2. 农业农村部长江中下游农业装备重点实验室,武汉 430070)
针对丘陵山区油菜种植面积逐步扩大和平原地区稻油茬口矛盾突出的生产现状,结合无人机飞播作业不受地形限制、作业速度快、工作效率高和适用范围广等优点,该研究开发了与极飞P20四旋翼无人机平台配套的油菜无人机飞播装置和控制系统。分析确定了飞播装置种箱、充种漏斗、槽轮等的结构参数,并研制了相应的控制系统。在分析无人机飞播质量影响要素基础上,建立了无人机旋翼气流场仿真模型,并以充种漏斗长度和槽轮转速为试验因素开展台架试验。仿真分析和台架试验结果表明,旋翼气流场对油菜种子的空中漂移运动轨迹有较大影响,根据获得的无人机飞行速度与槽轮转速关系模型,确定了旋翼气流场对种子影响较小的参数组合:导种管出种口与无人机旋翼距离300 mm,充种漏斗长度53 mm,槽轮转速10~50 r/min、无人机飞行速度2~4 m/s。场地试验表明:导种管出种口横向距离为1.1 m,无人机飞行高度为2~2.5 m时,无人机有效作业幅宽2.15~2.45 m,种子分布均匀性变异系数为32.05%~34.78%,装置作业性能较好,满足油菜农艺种植要求。研究结果可为油菜无人机飞播配套装置设计提供参考。
无人机;试验;飞播;油菜;排种装置;控制系统
0 引 言
油菜是中国重要的油料作物,广泛种植于长江中下游地区,具有菜用、饲用、肥用、花用、蜜用等功能[1-2]。长江中下游平原地区稻油茬口矛盾突出,为抢农时,部分田块种植油菜时直接旋耕、开沟整地后进行人工撒播,作业效率低且播种均匀性难以保证[3-4]。而丘陵山区地形地貌复杂,地块较小,地势不平坦,不便于现有油菜精量联合直播机进行机械化作业[5-6]。无人机飞播作业不受地形限制,具有作业速度快、工作效率高和适用范围广等优点[7]。运用无人机开展油菜飞播作业,可以提高播种均匀性,减少人工投入和提高作业效率,且可在不便于机械作业地区进行油菜种植。
国内外学者对无人机在农业生产上的应用开展了相关研究,包括病虫害信息监测,农田地理信息获取,农作物长势预测,农作物播种、施肥、施药等[8-11]。在无人机飞播技术研究方面,陈雄飞等[12]设计了一种离心摆管式播种无人机,利用离心力的作用把进入摆管的种子从摆管末端抛撒出去。包胜军[13]通过控制所设计的无人机飞播装置闸门移动来改变出料口大小,调节播量,实现飞播作业。黄小毛等[14]设计了一种基于电驱离心条播式排种器的无人机飞播装置,并通过专用导种装置实现无人机播种作业,但使用时需要在无人机下方人工衔接导种装置,需要考虑操作安全性及便利性等因素。无人机飞播的排种器一般选用集排器,可实现高速、高效作业,气力式集排器由于其结构复杂,整体质量大,不适合作为飞播排种器[15-18];而机械式集排器由于结构简单、质量轻,飞播作业普遍选用[19-23]。
针对丘陵山区油菜种植面积逐步扩大和原地区稻油茬口矛盾突出的生产现状,结合油菜无人机飞播技术具有作业速度快、工作效率高、适用范围广、操作便利等优点,本研究开发了与无人机平台相配套的油菜无人机飞播装置,对排种装置和飞播控制系统进行设计,通过数值仿真和台架试验分析了影响装置飞播作业质量的因素,确定了最优作业参数,并通过场地试验验证装置作业效果,以期为油菜无人机播种技术与配套装置设计提供参考。
1 总体结构与工作原理
油菜无人机飞播装置以无人机作为动力平台,由排种装置和飞播控制系统组成,总体结构如图1a所示。无人机平台选用极飞P20四旋翼无人机。排种装置和飞播控制系统机载部分固定在无人机平台上,排种装置由种箱、充种漏斗、槽轮、外壳等组成,如图1b所示。槽轮通过联轴器与步进电机连接,落种口处通过快速接头与导种管链接,各导种管出种口固定在无人机旋翼下方的出种口支撑架上并均匀分布。
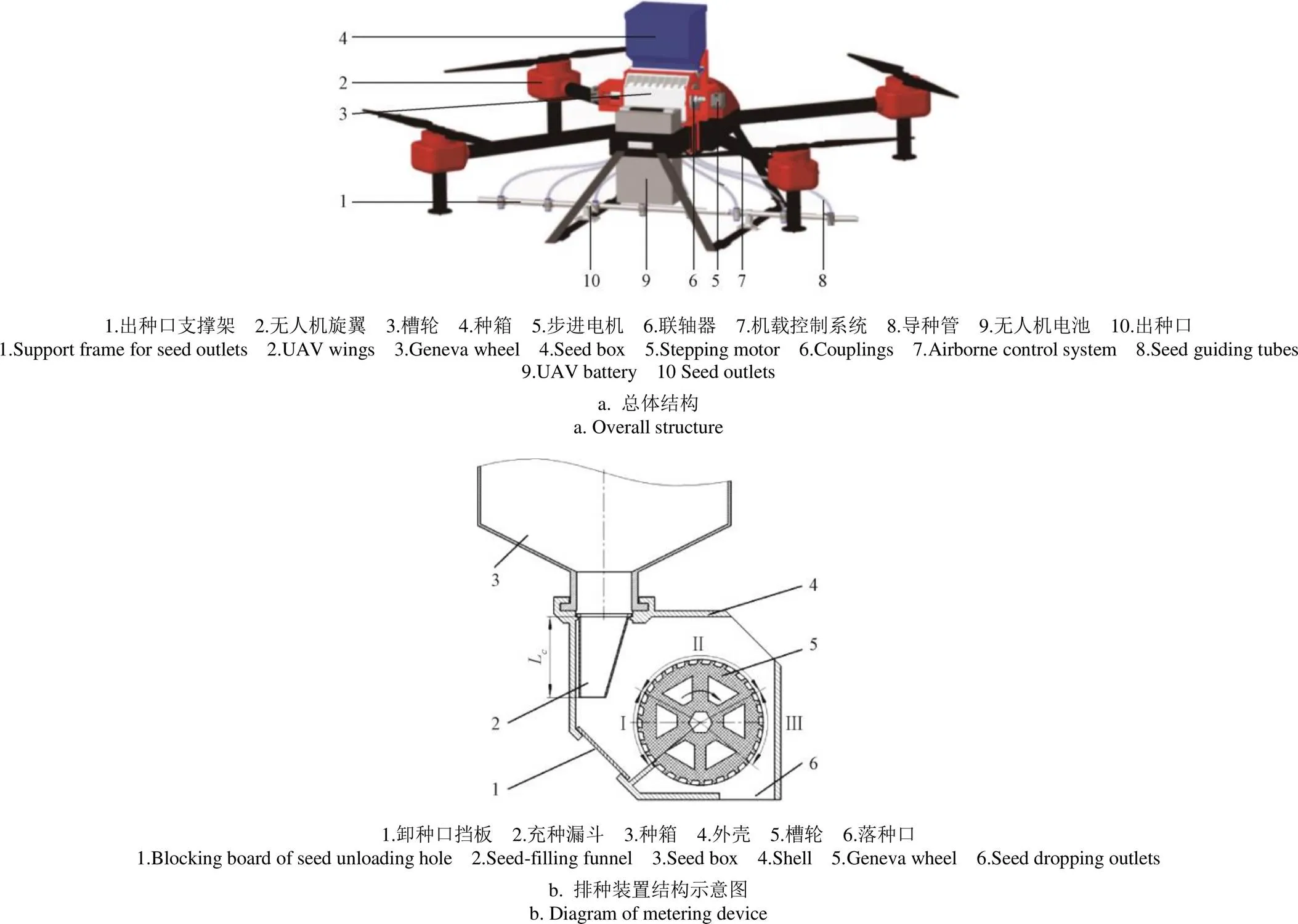
注:Ⅰ为充种区;Ⅱ为携种区;Ⅲ为投种区;Lc为充种漏斗长度,mm。
排种装置工作过程包括充种、携种和投种3个过程。工作时,飞播控制系统根据无人机飞行状态调节步进电机转速,控制排种装置槽轮转速,排种装置开始飞播作业,种箱内的油菜种子在重力作用下由种箱经充种漏斗下落至槽轮充种区,槽轮旋转,充种区的种子被槽轮型孔“囊取”后,在型孔的约束下到达投种区,在重力和离心力的共同作用下脱离型孔,经过导种管从出种口流出,各出种口排出的种子经无人机旋翼下方气流场的扰动后落入地表,完成飞播作业。基于长江中下游地区地块大小、无人机一次作业飞行时间和起飞载荷等因素综合考虑,设计无人机飞飞行速度为2~4 m/s,作业幅宽为2~2.5 m,导种管出种口数量为8个且均布在出种口支撑架上,出种口离地高度为1~3 m,一次作业飞播面积最多为0.67 hm2。
2 飞播装置结构参数确定
2.1 排种装置
2.1.1 种箱容积
根据长江中下游地区的油菜种植农艺要求,油菜播量为3.75~5.25kg/hm2,由于飞播播量较大,取播量为5.25 kg/hm2,无人机续航能力为10~13 min,除去起飞、降落、往返等所需时间,确定种箱容积为:
式中为种箱容积,L;S为一次飞行播种面积,hm2,S=0.67;s为油菜播量,kg/hm2,s=5.25;ρ为华油杂62油菜种子容重,kg/m3,ρ=680,计算得种箱容积设计为5.2 L。
2.1.2 槽轮
槽轮直径、型孔结构和数量对飞播作业性能有较大影响。根据槽轮排量公式[24]可知,当播量和作业速度一定时,槽轮型孔数量与槽轮转速成反比。若槽轮直径过小,则槽轮转速较高,会导致种子破损率增加;若槽轮直径过大,则排种装置体积大,不适于无人机飞播作业。综合考虑,本文槽轮直径设计为80 mm[25],如图2a所示,每圈30个型孔,各圈交错排列,相邻型孔圆心角为12°。
无人机飞播作业时,槽轮转速大,在充种阶段油菜种子需快速囊入型孔,在投种阶段型孔内油菜种子需及时脱离型孔排出,本文槽轮型孔设计为斜置锥柱形,如图2b所示,型孔具有一定倾斜角和锥角,型孔孔口斜置且外张,以利于快速充种和投种。作业时,为保证快速飞行作业时的排种量,设计每个型孔充入6~10粒。根据播种排种器槽轮参数设计公式[24]可知:

式中max为充入型孔的油菜种子群长度,mm;1为油菜种子高,mm;为槽轮型孔宽度,mm。
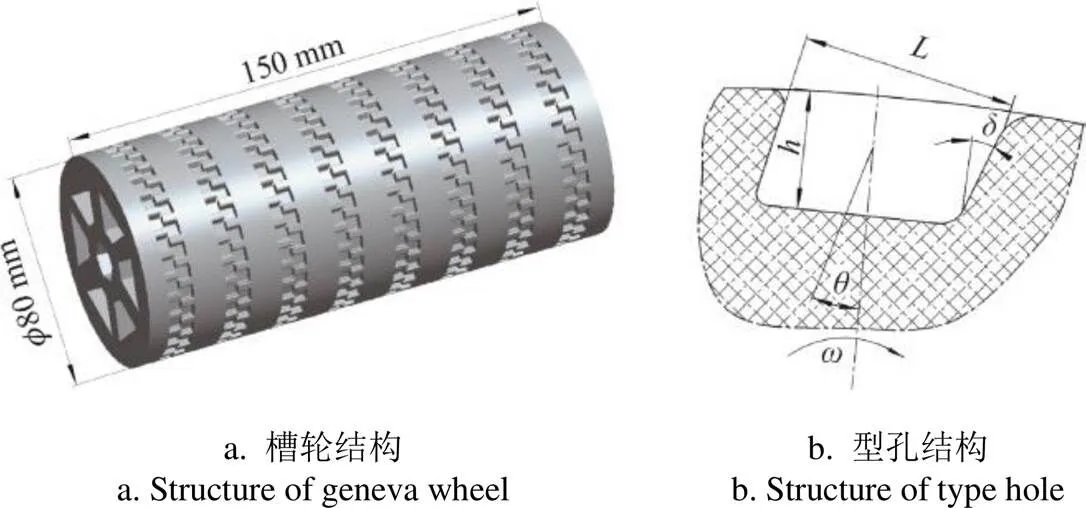
注:L为型孔长度,mm;h为型孔深度,mm;δ为型孔锥角,(°);θ为型孔倾斜角,(°);ω为槽轮角速度,rad·s-1。
油菜种子流动性好,华油杂62油菜种子平均尺寸(长 ×宽×高)为2.03 mm×1.87 mm×1.92 mm,形状为类球形,球形度0.96,当量直径1.94 mm[26],据此设计槽轮型孔长度为5 mm,宽度为5 mm,深度为3 mm,取槽轮型孔倾斜角为20°,锥角为18°。
2.1.3 充种漏斗
充种区种群厚度直接影响槽轮充种性能。在种箱和槽轮之间安装充种漏斗,以控制充种区种群厚度。如图3所示,充种漏斗上方进口设计为长方形,其长为30 mm,宽为18 mm,下方出口设计为圆形,其直径为15 mm,8个充种漏斗并排安装在种箱下方。
充种漏斗长度L是影响槽轮充种区种群厚度的关键因素,直接影响槽轮充种性能。根据飞播装置的结构尺寸,取充种漏斗长度L为49~65 mm。
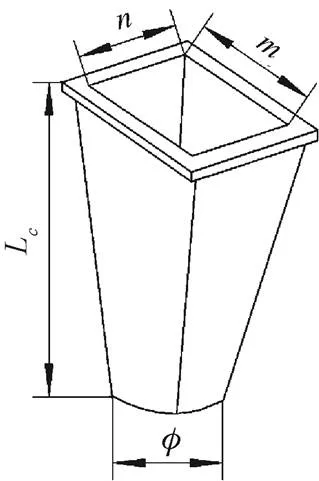
注:m为充种漏斗进口长方形的长度,mm;n为充种漏斗上方进口长方形宽度,mm;φ为充种漏斗圆形出口直径,mm。
2.2 飞播控制系统
飞播控制系统根据无人机飞行信息控制飞播装置作业。为便于操作,飞播控制系统独立于无人机飞行控制系统,由机载控制系统和手持遥控系统2部分组成。机载控制系统主要由主控制器(STM32F4单片机)、北斗导航芯片(芯片型号ATK-S1216F8-BD)、压电传感器、步进电机(型号42HS4813A4CEL06)及其驱动器、飞行信息检测模块、无线传输模块(模块型号E32-TTL-100)、电源模块等组成;手持遥控器系统主要由控制器、显示屏、无线传输模块、电源模块和按键组成。飞播控制系统结构框图和系统组成如图4所示。
作业时,手持遥控系统与机载控制系统通讯,获取无人机飞行信息,控制排种速率。电源模块为飞播控制系统各部件提供动力。飞播作业开始前,利用手持遥控系统设定作业模式、单位面积播量和步进电机转速等。作业过程中,手持遥控系统和机载控制系统通过无线传输模块互发作业指令和作业状态信息。无人机进入作业区域,飞行信息检测模块检测无人机位置信息,判断无人机是否处于作业区域并控制飞播装置播种启停。安装于种箱内的压电传感器获取种箱内种子余量信息,北斗导航芯片实时获取无人机飞行速度信息,机载控制系统根据无人机飞行速度与电机转速计算出槽轮转速,调节排种速率,保证飞播均匀性。无人机飞出作业区域时,手持遥控系统发出停止作业指令,装置停止工作,无人机返回。
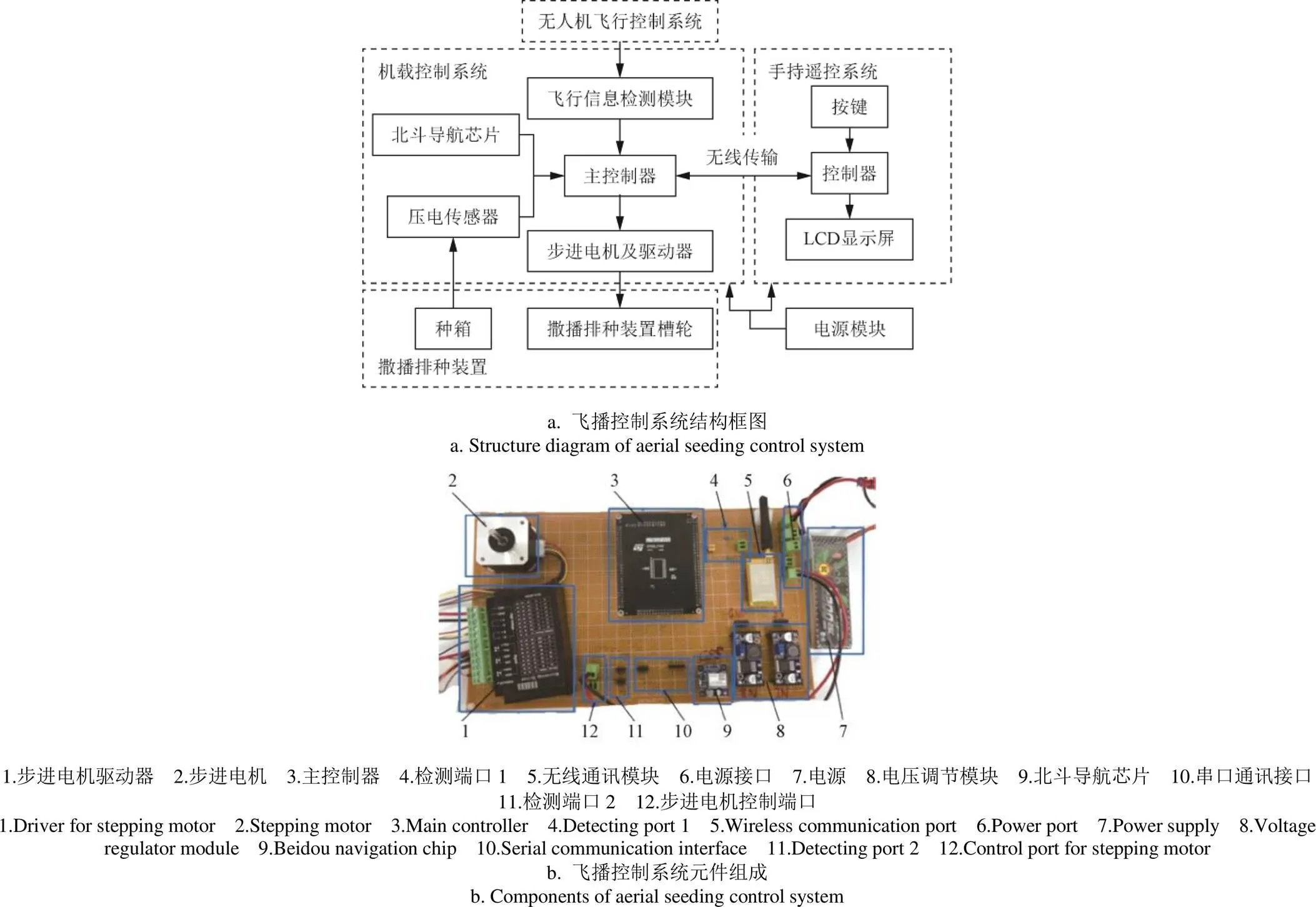
图4 飞播装置控制系统
3 飞播作业质量影响因素试验分析
3.1 试验目的
田间作业时,从出种口落出的油菜种子经旋翼下方气流场的扰动后落入地表,飞播作业质量受无人机旋翼气流场影响较大[11],充种漏斗长度和槽轮转速影响槽轮充种性能和排量,进而影响播量。因此开展无人机旋翼气流场、飞播装置充种漏斗长度和槽轮转速对油菜无人机飞播装置作业质量影响规律的试验研究。
3.2 试验材料与方法
本文通过数值仿真试验方法,分析旋翼气流场对油菜种子下落过程的影响。无人机作业时,旋翼数量、翼型、轴距等对无人机旋翼气流场具有重要影响,极飞P20四旋翼无人机旋翼形状较为复杂,为获取旋翼精确尺寸,利用3D扫描仪获得旋翼空间曲面云点数据,构建旋翼三维模型。其中无人机旋翼轴距为1 500 mm,旋翼桨叶直径为740 mm。飞播作业时,由于无人机机身部件主要位于旋翼上方,因此对无人机模型进行简化,只保留无人机旋翼部分,建立油菜无人机飞播装置仿真模型[27-30],如图5所示。仿真时,依据无人机旋翼转速范围2 000~40 000 r/min设置旋翼转速为3 000 r/min。旋翼扰动的气流场计算域设置为直径5 m,高5 m的圆柱体,4个旋翼桨叶的旋转区域设置为动域,其余区域设置为静域,无人机飞行高度设置为3 m,依据长江中下游稻油轮作区作业工况及无人机续航和承载能力,设置飞行速度为2.5 m/s。

1.地面 2.油菜种子 3.无人机旋翼 4.飞播装置
开展台架试验分析充种漏斗长度和槽轮转速对排种速率影响,如图6所示,试验材料为华油杂62,含水率为7.15%,千粒质量为4.87 g,以充种漏斗长度L和槽轮转速为试验因素,以槽轮排种速率V(1 min内飞播装置排种量)、各行排量一致性变异系数、总排量稳定性变异系数和破损率为评价指标,按照GB/T 9478—2005开展试验,其中,充种漏斗长度设置5个水平,分别为49、53、57、61和65 mm,槽轮转速设置5个水平,分别为10、20、30、40和50 r/min。试验时,每个导种管出种口下方放置量杯,收集每行的油菜种子。稳定排种1 min后停止,用精度为0.001 g的天平分别称取每个称量杯内油菜籽质量,试验重复5次,依次记录并计算槽轮排种速率、各行排量一致性变异系数、总排量稳定性变异系数和破损率。

1.量杯 2.导种管 3.机载控制系统 4.槽轮 5.种箱 6.步进电机 7.联轴器 8.快速接头
3.3 结果与分析
3.3.1 旋翼气流场对油菜种子下落影响
无人机旋翼气流场云图如图7所示,由图7可看出,无人机旋翼对其下方气流的扰动非常大,气流速度最高达12 m/s,处于每个旋翼正下方,但在旋翼对称中心区域存在气流速度小于1 m/s的低速气流区域;在旋翼下方0.5 m内,各旋翼的气流区域相对独立。从0.5 m处开始,各旋翼气流的扰动区域出现交叉重叠,到旋翼下方2.5 m处,各旋翼气流扰动完全融合;气流场的气流速度随与旋翼距离的增大而减小,而旋翼气流扰动区域随与旋翼距离的增大而逐渐变大。为减少无人机旋翼气流场对油菜种子下落的影响,应使飞播装置出种口位于低速气流区域,本文设计出种口支撑架距旋翼距离为300 mm。
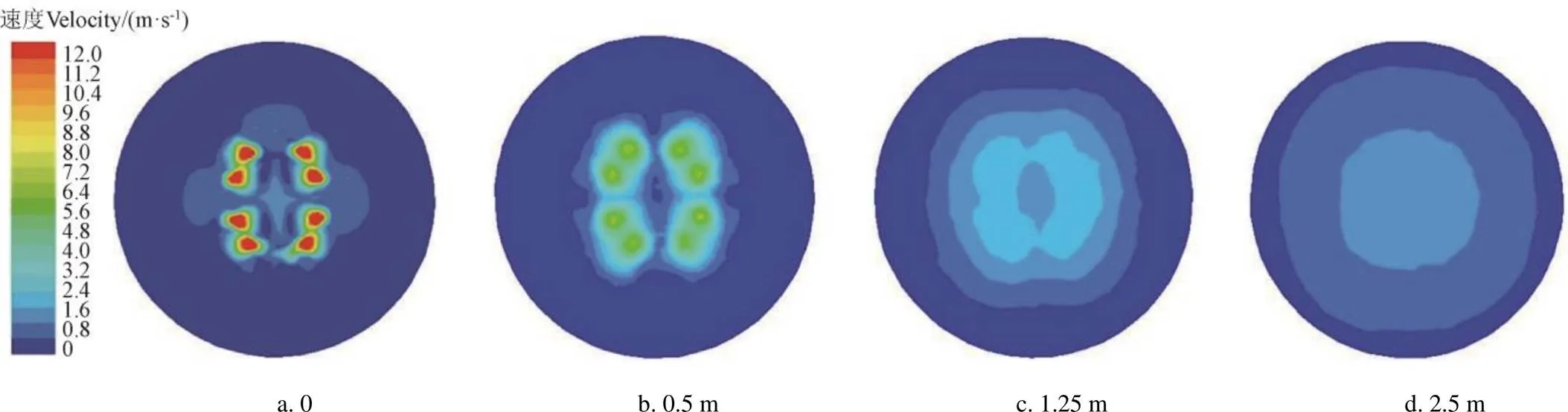
图7 无人机旋翼下不同距离水平面的气流速度云图
油菜种子分别在有旋翼气流场和无旋翼气流场的空中漂移轨迹如图8所示,当无旋翼气流场存在时,从导种管出种口排出的油菜种子主要受到重力作用向下运动并落至地表。当有旋翼气流场存在时,油菜种子从导种管出种口排出后,受旋翼气流影响,呈随机发散漂移运动状态。旋翼气流场仿真结果表明,无人机旋翼气流场对油菜种子空中漂移运动有较大影响,无人机飞行高度越高,受旋翼影响的空间气流区域越大,油菜种子漂移范围越大,落入地表的油菜种子分布区域也越大。结合飞播作业幅宽要求,设定飞播作业飞行高度不超过3 m。
3.3.2 充种漏斗长度和槽轮转速对排种速率影响
台架试验结果如表1所示。由表1可知,各行排量一致性变异系数小于3.70%,总排量稳定性变异系数小于3.19%,种子破损率小于0.02%。槽轮排种速率随充种漏斗长度和槽轮转速的增加而减小。这是因为当充种漏斗长度较大时,充种区种群厚度小,致使种群压力小,槽轮单个型孔充种粒数减少,槽轮排量减小;当槽轮转速较高时,每个型孔经过充种区所用时间变短,使槽轮单个型孔充种粒数减少,槽轮排量减小。
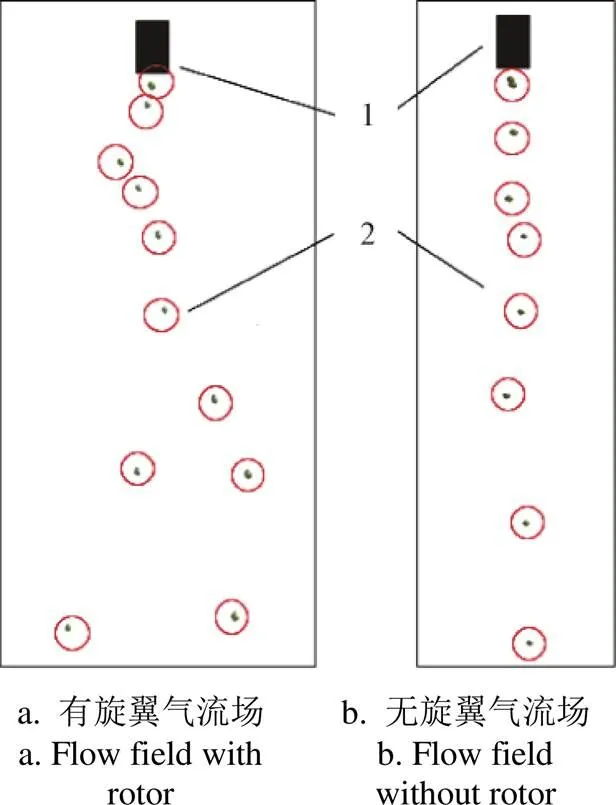
1. 导种管出种口 2. 油菜种子
飞播作业时,设无人机飞行速度为m,作业幅宽为,播量为s,槽轮排种速率V,则有:
式中v为无人机飞行速度,m/s;为作业幅宽,m;Q为播量,g/hm2;V为槽轮排种速率,g/min。
油菜无人机飞播装置作业速度为2~4 m/s,作业幅宽为2~2.5 m,按播量5.25 kg/hm2,根据公式(3)计算可得槽轮排种速率为126.01~315.03 g/min,在槽轮转速范围为10~50 r/min时,充种漏斗长度取53 mm时满足设计要求。
根据表1试验结果,建立槽轮排种速率V与槽轮转速之间的函数关系模型,结果如式(4)所示,拟合方程决定系数2为0.999 8。

式中为槽轮转速,r/min,=10~50。
为验证该模型准确性,以槽轮转速为试验因素,取15、25、35和45 r/min四个水平,以槽轮排种速率V为试验指标,开展台架验证试验,每个水平试验重复5次取平均值,试验结果如表2所示。

表1 飞播装置台架试验结果
由表2可知,在转速为15~35 r/min范围时,预测值与试验值接近,误差不高于0.29%;在转速为45 r/min时误差最大,为2.71%。试验结果表明,公式(3)可以表征槽轮排种速率V与槽轮转速之间的函数关系。联立公式(3)和公式(4,当播量和作业幅宽一定时,无人机飞行速度v与槽轮转速(步进电机转速)的关系可表示为公式(5)示。油菜无人机飞播装置田间作业时,机具振动、粉尘、地表起伏等因素影响小,排种器作业环境与台架试验接近,依据公式(5)设定槽轮转速,播量稳定性和作业质量可得到保证。

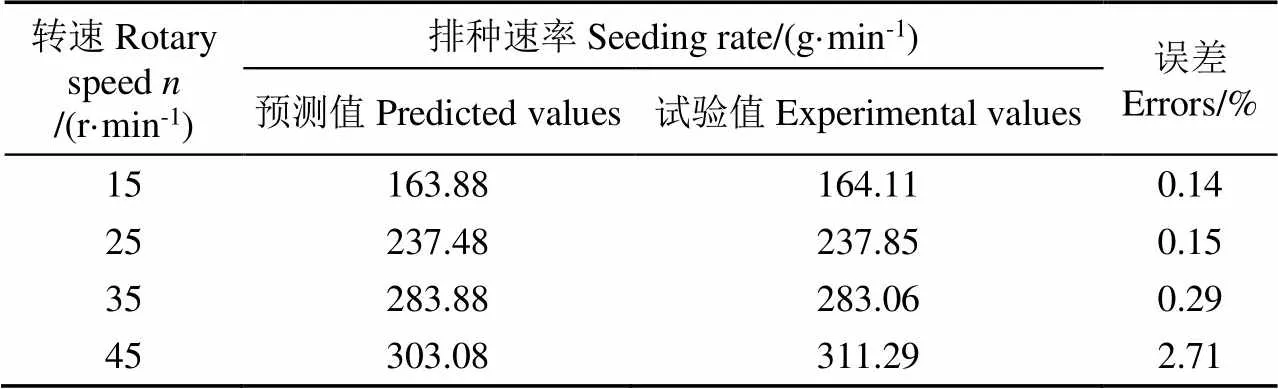
表2 排种速率验证试验结果
4 场地试验
4.1 试验材料与方法
油菜无人机飞播作业时,其播种幅宽受导种管出种口横向距离(即出种口支撑架上2个最外侧导种管出种口间距离)和无人机飞行高影响。在华中农业大学农业机械实训中心开展场地试验,如图9a所示,试验材料有华油杂62油菜种子、镜面田块、抹泥刀、采样单元和油菜无人机飞播装置等。镜面田块如图9b所示,在1 100 mm×650 mm的金属容器框内放入适量软泥土并用抹泥刀抹平,用于模拟田间地面情况。采样工具为200 mm×200 mm的金属框,以统计镜面田块某区域内种子分布数量。
试验场地布置如图9c所示,试验时天气晴朗,无自然风。由于目前尚无具体油菜飞播作业场地试验指导标准,试验时设置测试场地长度约20 m,采集区域前后各设置7.5 m缓冲区,采集区域由3条采集带组成,各采集带间隔0.7 m,每条采集带由4个镜面田块拼成。设置无人机航线与场地中轴线重合,利用手持遥控终端设置无人机飞行速度、高度等作业参数。作业过程中,落入镜面田块的种子被泥土粘附。测量数据后,利用抹泥刀将镜面田块抹平,表面的油菜种子被抹入泥土,可继续开展下组试验。
4.2 试验因素与指标
以导种管出种口横向距离和无人机飞行高度为试验因素,以有效作业幅宽和种子分布均匀性变异系数为试验指标,开展单因素试验。由于无人机尺寸限制,经前期试验测定,导种管出种口横向距离最大取1.1 m时,油菜种子从落种口进入导种管后,能够在重力的作用下顺利从出种口排出,因此导种管出种口横向距离设4个水平,分别为0.8、0.9、1.0和1.1 m。根据农用无人机常用飞行高度1~3 m,无人机飞行高度设5水平,分别为1、1.5、2、2.5和3 m。试验时,无人机飞行速度设为2.5 m/s,槽轮转速设为17 r/min。
按播量5.25 kg/hm2计算,采样单元内有4~5粒油菜种子即满足油菜飞播作业要求。测量有效作业幅宽时,将2个采样单元从航线中轴线与采集带中轴线交点开始,沿各采集带中轴线分别向两端移动,当采样单元内油菜种子数量不满足要求时,停止移动。利用卷尺测量2个采样单元之间的距离,记为在该采集带上的有效幅宽,分别测量3条采集带上的有效幅宽,取平均值,试验重复3次,取3次试验平均值作为最终飞播有效幅宽。
统计种子分布均匀性时,在测量出的有效幅宽之间,沿采集带中轴线均匀布置5个采集单元。记录各采集单元内油菜种子数,以各采集单元的种子均值计算种子分布均匀性变异系数。
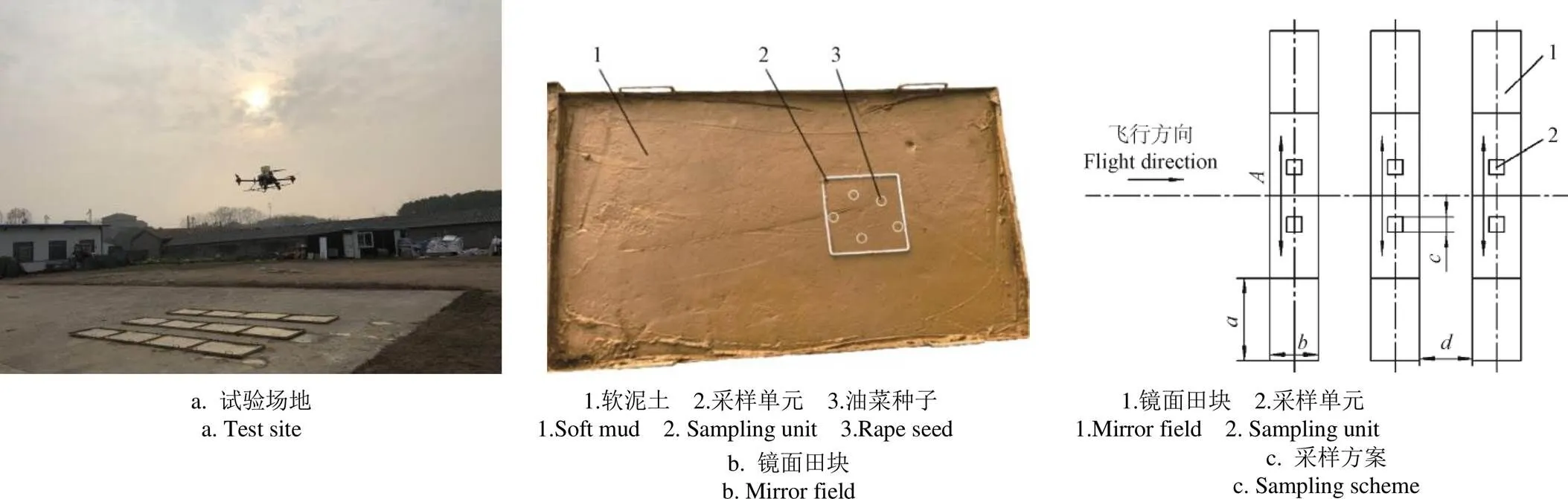
注:A为采样单元移动方向;a为镜面田块长度,a=1 100 mm;b为镜面田块宽度,b=650 mm;c为采样单元长度,c=200 mm;d为采集带间隔距离,d=700 mm。
4.3 结果与分析
开展导种管出种口横向距离单因素试验,飞行高度取中位水平值2 m,导种管出种口横向距离对飞播作业影响如图10a所示。由图可知,导种管出种口横向距离对有效作业幅宽和种子分布均匀性变异系数有较大影响。有效作业幅宽随导种管出种口横向距离的增加而增大,而种子分布均匀性变异系数随导种管出种口横向距离的增大而减小。当导种管出种口横向距离取1.1 m时,有效作业幅宽为2.15 m,种子分布均匀性变异系数为33.17%,作业效果较好。
开展无人机飞行高度单因素试验,导种管出种口横向距离取1.1 m,无人机飞行高度对飞播作业效果影响如图10b所示,由图可知,无人机飞行高度对有效作业幅宽和种子分布均匀性也具有较大影响。有效作业幅宽随无人机飞行高度的增加而增加,其中飞行高度为1.5~2.5 m时,有效作业幅宽增幅不大。种子分布均匀性变异系数随飞行高度的增加呈先增加后趋于稳定的趋势,当飞行高度大于2.0 m时,种子分布均匀性变异系数趋于稳定。当飞行高度1.0~1.5 m时,种子分布均匀性较好,但田间作业飞行高度较低时,旋翼气流对已落地的种子有较大影响,且近地飞行不利于无人机安全作业。
综合考虑,选取导种管出种口横向距离为1.1 m、飞行高度为2~2.5 m作为油菜无人机飞播装置作业参数,此时有效作业幅宽为2.15~2.45 m,种子分布均匀性变异系数为32.05%~34.78%,符合NY/T 2709—2015油菜播种机作业质量标准规定播种均匀性变异系数不大于45%要求[31],油菜无人机飞播装置作业质量满足油菜种植农艺要求。
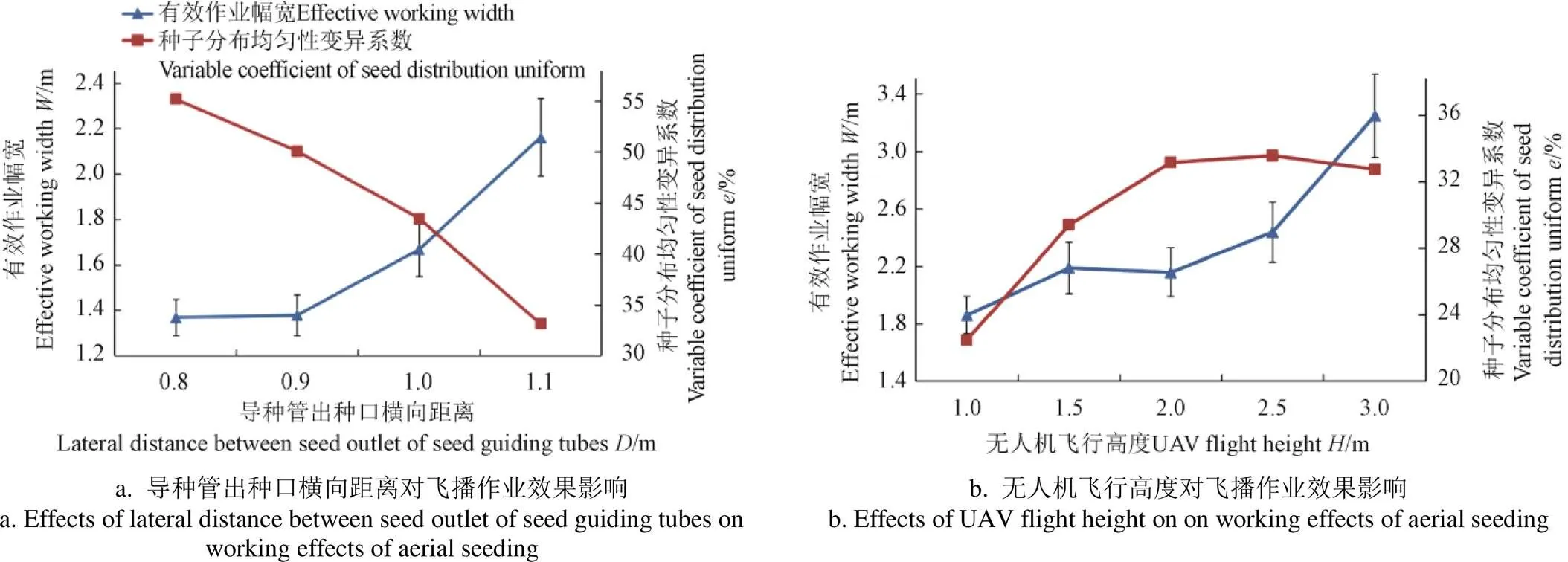
图10 场地试验结果
为验证油菜无人机飞播装置田间作业效果,2019年11月在华中农业大学现代农业种植示范基地开展田间飞播试验,试验地块在无人机飞播作业前已旋耕整理好。试验时,天气晴朗微风,油菜种子选用华油杂62,无人机飞行速度为2.5 m/s,飞行高度为2 m。由于试验地块墒情较差,为保证出苗,实际作业播量比设计值偏高,槽轮转速(步进电机转速)设置为25 r/min,此时有效作业幅宽为2.15 m,播量为7.35 kg/hm2。播种11 d后,随机选5处,每处框选1 m2区域统计出苗数及种子分布均匀性。结果表明,平均出苗密度为64.5株/m2,种子分布均匀性变异系数为38.23%,满足油菜农艺种植要求。
5 讨 论
油菜无人机飞播装置进行场地试验时,由于目前尚无具体油菜飞播作业场地试验指导标准,采集带数量设置为3,间距设置为700 mm,采集样本数量较少,可能导致试验误差较大,后续需要对场地试验采集带数量及间距进行规范,增加采集样本数量。同时,油菜无人机飞播装置可以适应多种工况的地表,如面积大小不同的山地、坡地、滩涂地和平原田地等。地表工况影响油菜种子落入地表时的弹跳程度,进而影响油菜无人机飞播装置作业幅宽和种子分布均匀性。同时,在实际生产作业中,由于天气原因及农时限制,在个别情况下,不得不在有自然风工况下开展生产作业。为了提高飞播装置田间作业适应性,后续需进一步系统开展田间试验研究。
6 结 论
1)针对丘陵山区油菜种植面积逐步扩大和平原区域稻油茬口矛盾突出的生产现状,开发了与无人机平台相配套的油菜无人机飞播装置,通过飞播控制系统调节排种装置槽轮排种速率,保证飞播作业播量,实现无人机不同飞行速度飞播作业。
2)分析确定了飞播装置种箱容积为5.2 L,充种漏斗上方进口为30 mm×18 mm长方形,下方出口为直径15 mm圆形,槽轮直径为80 mm,每圈30个型孔,采用交错槽排列,相邻型孔对应中心角为12°。飞播控制系统包括机载控制系统和手持遥控系统2部分组成,作业时,手持遥控器系统与机载控制系统通讯,获取无人机飞行信息,控制排种装置排种速率。
3)通过建立无人机旋翼气流场仿真模型得出旋翼气流场对油菜种子空中漂移运动轨迹有较大影响,确定了飞播装置导种管出种口距旋翼距离为300 mm;以充种漏斗长度和槽轮转速为试验因素开展了全因子试验,获得了无人机飞行速度与槽轮转速关系模型,得出充种漏斗长度为53 mm,槽轮转速为10~50 r/min时,满足飞行速度为2~4 m/s,播量为5.25 kg/hm2的作业要求。
4)开展场地试验,确定了导种管出种口横向距离为1.1 m,无人机飞行高度为2~2.5 m时,油菜无人机飞播装置作业质量较好,飞播有效作业幅宽为2.15~2.45 m,种子分布均匀性变异系数为32.05%~34.78%,播量为5.25 kg/hm2。田间试验的平均出苗密度为64.5株/m2,种子分布均匀性变异系数为38.23%,满足油菜农艺种植要求。
[1] 廖庆喜,雷小龙,廖宜涛,等. 油菜精量播种技术研究进展[J]. 农业机械学报, 2017, 48(9):1-16. Liao Qingxi, Lei Xiaolong, Liao Yitao, et a1. Research progress of precision seeding for rapeseed[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(9): 1-16. (in Chinese with English abstract)
[2] 张青松,廖庆喜,肖文立,等. 油菜种植耕整地技术装备研究与发展[J]. 中国油料作物学报,2018,40(5):702-711. Zhang Qingsong, Liao Qingxi, Xiao Wenli, et a1. Research process of tillage technology and equipment for rapeseed growing[J]. Chinese Journal of Oil Crop Sciences, 2018, 40(5): 702-711. (in Chinese with English abstract)
[3] 刘立超,张青松,肖文立,等. 油菜机械直播作业厢面地表粗糙度测量与分析[J]. 农业工程学报,2019,35(12):38-47. Liu Lichao, Zhang Qingsong, Xiao Wenli, et al. Measurement and analysis of surface roughness of rapeseed mechanized direct seeding operation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(12): 38-47. (in Chinese with English abstract)
[4] 王磊,廖宜涛,张青松,等. 油麦兼用型精量宽幅免耕播种机仿形凿式开沟器研究[J]. 农业机械学报,2019,50(11):63-73. Wang Lei, Liao Yitao, Zhang Qingsong, et al. Design on profiling chisel opener of precision broad width no-tillage planter for rapeseed and wheat[J]. Transactions of the Chinese Society forAgricultural Machinery, 2019,50(11): 63-73. (in Chinese with English abstract)
[5] 廖庆喜. 油菜生产机械化技术[M]. 北京:科学出版社,2018.
[6] 廖宜涛,舒彩霞,廖庆喜,等. 油菜精量直播机气力式排种系统稳压控制方法与试验[J]. 农业工程学报,2017,33(15):49-56. Liao Yitao, Shu Caixia, Liao Qingxi, et al. Air pressure stabilizing method and experiment of pneumatic seed-metering system of precision rapeseed planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(15): 49-56. (in Chinese with English abstract)
[7] Bochtis Dionysis D, Sorensen Claus G C, Busato Patrizia. Advances in agricultural machinery management: A review[J]. Biosystems Engineering, 2014(126): 69-81.
[8] 刘忠,万炜,黄晋宇,等. 基于无人机遥感的农作物长势关键参数反演研究进展[J]. 农业工程学报,2018,34(24):60-71. Liu Zhong, Wan Wei, Huang Jinyu, et al. Progress on key parameters inversion of crop growth based on unmanned aerial vehicle remote sensing[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(24): 60-71. (in Chinese with English abstract)
[9] 徐博,陈立平,徐旻,等. 多作业区域植保无人机航线规划算法[J]. 农业机械学报,2017,48(2):75-81. Xu Bo, Chen Liping, Xu Min, et al. Path planning algorithm for plant protection UAVs in multiple operation areas[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017,48(2): 75-81. (in Chinese with English abstract)
[10] 兰玉彬,朱梓豪,邓小玲,等. 基于无人机高光谱遥感的柑橘黄龙病植株的监测与分类[J]. 农业工程学报,2019,35(3):92-100. Lan Yubin, Zhu Zihao, Deng Xiaoling, et al. Monitoring and classification of citrus Huanglongbing based on UAV hyperspectral remote sensing[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(3): 92-100. (in Chinese with English abstract)
[11] 李继宇,兰玉彬,施叶茵. 旋翼无人机气流特征及大田施药作业研究进展[J]. 农业工程学报,2018,34(12):104-118. Li Jiyu, Lan Yubin, Shi Yeyin. Research progress on airflow characteristics and field pesticide application system of rotary-wing UAV[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(12): 104-118. (in Chinese with English abstract)
[12] 陈雄飞,周博聪,刘木华,等. 一种离心摆管式播种无人机:CN207631497U[P]. 2018-07-20.
[13] 包胜军. 一种撒播装置及飞行撒播装置:CN106612829A[P]. 2017-05-10.
[14] 黄小毛,徐胡伟,张顺,等. 油菜成条飞播装置的设计与试验[J]. 农业工程学报,2020,36(5):78-87. Huang Xiaomao, Xu Huwei, Zhang Shun, et al. Design and experiment of a device for rapeseed strip aerial seeding[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(5): 78-87. (in Chinese with English abstract)
[15] 陈海涛,李桐辉,王洪飞,等. 气吸滚筒式垄上三行大豆密植排种器设计与参数优化[J]. 农业工程学报,2018,34(17):16-24. Chen Haitao, Li Tonghui, Wang Hongfei, et al. Design and parameter optimization of pneumatic cylinder ridgethree-row close-planting seed-metering device for soybean[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(17): 16-24. (in Chinese with English abstract)
[16] 倪向东,徐国杰,王琦,等. 气吸滚筒阵列式棉花精密排种器设计与试验[J]. 农业机械学报,2017,48(12):58-67. Ni Xiangdong, Xu Guojie, Wang Qi, et al. Design and experiment of pneumatic cylinder array precision seed-metering device for cotton[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(12): 58-67. (in Chinese with English abstract)
[17] 李兆东,雷小龙,曹秀英,等. 油菜精量气压式集排器的设计与试验. 农业工程学报,2015,31(7):9-17. Li Zhaodong, Lei Xiaolong, Cao Xiuying, et al. Design and experiment of pneumatic-typed precision centralized metering device for rapeseed[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(7): 9-17. (in Chinese with English abstract)
[18] 刘彩玲,魏丹,都鑫,等. 宽苗带勾型窝眼轮式小麦精量排种器设计与试验[J]. 农业机械学报,2019,50(1):75-84. Liu Cailing, Wei Dan, Du Xin, et al. Design and test of wide seedling strip wheat precision hook-hole type seed-metering device[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(1): 75-84. (in Chinese with English abstract)
[19] 曹秀英,廖宜涛,廖庆喜,等. 油菜离心式精量集排器枝状阀式分流装置设计与试验[J]. 农业机械学报,2015,46(9):77-84. Cao Xiuying, Liao Yitao, Liao Qingxi, et al. Design and experiment on valve-branch distributor of centrifugal precision metering device for rapeseed[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(9): 77-84. (in Chinese with English abstract)
[20] Van Liedekerke P, Tijskens E, Dintwa E, et al. A discrete element model for simulation of a spinning disc fertilizer spreader[J]. Single particle simulations Powder Technology, 2006, 170(2): 71-85.
[21] 宋灿灿,周志艳,姜锐,等. 气力式无人机水稻撒播装置的设计与参数优化[J]. 农业工程学报,2018,34(6):80-88. Song Cancan, Zhou Zhiyan, Jiang Rui, et al. Design and parameter optimization of pneumatic rice sowing device for unmanned aerial vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(6): 80-88. (in Chinese with English abstract)
[22] 郑启帅. 基于多旋翼无人机的油菜变量追肥技术研究[D]. 杭州:浙江大学,2019. Zheng Qishuai. Research on Variable Fertilization Technology of Rape Based on Multi-Rotor UAV[D]. Hangzhou: Zhejiang University, 2019. (in Chinese with English abstract)
[23] 张彦虎. 新疆草地农业发展模式研究[D]. 石河子:石河子大学,2015. Zhang Yanhu. The Research of Grassland Agricultural Development Model in Xinjiang[D]. Shihezhi: Shihezhi University, 2015. (in Chinese with English abstract)
[24] 中国农业机械化科学研究所. 农业机械设计手册,上册[M]. 北京:中国农业科学技术出版社,2007.
[25] 雷小龙,廖宜涛,李兆东,等. 油麦兼用型气送式集排器供种装置设计与试验[J]. 农业工程学报,2015,31(20):10-18. Lei Xiaolong, Liao Yitao, Li Zhaodong, et al. Design and experiment of seed feeding device in air-assisted centralized metering device for rapeseed and wheat[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(20): 10-18. (in Chinese with English abstract)
[26] 丛锦玲. 油菜小麦兼用型气力式精量排种系统及其机理研究[D]. 武汉:华中农业大学,2014. Cong Jinling. Study on Seeding System and Mechanism of Pneumatic Precision Metering Device for Wheat and Rapeseed[D]. Wuhan: Huazhong Agricultural University, 2014. (in Chinese with English abstract)
[27] 沈奥,周树道,王敏,等. 多旋翼无人机流场仿真分析[J]. 飞行力学,2018,36(4):29-33. Shen Ao, Zhou Shudao, Wang Min, et al. Simulation and analysis of multi-rotor UAV flow field[J]. Flight Dynmics, 2018, 36(4): 29-33. (in Chinese with English abstract)
[28] 雷小龙,廖宜涛,王磊,等. 油麦兼用型气送式集排器增压管气固两相流仿真与参数优化[J]. 农业工程学报,2017,33(19):67-75. Lei Xiaolong, Liao Yitao, Wang Lei, et al. Simulation of gas-solid two-phase flow and parameteroptimization of pressurized tube of air-assisted centralized metering device for rapeseed and wheat[J]. Transactions of the ChineseSociety of Agricultural Engineering (Transactions of the CSAE), 2017, 33(19): 67-75. (in Chinese with English abstract)
[29] 廖庆喜,张朋玲,廖宜涛,等. 基于EDEM的离心式排种器排种性能数值模拟[J]. 农业机械学报,2014,45(2):109-114. Liao Qingxi, Zhang Pengling, Liao Yitao, et al. Numerical simulation on seeding performance of centrifugal rape-seed metering device based on EDEM[J]. Transactions of the Chinese Society Agricultural Machinery, 2014, 45(2): 109-114. (in Chinese with English abstract)
[30] 雷小龙. 油麦兼用型气送式集排器设计及其工作机理[D]. 武汉:华中农业大学,2017. Lei Xiaolong. Design and Working Mechanism of Air-Assisted Centralized Metering Device for Rapeseed and Wheat[D]. Wuhan: Huazhong Agricultural University, 2017 (in Chinese with English abstract)
[31] 中华人民共和国农业农村部. NY/T 2709-2015:油菜播种机作业质量[S]. 北京:中国标准出版社,2016.
Design and experiment of rapeseed aerial seeding device used for UAV
Zhang Qingsong, Zhang Kai, Liao Qingxi, Liao Yitao, Wang Lei, Shu Caixia
(1.,,430070,; 2.,,430070,)
Considering the rapeseed planting area is large in hilly and montanic area and the planting period for rice and rapeseed is partly overlapped in flat area in China, a rapeseed aerial seeding device used for UAV was designed in this paper. The rapeseed aerial seeding device included two parts: seeding device and control system. The working power come from UAV. Structure parameters of seed box volume, seed-filling funnel and geneva wheel of aerial seeding device were confirmed. The volume of seed box was 5.2 L so that it provided enough rapeseed for UAV to seeding 0.67 hm2area at one operation. The upper inlet shape of seed-filling funnel was a rectangle with length 30 mm and width 18 mm. The down outlet shape of seed-filling funnel was a circle with diameter 15 mm. The length of seed-filling funnel was 49-65 mm. The diameter of geneva wheel seed metering device was 80 mm with 30 type holes per circle in circumferential direction. Aerial seeding control system contained hand tele-control system and airborne tele-control system. The airborne tele-control system contained main controller (STM32 single chip), BeiDou Navigation chip, piezoelectric sensor, stepping motor with driver, flying information detection module, wireless transmission module and power module. The hand tele-control system contained controller, display screen, wireless transmission module, power module and keys. When the UAV was in the working field, the location information of UVA was detected by flying information detection module and the aerial seeding device started to seeding. The aerial seeding device stopped to seed when the flying information detection module detected that the UAV was out the working field. Hand tele-control system communicated with the airborne tele-control system acquired the flying information and then controlled the seeding rate of metering device when the UAV was flying. In order to analyze the factors affecting the working performance of aerial seeding device, the simulation model of airflow field of UAV rotor wing was established and the effects of rotor wing to airflow field was analyzed. The simulation results showed that the airflow field conducted by rotor wing affected the rapeseed falling track obviously. With the flight height of UVA increased, the range of space airflow field affected by UVA wings increased, and the distribution area of rapeseed landing on the ground increased. The relationship model between the UAV flight speed and geneva wheel rotary speed was established by selecting the length of seed-filling funnel and geneva wheel rotary speed as the factors based on the bench est. The results showed that when the distance between outlets of seed guiding tube and rotor wing was 300 mm, the length of seed-filling funnel was 53 mm, geneva wheel rotary speed was 10-50 r/min, the geneva wheel seeding rate met the requirements at the UAV flight speed of 2-4 m/s. The pavement test was conducted and the results showed that the effective working width was 2.15-2.45 m, coefficient of variation of seed distribution uniform was 32.05%-34.78% at the cross distance of seed tube outlets of 1.1 m, UAV flight height of 2-2.5 m. The average seedling density of field experiment was 64.5 plants/m2, the coefficient of variation of seed distribution uniformity was 38.23%, which meet the requirements of rape cultivation This study can provide a reference for the design of UAV aerial seeding device. In order to further optimize the working performance of UAV aerial seeding, it is necessary to conduct comprehensive tests under natural wind and different field conditions in the future research work.
UAV; experiments; aerial seeding; rape; metering device; control system
张青松,张恺,廖庆喜,等. 油菜无人机飞播装置设计与试验[J]. 农业工程学报,2020,36(14):138-147.doi:10.11975/j.issn.1002-6819.2020.14.017 http://www.tcsae.org
Zhang Qingsong, Zhang Kai, Liao Qingxi, et al. Design and experiment of rapeseed aerial seeding device used for UAV[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(14): 138-147. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.14.017 http://www.tcsae.org
2020-02-10
2020-06-20
国家自然科学基金项目(51875229、51975238);国家油菜产业体系专项资助项目(CARS-12);湖北省自然科学基金(2019CFB153);湖北省农业科技创新行动
张青松,博士,讲师,主要从事油菜机械化生产技术与装备研究。Email:qszhang@mail.hzau.edu.cn
10.11975/j.issn.1002-6819.2020.14.017
S251
A
1002-6819(2020)-14-0138-10
