双激光雷达温室运输机器人导航系统研制
2020-09-21侯加林蒲文洋李天华丁小明
侯加林,蒲文洋,李天华,丁小明
双激光雷达温室运输机器人导航系统研制
侯加林1,2,蒲文洋1,李天华1,2,丁小明3
(1. 山东农业大学机械与电子工程学院,泰安 271018;2. 山东省农业装备智能化工程实验室,泰安 271018;3. 农业农村部规划设计研究院设施农业研究所,北京 100125)
为解决机器人在温室环境下的自主导航问题,该研究研制了基于双激光雷达的温室运输机器人导航系统,实现温室环境下的地图构建、路径规划和定位导航。融合激光雷达与编码器信息,使用cartographer算法及时定位与地图构建。根据地图与检测点信息,采用Dijkstra算法规划全局路径,使用动态窗口算法规划局部路径,完成自主导航。试验表明,车载系统分别以0.2、0.5和0.8 m/s速度运行时,实际导航路径与目标路径的横向平均偏差小于13 cm,标准差小于5 cm;导航目标点处横向偏差、纵向偏差的平均值不超过9 cm,均方根误差不超过11.2 cm,标准差小于5 cm,航向偏差的平均值小于10°,均方根误差小于12°,标准差小于6°,满足机器人温室运输作业的导航精度需求。
温室;机器人;导航;双激光雷达
0 引 言
近年来,在园艺生产信息化、智能化加速升级的大背景下,中国温室面积快速持续增加[1-4]。受装备制造业整体水平低等因素制约,中国设施园艺装备在作业效率、成套性、稳定性和智能化方面与荷兰、美国、日本等发达国家存在较大差距,尤其缺乏基于自主导航控制的温室自主作业基础平台[5-8]。因此本文以温室为应用对象,以温室内精确定位、温室作业平台路径规划为重点研究内容,开发温室机器人导航系统,为温室内输送、巡检、植保、收获等作业提供基础平台。通过该平台,可提高温室综合作业效率,降低劳动强度,提升温室管控精细化水平。
目前应用于温室的机器人自主导航方案可分为4类:导轨式、垄沟式、循迹式和多源数据融合式[9-12]。导轨式自主导航因其可靠性高、稳定性好等特点,应用广泛[13-15],但在温室中铺设轨道,大大增加了温室建造成本,且在一定程度上限制了机器人的活动自由性。垄沟式自主导航通过机器人自身机械结构设计完成自主导航[16],运行稳定,但对温室环境尤其是地面具有很强的依赖性,且对地面具有一定的破坏性,应用范围较小。循迹式自主导航利用磁带或电缆作为识别标志,引导温室机器人沿着正确的路线行进,实现自主导航[17],但限制了机器人的灵活性。多源数据融合式融合处理多种传感器信息实现自主导航[18-24],常用的传感器包括激光雷达、相机、陀螺仪、编码器等。在4类导航方案中,导轨式、垄沟式自主导航要求道路具有特定的轨道或沟型,循迹式自主导航则要求道路上设有引导带,因此以上3类方法均存在成本高、灵活性差的问题。相比之下,多源数据融合式自主导航具有突出的环境适应性强、灵活性好的特点,发展前景广阔。
国内外许多学者基于多种传感器对机器人导航系统进行了研究。李天华等[25]通过搭建摄像头云平台,利用机器视觉提取道路尽头横向中心点像素坐标获得导航信息,开发了基于定向摄像头的运输车视觉导航系统,该系统虽然导航精度较高,实时性较好,但基于机器视觉的导航方式对光线具有很强的依赖性,难以做到全天候稳定运行。季宇寒等[26]基于激光雷达设计了巡检机器人导航系统,可实现机器人在室内环境下的精准定位、路径规划和自主导航,导航精度可满足机器人在各类巡检任务中的导航定位需求。Bechar 等[27]研制的田间作业机器人,采用履带式底盘,上方加装高清摄像机、高精度GPS,通过配备精确的卫星导航定位,可在复杂农田环境中行驶,但基于GPS的定位方式通常用于室外导航,室内环境下由于遮挡物较多,卫星信号易丢失。Conesa-munoz等[28]提出一种无人机检测与地面机器人执行相结合的复合农药变量喷洒系统,融合了RTK-GPS、机器视觉、激光雷达等多种传感器,但成本较高,难以推广使用。激光雷达(Light Detection and Ranging,LIDAR)作为导航定位的新型传感器,以其高精度、高实时性、全天候等优点逐渐成为机器人导航的主流设备。本文旨在研制基于前后双激光雷达的温室运输机器人导航系统,融合激光雷达与编码器信息,建立环境地图,规划最优路径,实现温室运输机器人的定位导航。
1 系统组成与设计
1.1 系统组成
温室运输机器人导航系统由远程监控平台和车载系统2部分组成。其中远程监控平台负责设置车载系统工作模式、发布目标点指令和实时显示车载系统位置信息。车载系统作为指令的具体执行者,负责接收监控平台发出的任务指令并执行。二者通过无线网络实时通信,共同完成温室运输机器人自主导航任务,系统组成如图1所示。车载系统长726 mm,宽617 mm,高1 073 mm,最大负载50 kg,最大行驶速度为1.2 m/s,垂直越障高度8 cm。
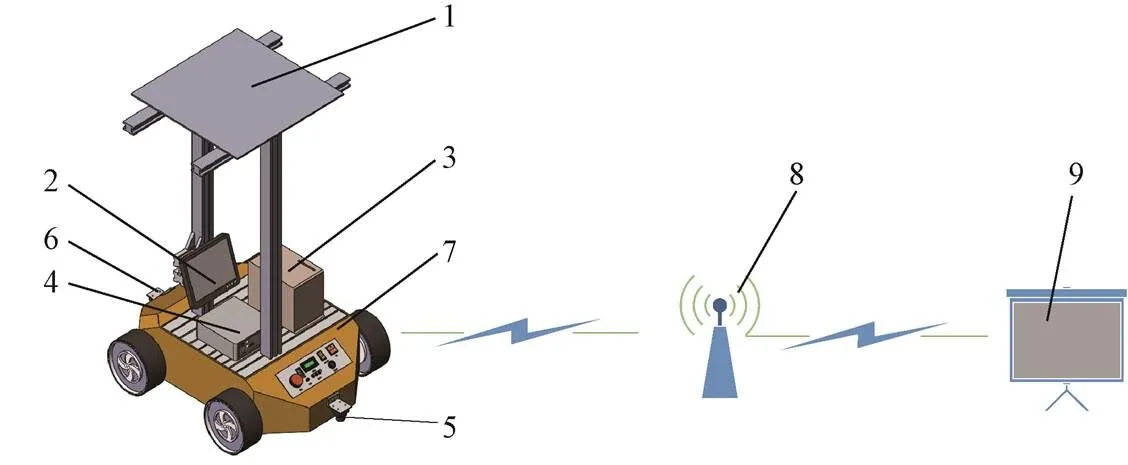
1.载物台 2.液晶屏 3.电池 4.工控机 5.后激光雷达 6.前激光雷达 7.车底盘 8.WIFI模块 9.远程监控平台
1.2 车载系统硬件设计
车载系统主要包括车底盘、驱动模块、控制模块,环境信息感知模块、通信模块和电源模块,硬件结构如图2所示。
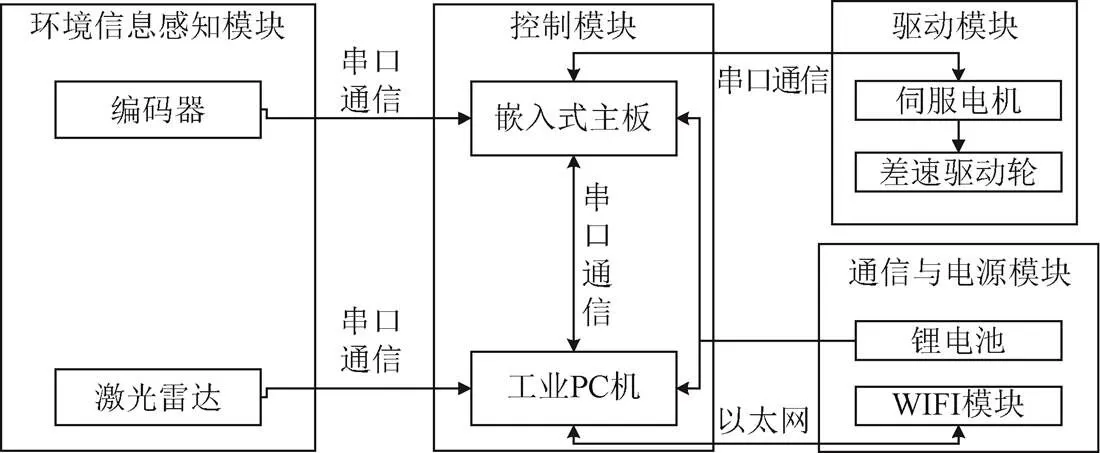
图2 车载系统硬件结构图
环境信息感知模块:在车底盘头部和尾部分别搭载一个FS-D10二维激光雷达,FS-D10二维激光雷达具有360°水平扫描范围,0.36°水平分辨率,10 m测距量程和15 Hz的扫描频率,可快速高效获取环境信息。为保证激光雷达顺利运行的同时尽可能地检测到温室内所有障碍物,以试验温室中最低障碍物草莓育苗盆(高度12 cm)为标准,激光雷达的安装高度设计为距地面10 cm。如图 3所示,以前激光雷达为例,激光雷达通过360°旋转发射激光点,不断扫描水平面环境信息,当激光发射点旋转到车底盘遮挡区域时,由于激光扫描点只能到达车底盘前部,从而无法获取温室环境信息。因此为了增大环境扫描范围,在车底盘尾部安装激光雷达,采用前后双激光雷达,可检测到车体前后所有障碍物,同时增大了扫描范围,可提高车载系统的实时避障能力。

1.车底盘遮挡区域 2.前激光雷达 3.车载系统 4.草莓架
控制模块:车载系统搭载工业PC机作为顶层控制器,CPU型号为AMD Ryzen 3 2200G/4G/120G。安装Ubuntu18.04操作系统,根据机器人操作系统ROS(Robot Operating System)架构运行机制和车载系统的硬件组成,制定ROS与STM32F103的串口通讯协议,运行导航算法实现自主导航。搭载STM32F103嵌入式主板作为底层控制器,根据编码器提供的速度信息,通过运动学解算获得车载系统的里程计数据(运动速度、行驶距离和转角),运行PID算法,实现车载系统的驱动控制。
驱动模块:车载系统采用4轮驱动式,可垂直越障8 cm,爬坡角度可达30°,越野能力强,转向灵活,控制方便,能实现车载系统的完整运动控制。为保证对运行速度的精确控制,在驱动电机上安装RLS公司生产的RMF44旋转编码器,分辨率为13位,最高转速为60 000 rpm,以获取车载系统的实时速度信息,车载系统实时速度作为反馈信息通过PID算法提高车载系统速度控制精度。
通信模块:工控机上装有GA-AB350N-Gaming WiFi主板,使得远程监控平台可以通过无线网络向车载系统发布目标点指令,同时车载系统也通过无线网络向远程监控平台反馈实时位置信息与工作状态。工控机通过串口通信的方式向车载系统底层驱动板发送速度指令,底层驱动板通过串口通信的方式反馈车载系统的实时速度信息。
电源模块:车载系统选用分线板船型锂电池,供电电压24 V,供电电流10 A,内置稳压模块及电量显示模块,电源续航时间为4 h。为延长电源续航时间,在车载系统上安装太阳能发电系统。太阳能发电板长633 mm,宽352 mm,辐照度1 000 W/m2时最大发电功率80 W,在阳光充足时可持续给电源充电,在阳光不充足时蓄电池可延长电源续航时间至8 h,以满足车载系统基本工作时间要求。
1.3 导航系统软件设计
温室运输机器人导航系统软件由用户交互层、信息处理层和执行层3个层次构成,系统结构如图4所示。
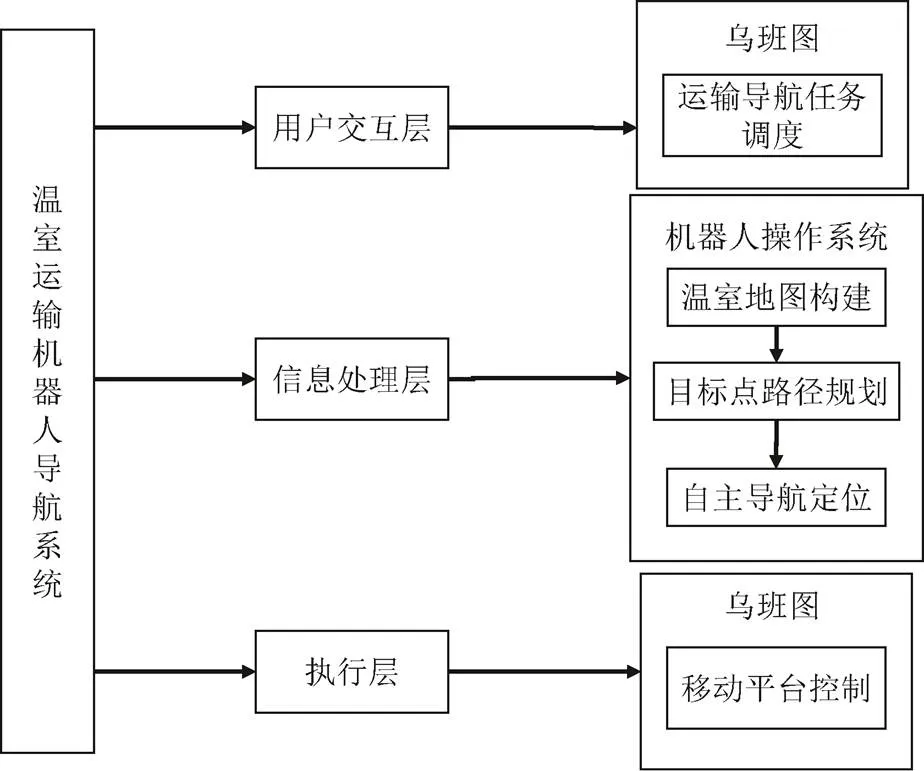
图4 温室运输机器人导航系统软件结构
用户交互层为基于Ubuntu的导航任务调度程序,可根据不同的应用场景,调整车载系统的工作模式并发布目标点指令,目前开发了2种工作模式,一是顺序导航,车载系统按照用户设定的行走路径逐一经过温室中固定的目标点;二是任意点导航,车载系统根据用户指令到达温室内任意目标点。信息处理层为基于ROS的即时定位与地图构建以及定点导航程序,该层主要负责收集车载系统运动信息及来自激光雷达的环境信息,并进行信息融合,根据控制指令和车载系统位姿进行地图构建、路径规划及自主导航。执行层为基于Ubuntu开源实时操作系统的移动平台控制程序,通过采集编码器的速度信息,采用经典的PID算法调节后输出期望的脉冲宽度调制PWM(Pulse Width Modulation)波控制电机转速,实现车载系统平稳、安全移动。
2 导航功能实现原理
导航技术是温室运输机器人的核心技术之一,主要经过实时定位、地图构建和路径规划3个步骤实现自主导航。本系统借助谷歌公司的cartographer开源算法包实现导航,节省了软件开发成本。前后激光雷达获取环境信息生成点云数据,形成子地图,通过点云匹配获得车载系统与子地图之间的相对位姿信息,点云数据更新后通过回环检测计算最新点云数据在已构建地图中的位置,更新二维栅格地图。地图数据与车载系统里程计数据融合计算出车载系统当前位姿(车载系统在全局坐标系下的位置坐标和转角),以当前位姿为基础对下一目标点进行路径规划,最终实现自主导航。具体流程如图5所示。
2.1 温室环境地图构建
Cartographer算法通过回环检测消除构图过程中产生的累积误差,其重点是融合多传感器数据的局部地图创建以及用于闭环检测的匹配策略的实现。一定数量的激光扫描数据点构成子地图,建立好的子地图形成一个回环,用于回环检测。当最新扫描数据点更新后,提取数据点的位姿信息,通过回环检测匹配已有回环中各扫描点的位姿信息,找到最佳匹配回环,通过扫描匹配将最新数据点插入到该回环中,完成新地图构建,具体流程如图6所示。
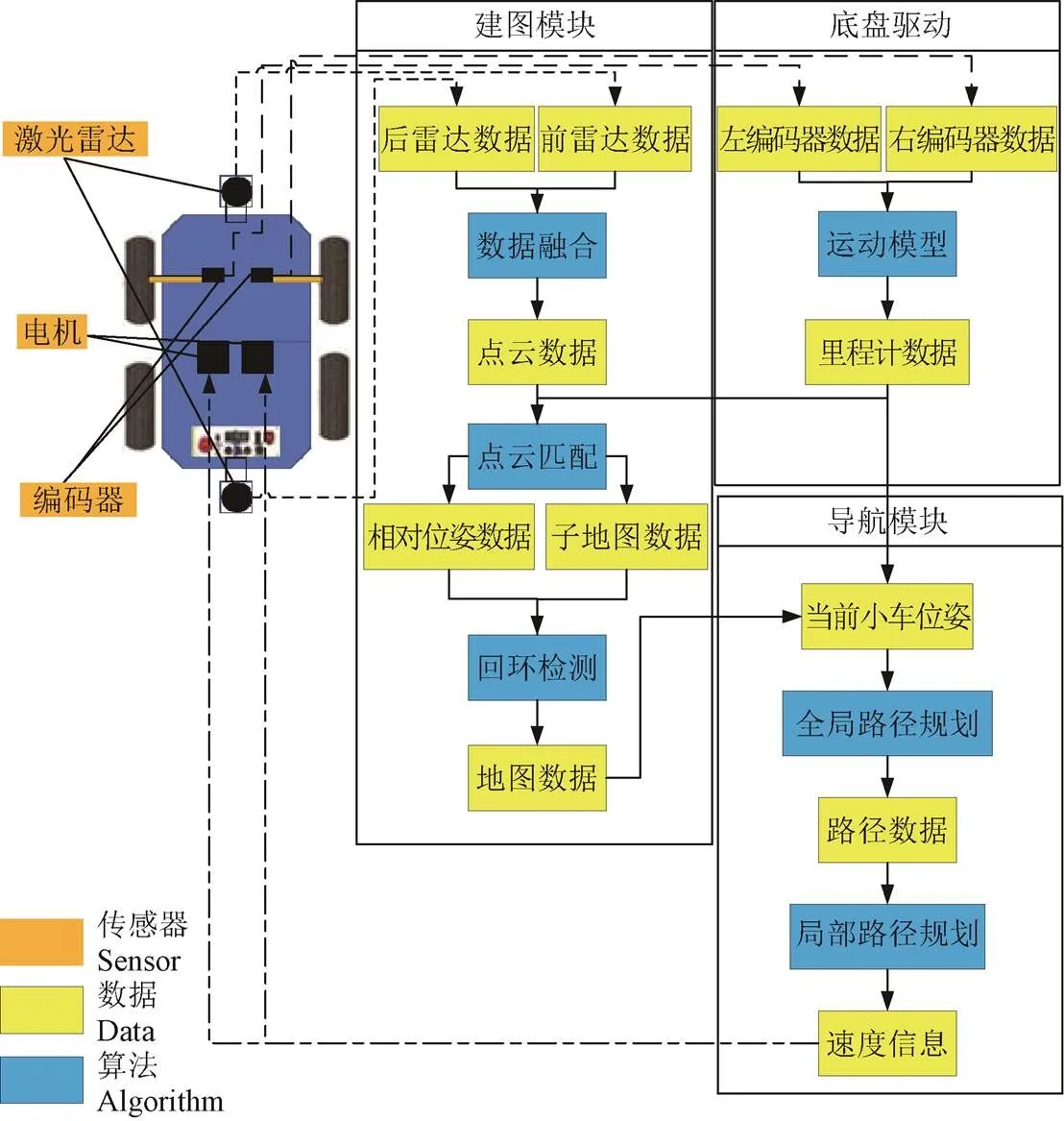
图5 导航功能实现流程
Fig 5 Implementation process of navigation function
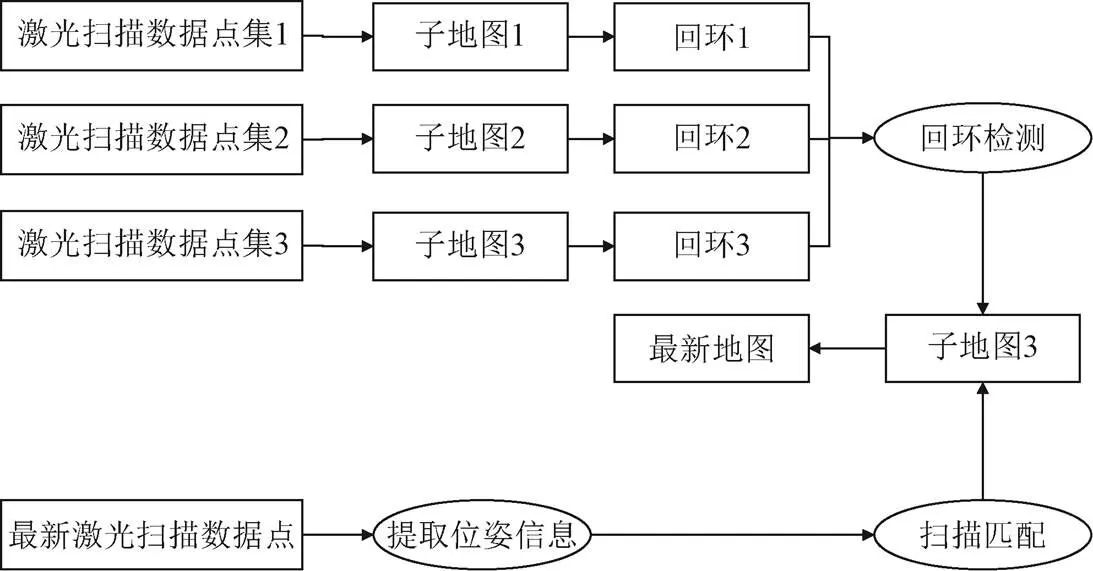
图6 环境地图构建流程
Cartographer通过子地图构建、扫描匹配和回环检测3个过程构建二维栅格地图,具体实现过程见文献[29]。其中,回环检测包括子地图位姿优化和扫描匹配。匹配过程如式(1)所示:
式中是激光扫描数据点,每个扫描数据点即一个位姿信息,包含激光雷达旋转角信息ξ(rad)及扫描数据点与激光雷达的相对位置信息,相对位置信息包括扫描点相对于激光雷达在轴的位置ξ(m)以及扫描点相对于激光雷达在轴的位置信息ξ(m);是最优匹配扫描数据点,是搜索空间内扫描数据点的数量;M是距离新的扫描数据点最近的栅格点对应的栅格值,无量纲,Th表示激光雷达扫描数据点在子地图坐标系下的位姿,是实际环境中的搜索空间,计算方法如式(2)~(8)所示:



本文采用前后双激光雷达扫描环境信息,由于增大了环境信息扫描范围,一方面使搜索面积增大,另一方面由于激光扫描点集max增大,δ减小,从而增大了搜索角度ω。在采用分支界定算法求解时,可扩大顶层线性搜索空间,增大了计算量但保障了所求解的最优性。
2.2 路径规划
采用Dijkstra实现车载系统全局路径规划,具体实现过程可参考文献[30],采用动态窗口算法实现车载系统的局部路径规划,实现过程分为以下3步(具体实现过程参考文献[31]):
1)建立车载系统运动学模型;
2)基于车载系统最大最小速度的设定、电机性能限制(主要是最大加速度)以及能否及时避障等约束,形成速度区间,对速度进行采样;
3)利用评价函数选择最优路径。
3 温室运输机器人运行性能测试试验
3.1 单双激光雷达建图效率对比试验
试验地点为农业农村部规划设计研究院设施农业研究所永清科研基地venlo型温室的草莓种植区。试验区长34 m,宽15 m。车载系统分别搭载前后激光雷达(方式1)、后激光雷达(方式2)及前激光雷达(方式3)以0.5 m/s的速度从相同起点按照图7所示路线行驶并构建环境地图。具体试验过程如下:
1)车载系统采用方式1按路线行驶并实时建图,到达终点后标记车载系统所在位置;
2)车载系统采用方式2按照步骤1)路线行驶,运动到步骤1)标记点处时停止,观察并记录建图效果;
3)车载系统采用方式3按照步骤1)路线行驶,运动到步骤1)标记点处时停止,观察并记录建图效果。
3种搭载方式下激光雷达初始扫描范围如图8a所示。
1.车载系统行驶路线 2.车载系统 3.加热管道 4.草莓架
3种激光雷达安装方式的实际建图效果如图8b所示,经计算,行驶距离相同时,采用方式1时建图面积最大,数值为56.5 m2,采用方式2建图面积为46.5 m2,采用方式3时建图面积为50 m2。
为保证建图面积相同,对步骤2)及步骤3)作以下调整:
2)采用方式2按照步骤1)路线行驶,运动到步骤1)标记点处旋转360°后停止,记录行驶时间;
3)采用方式3旋转360°后按照步骤1)路线行驶,运动到步骤1)标记点处停止,记录行驶时间。
试验结果如表1所示。
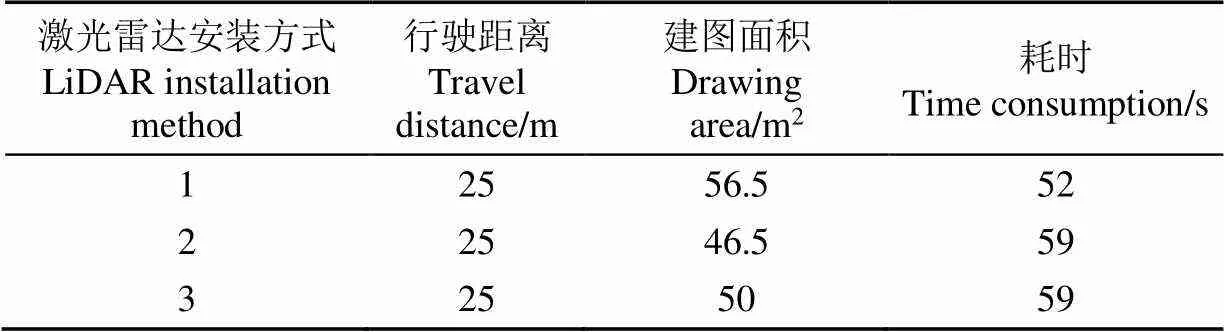
表1 不同激光雷达安装方式的建图效果对比
试验表明,车载系统搭载前后双激光雷达与搭载单激光雷达相比,可增大扫描范围,减少扫描盲区,在行驶距离相同的条件下可构建更大面积的地图,构建地图面积相同的条件下耗时更少,建图效率提高。
3.2 实时避障能力测试试验
车载系统分别搭载前后双激光雷达、前激光雷达及后激光雷达以0.5 m/s的速度自主导航,导航过程中随机选择5个位置在车载系统前后实时设置5组障碍物,障碍物为草莓育苗盆,障碍物与激光雷达间距分别设置为15、20、25、30和35 cm。
以位置1为例,具体试验过程如下:试验开始前在位置1处粘贴黑色胶带作为2号标记位,胶带宽度1.8 cm。将车载系统前激光雷达上边沿与2号标记位后边沿在轴方向调整于同一平面,以2号标记位前边沿为基准线沿轴正方向测量15 cm用黑色标记笔标记作为1号标记位,标记后激光雷达下边沿在地面的投影作为3号标记位,以3号标记位为基准线沿轴负方向测量15 cm标记为4号标记位,标记位设置如图9所示。TCRT5000红外传感器安装在车底盘,当红外传感器检测到黑色胶带时向STM32F103控制器输出高电平信号,控制器收到此信号后触发蜂鸣器报警,当红外传感器未检测到黑色胶带时输出低电平,蜂鸣器不触发。试验过程中听到由2号标记位触发的蜂鸣器警报后,立刻在1号标记位与4号标记位处同时放置障碍物,观察车载系统的避障情况。试验结果如表2所示。
试验结果表明:车载系统搭载前后双激光雷达时,当地图中出现障碍物时可实现实时完全避障,仅搭载前激光雷达与仅搭载后激光雷达时均存在无法避障的情况。原因如下:以仅搭载前激光雷达为例,当规划路径上突然出现障碍物时,激光雷达检测到障碍物后重新规划路径,当车辆与障碍物距离过小时无法直接通过转向避开障碍物,为确保安全,车载系统需后退一定距离,若此时后方存在障碍物,由于存在扫描盲区,车载系统就会与障碍物发生碰撞。
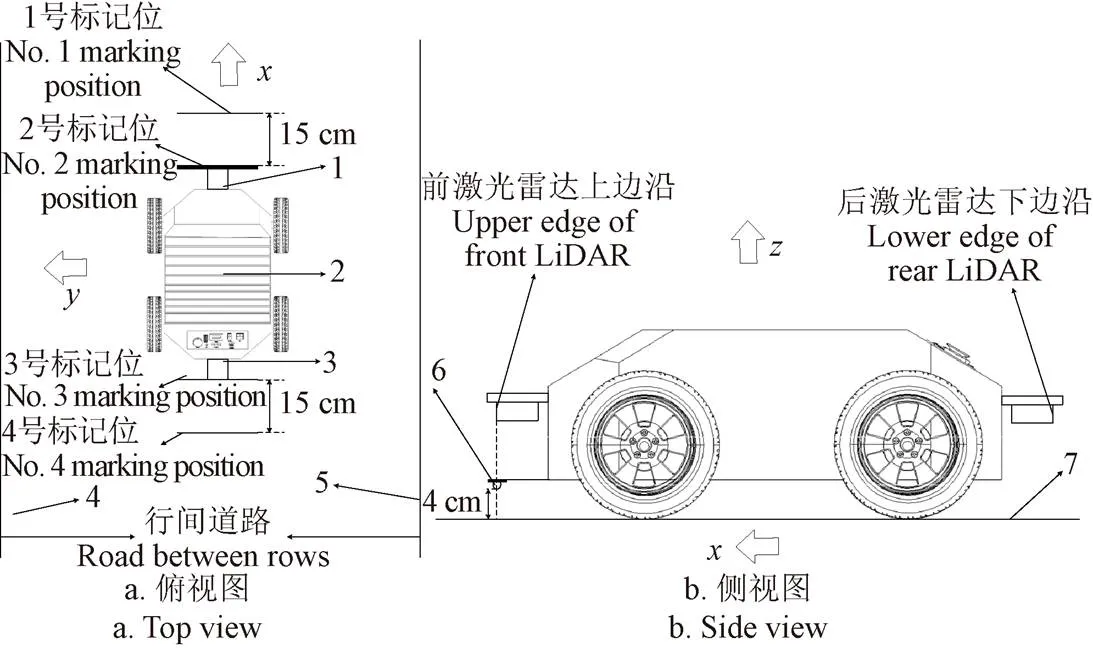
1.前激光雷达 2.车底盘 3.后激光雷达 4.温室墙体 5.草莓架 6.红外传感器 7.地面

表2 车载系统不同激光雷达安装方式下的实时避障试验结果
注:1表示车底盘与障碍物发生碰撞,0表示车底盘与障碍物未发生碰撞;表示车底盘头部与障碍物是否发生碰撞,=0,1;表示车底盘尾部与障碍物是否发生碰撞,=0,1。
Note: 1 means the vehicle chassis collides with the obstacle, 0 means the vehicle chassis does not collide with the obstacle;indicates whether the head of the vehicle chassis collides with the obstacle,=0, 1;indicates whether the rear of the vehicle chassis collides with the obstacle,=0, 1.
3.3 导航精度测试试验
在温室道路上铺设白色地布,在车载系统基坐标的垂线与车载系统底盘的交点位置安装黑色记号笔,车载系统导航过程中黑色记号笔会标记出实际运动轨迹。ROS中使用的是右手坐标系,以基坐标为原点建立坐标系,车头朝向方向为轴正方向,正左方向为轴正方向,垂直于、水平面且经过基坐标的上方向为轴正方向。车载系统基坐标及坐标系、地面测量点及标记笔安装位置如图10所示。
3.3.1 目标点导航精度测试试验
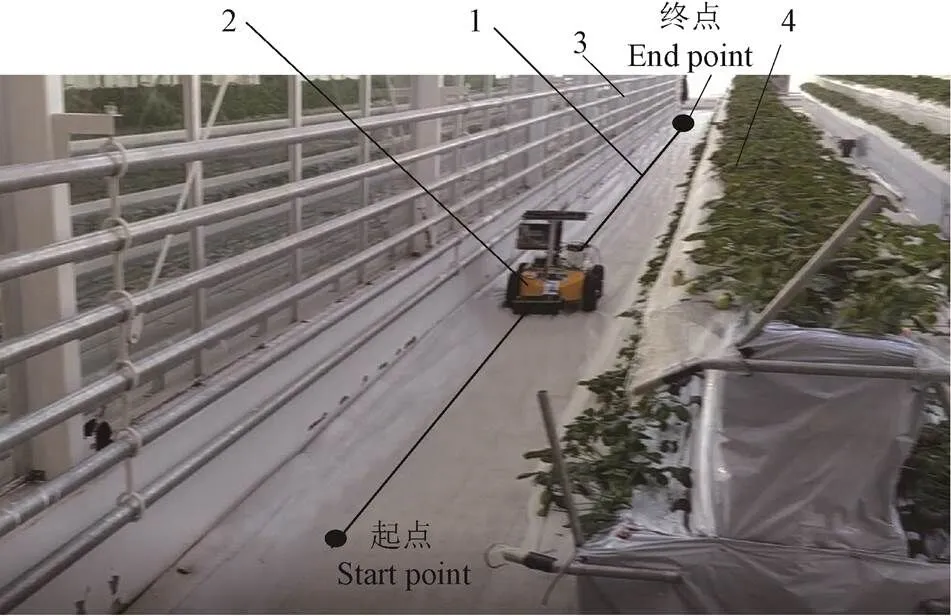
参考文献[13]和文献[26]方法设计试验,试验步骤为:设置行间道路的中心线为车载系统的目标导航路径,车载系统从起始点分别以0.2、0.5和0.8 m/s的速度按照图 11所示路径依次经过各目标点后到达终点,完成自主导航。设定车载系统每到达一个目标点的停留时间为20 s,每到达一个目标点记录车载系统四轮及基坐标位置以测量车载系统在目标点处的横向偏差、纵向偏差及航向偏差。各速度下试验重复3次,各目标点处3次试验的各指标结果分别取平均值作为车载系统该速度下在该目标点处的导航偏差,现场试验如图12所示,导航偏差测量结果如表3所示。
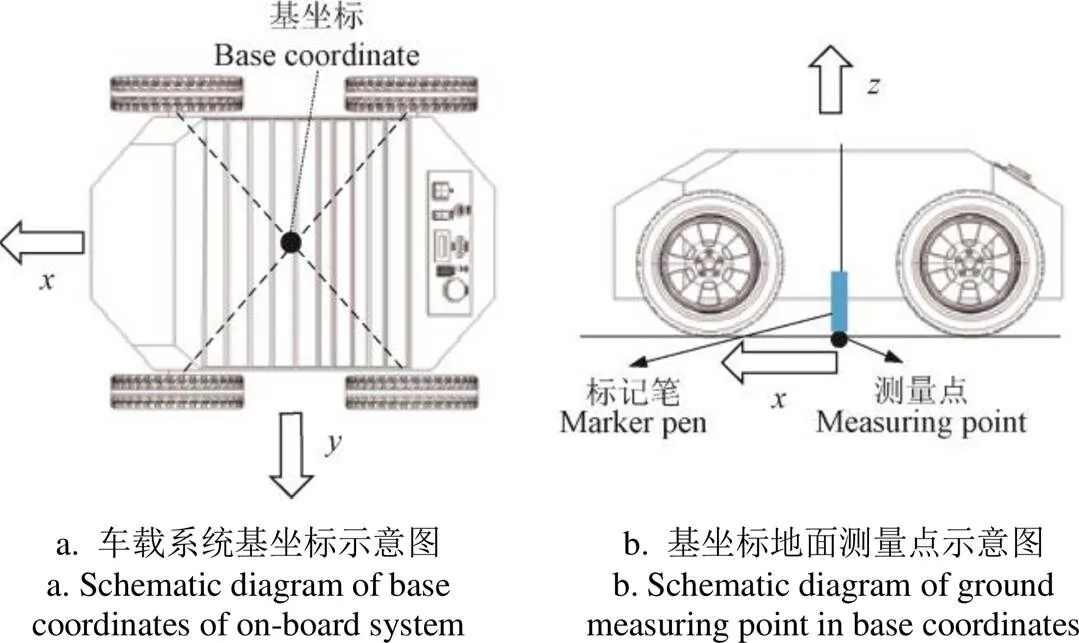
图10 车载系统基坐标及其测量点示意图
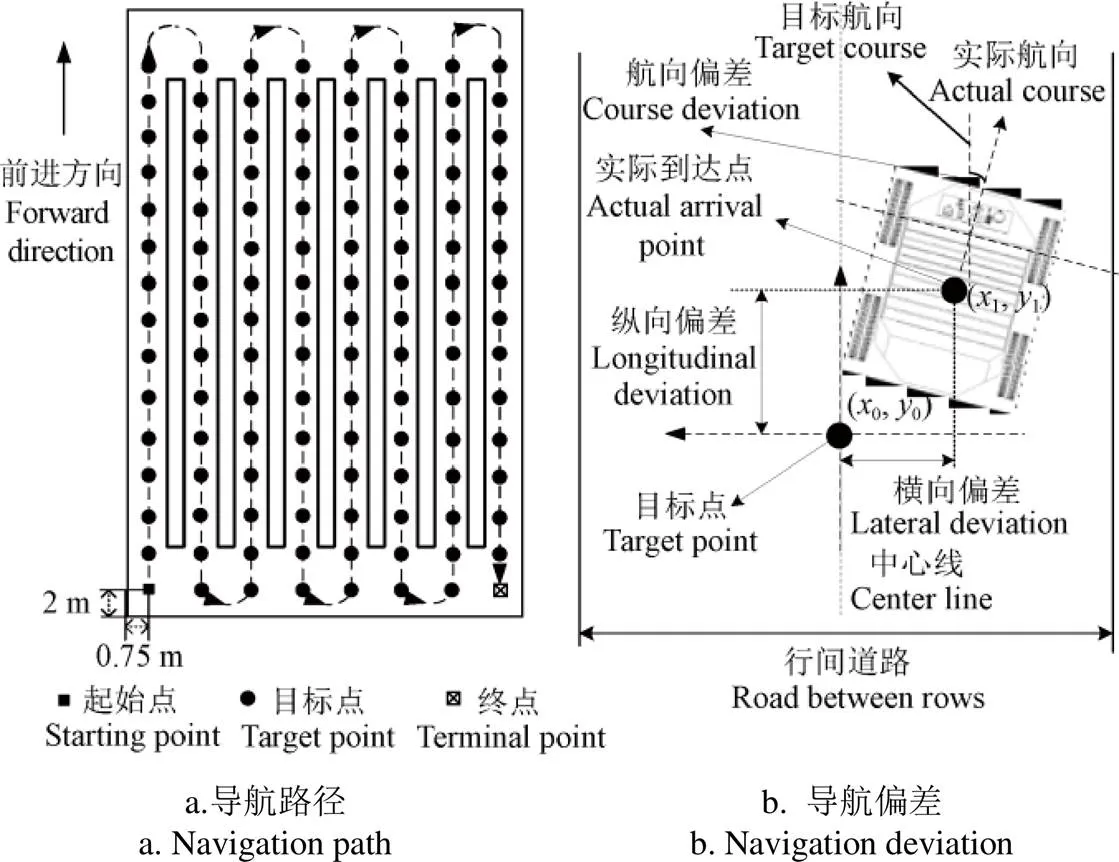
图11 车载系统导航路径设定及导航偏差示意图
如图11所示,各目标点处导航偏差的测量方法为:以目标点(0,0)为坐标原点,以设定运动轨迹前进方向为轴正方向,建立右手直角坐标系。航向偏差是车载系统实际航向与目标航向之间的夹角,设实际到达点坐标为(1,1),则横向偏差数值为
1=|1-0| (9)
式中1为横向偏差,cm。
纵向偏差数值为
2=|1-0| (10)
式中2为纵向偏差,cm。
导航偏差正负值的定义为:若实际到达点在目标点的左侧,则横向偏差为正;若实际到达点在目标点的右侧,则横向偏差为负;实际到达点在目标点的上侧,则纵向偏差为正,实际到达点在目标点的下侧,则纵向偏差为负;若实际航向在目标航向的左侧,则航向偏差为正,若实际航向在目标航向的右侧,则航向偏差为负。
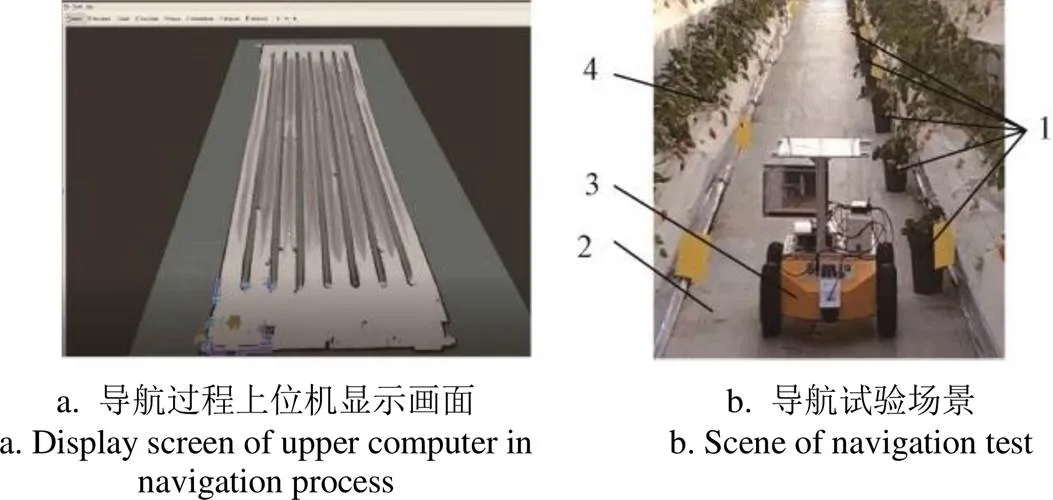
1.目标点标记物 2.地布 3.车载系统 4.草莓架
表3表明,随着速度增加,车载系统的横向偏差、纵向偏差及航向偏差的最大值、平均值及均方根误差均增大。但3种速度下各目标点处的横向偏差、纵向偏差的平均值不超过9 cm,均方根误差均不超过11.2 cm,标准差小于5 cm;航向偏差的平均值小于10°,均方根误差小于12°,标准差小于6°。试验温室实际测试结果证明,该精度可满足机器人在试验温室运输任务中的导航定位需求。
3.3.2 全路径导航偏差测试试验
参考文献[32]方法设计试验,试验步骤为:车载系统分别以0.2、0.5和0.8 m/s的速度按照图11所示路径完成自主导航,一次导航完成后从起点开始以1 m为间隔,测量车载系统实际导航路径与目标路径之间的横向偏差。各速度下试验重复3次,以3次试验在测量点处的横向偏差平均值作为车载系统该速度下在测量点处的偏差,横向偏差统计如表4所示。
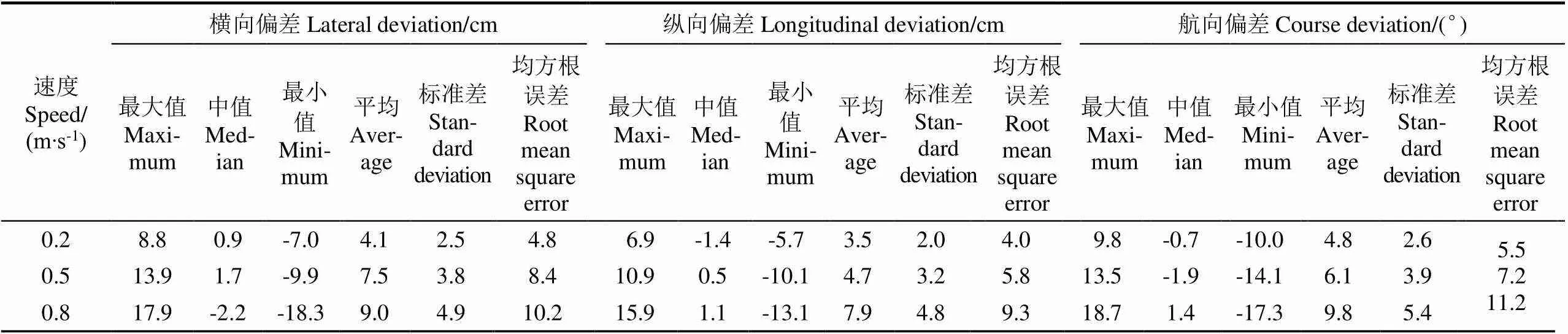
表3 导航偏差
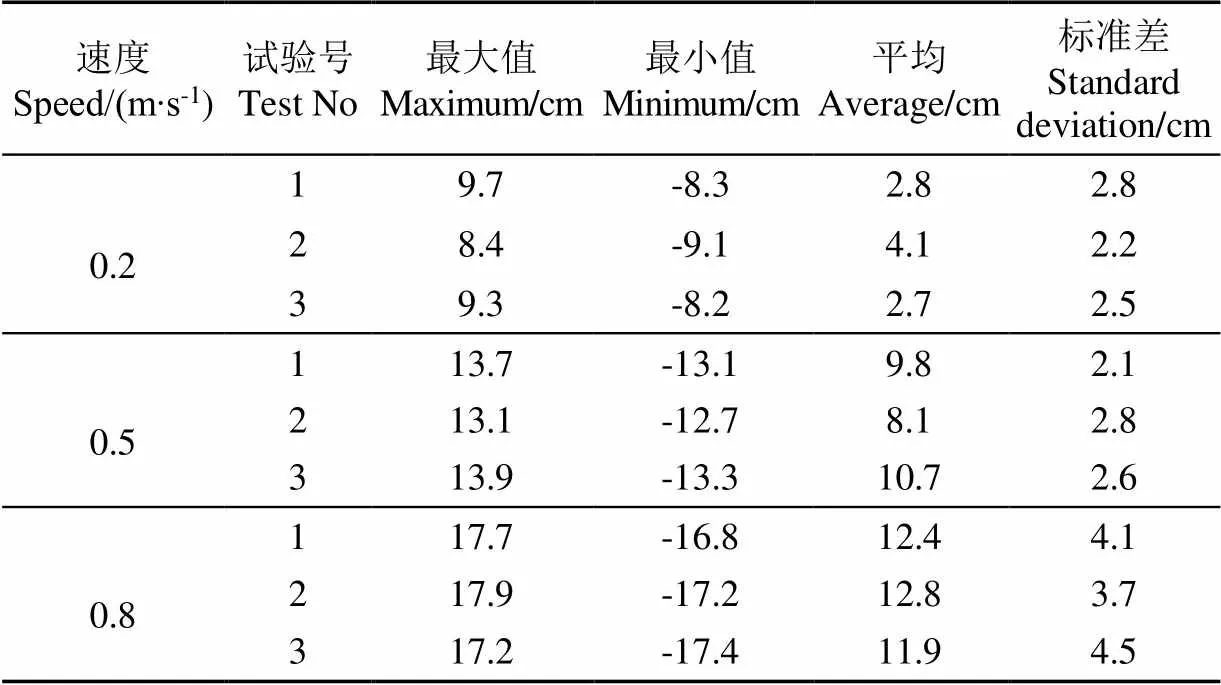
表4 横向偏差统计
由表4可知,车载系统以0.2 m/s的速度行驶,实际导航路径与目标路径之间的最大偏差小于10 cm,平均偏差小于5 cm;车载系统以0.5 m/s的速度行驶,实际导航路径与目标路径之间的最大偏差小于14 cm,平均偏差小于11 cm;车载系统以0.8 m/s的速度行驶,实际导航路径与目标路径之间的最大偏差小于18 cm,平均偏差小于13 cm。车载系统在3种速度下均可完成自主导航,安全到达终点,实际导航路线与目标路线之间虽有偏差但未发生严重偏离。
全路径导航偏差测试试验表明,车载系统分别以0.2、0.5和0.8 m/s的速度运行时均可完成自主导航到达终点。3种速度下车载系统实际导航路径与目标路径间的平均偏差小于13 cm,标准差小于5 cm。
4 结 论
1)研制了基于前后双激光雷达的温室运输机器人导航系统,与单激光雷达相比,增加了环境扫描范围,提高了建图效率及实时避障能力。该系统采用模块化的硬件结构设计和分层式软件结构设计,兼顾了运输机器人对数据通量与响应速度的要求。
2)导航试验结果表明,车载系统分别以0.2、0.5和0.8 m/s的速度运行时,实际导航路径与目标路径的平均偏差小于13 cm,标准差小于5 cm。导航目标点处的横向偏差、纵向偏差的平均值不超过9 cm,均方根误差均不超过11.2 cm,标准差小于5 cm;航向偏差的平均值小于10°,均方根误差小于12°,标准差小于6°。温室实际测试结果表明,该精度满足机器人在试验温室运输的导航定位需求。在下一步研究中,将通过算法优化、辅助定位等方式进一步减小导航偏差。
3)系统软件的核心控制层基于ROS操作系统实现,采用分布式节点实现信息交互,便于后续对软件算法的进一步完善开发,该系统对温室机器人导航系统的研发具有一定借鉴意义。
[1] 齐飞,李恺,李邵,等. 世界设施园艺智能化装备发展对中国的启示研究[J]. 农业工程学报,2019,35(2):183-195. Qi Fei, Li Kai, Li Shao, et al. Development of intelligent equipment for protected horticulture in world and enlightenment to China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(2): 183-195. (in Chinese with English abstract)
[2] 齐飞,魏晓明,张跃峰. 中国设施园艺装备技术发展现状与未来研究方向[J]. 农业工程学报,2017,33(24):1-9. Qi Fei, Wei Xiaoming, Zhang Yuefeng. Development status and future research emphase on greenhouse horticultural equipment and its relative technology in China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(24): 1-9.(in Chinese with English abstract)
[3] 郭世荣,孙锦,束胜,等. 国外设施园艺产业概况、特点及趋势分析[J]. 南京农业大学学报,2012,35(5):43-52. Guo Shirong, Sun Jin, Shu Sheng, et al. General situation’ charactics and trends of protected horticulture in foreigns[J]. Journal of Nanjing Agricultural University, 2012, 35(5): 43-52. (in Chinese with English abstract)
[4] 刘霓红,蒋先平,程俊峰,等. 国外有机设施园艺现状及对中国设施农业可持续发展的启示[J]. 农业工程学报,2018,34(15):1-9. Liu Nihong, Jiang Xianping, Cheng Junfeng, et al. Current situation of foreign organic greenhouse horticulture and its inspiration for sustainable development of Chinese protected agriculture[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(15): 1-9.(in Chinese with English abstract)
[5] 孙锦,高洪波,田婧,等. 我国设施园艺发展现状与趋势[J]. 南京农业大学学报,2019,42(4):594-604. Sun Jin, Gao Hongbo, Tian Jing, et al. Development status and trends of protected horticulture in China[J]. Journal of Nanjing Agricultural University, 2019, 42(4): 594-604. (in Chinese with English abstract)
[6] 李中华,孙少磊,丁小明,等. 我国设施园艺机械化水平现状与评价研究[J]. 新疆农业科学,2014,51(6):1143-1148. Li Zhonghua, Sun Shaolei, Ding Xiaoming, et al. Research on the present situation and evaluation of protected horticulture mechanization level in China[J]. Xinjiang Agricultural Sciences, 2014, 51(6): 1143-1148. (in Chinese with English abstract)
[7] 于亚波,伍萍辉,冯青春,等. 我国蔬菜育苗装备研究应用现状及发展对策[J]. 农机化研究,2017,36(6):1-6. Yu Yabo, Wu Pinghui, Feng Qingchun, et al. Situation and strategy of automatic seedling machine in China[J]. Journal of Agricultural Mechanization Research, 2017, 36(6): 1-6. (in Chinese with English abstract)
[8] Keyvan A V, Jafar M. A farmer-assistant robot for nitrogen fertilizing management of greenhouse crops[J]. Computers and Electronics in Agriculture, 2017, 139: 153-163.
[9] Pawin T, Tofael A, Tomohiro T. Navigation of autonomous tractor for orchards and plantations using a laser range finder: automatic control of trailer position with tractor[J]. Biosystems Engineering, 2016, 147: 90-103.
[10] Ohmorj H. Utilization of the electric vehicle in greenhouse horticulture[J]. Journal of the Japanese Society of Agricultural Machinery, 2010, 72: 527-530.
[11] Luciano C, Filippo B, Domenico L, et al. A small versatile electrical robot for autonomous spraying in agriculture[J]. AgriEngineering, 2019, 1(3): 391-402.
[12] 赵匀,武传宇,胡旭东,等. 农业机器人的研究进展及存在的问题[J]. 农业工程学报,2003,19(1):20-24. Zhao Yun, Wu Chuanyu, Hu Xudong, et al. Research progress and problems of agricultural robot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2003, 19(1): 20-24. (in Chinese with English abstract)
[13] Subramanian V, Thomas F B, Arroyo A A. Development of machine vision and laser radar based autonomous vehicle guidance systems for citrus grove navigation[J]. Computers and Electronics in Agriculture, 2006, 53: 130-143.
[14] 刘继展. 温室采摘机器人技术研究进展分析[J]. 农业机械学报,2017,48(12):1-18. Liu Jizhan. Research progress analysis of robotic harvesting technologies in greenhouse[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(12): 1-18.(in Chinese with English abstract)
[15] 居锦,刘继展,李男,等. 基于侧向光电圆弧阵列的温室路沿检测与导航方法[J]. 农业工程学报,2017,33(18):180-187. Ju Jin, Liu Jizhan, Li Nan, et al. Curb-following detection and navigation of greenhouse vehicle based on arc array of photoelectric switches[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(18): 180-187. (in Chinese with English abstract)
[16] Liesbet V H, Polina K, Lieve W, et al. Crop design for improved robotic harvesting: A case study of sweet pepper harvesting[J]. Biosystems Engineering, 2020, 192: 294-308.
[17] Kondo N, Monta M, Fujiura T. Fruit harvesting robot in Japan[J]. Advances in Space Research the Official Journal of the Committee on Space Research, 1996, 18(12): 181-184.
[18] Zhao Yuanshen, Gong Liang, Liu Chengliang, et al. Dual-arm robot design and testing for harvesting tomato in greenhouse[J]. IFAC-Papers On Line, 2016, 49(16): 161-165.
[19] 姜德晶,王树臣,曾勇,等. 基于图像分割映射的农业机器人视觉去雾方法[J]. 农业机械学报,2016,47(11):25-31. Jiang Dejing, Wang Shuchen, Zeng Yong, et al. Agricultural robot visual de-hazing method based on image segmentation map[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(11): 25-31. (in Chinese with English abstract)
[20] 张漫,季宇寒,李世超,等. 农业机械导航技术研究进展[J].农业机械学报,2020,51(4):1-18.Zhang Man, Ji Yuhan, Li Shichao, et al. Research progress of agricultural machinery navigation technology[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(4): 1-18. (in Chinese with English abstract)
[21] Mohd S A M, Mohamad S Z A, Zaharuddin M, et al. Multi-objective path planner for an agricultural mobile robot in a virtual greenhouse environment[J]. Computers and Electronics in Agriculture, 2019, 157: 488-499.
[22] Mehta S S, Burks T F, Dixon W E. Vision-based localization of a wheeled mobile robot for greenhouse applications: A daisy-chaining approach[J]. Computers and Electronics in Agriculture, 2008, 63(1): 28-37.
[23] 贾士伟,李军民,邱权,等. 基于激光测距仪的温室机器人道路边缘检测与路径导航[J]. 农业工程学报,2015,31(13):39-45. Jia Shiwei, Li Junmin, Qiu Quan, et al. New corridor edge detection and navigation for greenhouse mobile robots based on laser scanner[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(13): 39-45. (in Chinese with English abstract)
[24] 高国琴,李明. 基于K-means算法的温室移动机器人导航路径识别[J]. 农业工程学报,2014,30(7):25-33. Gao Guoqin, Li Ming. Navigating path recognition for greenhouse mobile robot based on K-means algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(7): 25-33. (in Chinese with English abstract)
[25] 李天华,吴增昊,廉宪坤,等. 基于定向摄像头的大拱棚运输车视觉导航研究[J]. 农业机械学报,2018,49(S1):8-13. Li Tianhua, Wu Zenghao, Lian Xiankun, et al. Navigation line detection for greenhouse carrier vehicle based on fixed direction camera[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(S1): 8-13. (in Chinese with English abstract)
[26] 季宇寒,李寒,张漫,等. 基于激光雷达的巡检机器人导航系统研究[J]. 农业机械学报,2018,49(2):14-21. Ji Yuhan, Li Han, Zhang Man, et al. Navigation system for inspection robot based on LiDAR[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(2): 14-21. (in Chinese with English abstract)
[27] Bechar A, Meyer J, Edan Y. An objective function to evaluate performance of human-robot systems for target recognition tasks[C]. IEEE International Conference on Systems, Man and Cybernetics, 2007: 967-972.
[28] Conesa-munoz J, Valente J, Cerro J D, et al. Integrating autonomous aerial scouting with autonomous ground actuation to reduce chemical pollution on crop soil[C]. Robot 2015: Second Iberian Robotics Conference, 2016: 41-53.
[29] Hess W, Kohler D, Rapp H, et al. Real-time loop closure in 2D LIDAR SLAM[C]// IEEE International Conference on Robotics and Automation (ICRA), 2016: 1271-1278.
[30] Zhou Minhang, Gao Nina. Research on optimal path based on Dijkstra algorithms[C]. Proceedings of 3rd International Conference on Mechatronics Engineering and Information Technology (ICMEIT), 2019: 900-908.
[31] Fox D, Burgard W, Thrun S. The dynamic window approach to collision avoidance[J]. IEEE Robotics & Automation Magazine, 2002, 4(1): 23-33.
[32] 刘沛,陈军,张明颖. 基于激光导航的果园拖拉机自动控制系统[J]. 农业工程学报,2011,27(3):196-199. Liu Pei, Chen Jun, Zhang Mingying. Automatic control system of orchard tractor based on laser navigation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(3): 196-199. (in Chinese with English abstract)
Development of dual-lidar navigation system for greenhouse transportation robot
Hou Jialin1,2, Pu Wenyang1, Li Tianhua1,2, Ding Xiaoming3
(1.,,271018,; 2.,271018,; 3.,100125,)
In order to solve the problem of autonomous navigation of robots in greenhouse environment, a navigation system for greenhouse transportation robot based on dual-lidar was developed in this paper, The navigation system consisted of front and rear lidar, compared with the single lidar, the front and rear double lidar could increase the scanning range, reduce the blind area of tracing, improve the efficiency and accuracy of surveying and mapping, and improve the real-time obstacle avoidance ability of the robot. The navigation system of greenhouse transportation robot was composed of a remote monitoring platform and an on-board system. The remote monitoring platform was responsible for selecting the working mode of the on-board system, issuing the the instruction of target points and displaying the location information of the on-board system. As the executor of the instructions, the on-board system was responsible for receiving and executing task instructions ordered by the monitoring platform. Through the real-time communication through wireless network, the remote monitoring platform and the on-board system jointly complete the autonomous navigation task of greenhouse transportation robot. The on-board system hardware mainly consisted of a driving module, a control module, an environmental information perception module, a communication module and a power supply module. The on-board systems software was divided into three layers, user interaction layer, information processing layer and execution layer. The user interaction layer was an open-source Ubuntu-based navigation task scheduler that responsible for adjusting the working mode of the on-board system and issuing target points instructions. The information processing layer was the real-time positioning and map building and fixed-point navigation program based on the Robot Operating System(ROS), which was responsible for collecting the motion information of on-board system and environmental information from lidar, and conducting information fusion. According to the control command and on-board system position and attitude information, map construction, path planning and autonomous navigation were carried out. The executive layer was the mobile platform control program based on the open source real-time operating system of Ubuntu. By collecting the speed information of the encoder, the classical PID algorithm was used to adjust and output the desired Pulse Width Modulation(PWM) wave to control the motor speed, so as to realize the stable and safe movement of the on-board system. The dynamic window algorithm was used to plan the local optimal path to reduce walking time and energy consumption. The test results showed that when the on-board system ran at the speed of 0.2, 0.5 and 0.8 m/s , the average deviation and the standard deviation between the actual navigation path and the target path was less than 13 and 5 cm, respectively; the average value, the root mean square error, the standard deviation of the lateral deviation and longitudinal deviation at each target point was not more than 9, 11.2 and 5 cm, respectively; the average value, the root mean square error, and the standard deviation of the course deviation was less than 10°, 12° and 6°, respectively, which met the navigation accuracy requirements of robot transportation in greenhouse.
greenhouse; robots; navigation; dual-lidar
侯加林,蒲文洋,李天华,等. 双激光雷达温室运输机器人导航系统研制[J]. 农业工程学报,2020,36(14):80-88.doi:10.11975/j.issn.1002-6819.2020.14.010 http://www.tcsae.org
Hou Jialin, Pu Wenyang, Li Tianhua, et al. Development of dual-lidar navigation system for greenhouse transportation robot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(14): 80-88. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.14.010 http://www.tcsae.org
2020-04-21
2020-06-26
十三五国家重点研发计划项目(2017YFD0701500);山东省重大科技创新工程项目(2019JZZY020620)
侯加林,教授,博士生导师,主要从事设施农业研究。Email:jlhou@sdau.edu.cn
10.11975/j.issn.1002-6819.2020.14.010
S147.2
A
1002-6819(2020)-14-0080-09
