基于LiDAR扫描的高地隙宽幅喷雾机变量施药系统研制
2020-09-21乔白羽何雄奎王志翀刘伟洪梁文鹏
乔白羽,何雄奎,王志翀,韩 冷,刘伟洪,董 祥,梁文鹏
基于LiDAR扫描的高地隙宽幅喷雾机变量施药系统研制
乔白羽1,何雄奎1※,王志翀1,韩 冷1,刘伟洪1,董 祥2,梁文鹏3
(1. 中国农业大学理学院,北京 100193;2. 中国农业机械化科学研究院,北京 100083;3. 广西农业机械研究院有限公司,南宁 530007)
为提高甘蔗等高茎秆作物的机械化病虫害防治水平,解决普通喷雾机进地困难、农药用量大且利用率低等问题,该研究研制了一套基于三维LiDAR实时扫描的高地隙宽幅喷雾机变量施药系统。该系统搭载的喷雾机作业幅宽24 m、地隙1.35 m,喷杆喷雾高度在0.5~2.5 m可调。变量施药系统采用16线激光雷达传感器,对作物的三维信息实时探测,安装于机具后端的脉宽调制(PWM,Pulse-Width Modulation)控制器从CAN总线上获取喷雾机的速度信息并传递给计算机,采用Python控制程序,融合激光雷达数据与实时速度信息绘制喷雾量处方图并发送给PWM控制器。建立了作物冠层高度与施药量之间的数学模型,根据作物冠层所需要的喷雾量,由控制器控制电磁阀的开闭实现精准变量施药。系统组装完成后,在甘蔗地进行田间试验测试。结果显示:激光雷达能够准确识别甘蔗株高,最大识别误差为8.42%,最小识别误差为0.17%,平均误差为4.59%,激光雷达将识别到的株高信息准确传递给变量施药系统。变量系统开启后,喷雾机会根据株高变化实时改变喷雾量,雾滴沉积密度满足相关标准要求。在变量施药条件下,植株上中下3层的雾滴沉积密度变异系数均小于15%,满足喷雾机(器)作业质量标准要求,机具整体作业性能良好。变量施药时布样区施药总量为56.43 L, 相比常量施药的施药总量78.96 L,减少农药用量22.53 L,减幅28.5%。该研究可为高茎秆作物病虫害高效精准防治提供新的思路和方法,为新型精准变量施药机械的结构设计和高效施药技术性能优化提供参考。
喷雾;农药;激光雷达;脉宽调制;变量施药;高地隙;喷杆喷雾机
0 引 言
国外的植保机械多以大中型智能化的自走式植保机械为主,工作幅宽越来越大、作业速度越来越高,广泛采用全液压操纵、智能变量控制等技术[1-4]。精准变量施药技术可以根据靶标探测信息的特征来决定施药量的大小,以此改善农药使用的有效性和精准性,实现对靶施药、变量施药、按需施药,达到减少农药用量、实现环境保护与农产品安全生产的目的[5-8]。现阶段,智能探测靶标技术主要包括光传感器、超声波传感器、立体视觉以及激光雷达扫描传感器等各类检测装置[9-10]。其中,激光雷达扫描技术精度高、响应快、能够快速获取靶标作物的三维模型[11-13]。将激光雷达扫描技术与精准变量施药技术有效结合是防治病虫害的重要手段和发展趋势[14-18]。国外对激光雷达探测和变量施药系统的研究开展较早,研究范围广,应用成果多。Tian等[19]设计了一种杂草识别实时变量喷雾系统,该系统融合机器视觉,将变量喷雾技术应用到杂草识别中,并在玉米和大豆田中进行田间试验,可以减少除草剂用量52%~71%。Jaume 等[20]利用激光传感器建立了作物参数测量系统,以葡萄树为对象证实了利用激光雷达测量叶面积指数的可行性,为后续基于叶面积指数的变量施药研究奠定基础。Lebeau等[21-22]基于PWM(Pulse-Width Modulation)模块设计了一种变量喷雾控制器,并通过试验建立了占空比和喷头流量之间的关系。Liu等[23]发展了多路PWM集成化控制器,利用单独的电磁阀对单个喷头进行独立控制,该控制器可以灵活的选择所需控制的喷头个数,为宽幅喷杆的变量施药提供了思路。近年来,国内对智能探测和变量施药技术也开展了相关的研究。李龙龙等[24-25]针对果园精准变量喷雾,设计了基于变风量和变喷雾量的果园自动仿形喷雾机,结合二维雷达探测和PWM变量技术根据树冠信息实现仿形变量喷雾。翟长远等[26]设计了一种车载式变量施药机控制系统,该系统能够根据喷雾机的行走速度自动变更喷药量,且仿真和实际试验表明加速度小于0.4 m/s2时,实际施药量与设定施药量之间的误差不超过8%,但并未针对某一种具体作物进行田间验证试验。
上述研究主要集中在精准变量零部件的研发或者果园变量喷雾,但在高茎秆作物变量喷雾的应用比较少。高地隙喷雾机的优点是地隙高、喷杆喷雾高度可调、通过性能好[27-28],可以对农作物全生长期内进行喷施作业。将智能探测变量施药系统搭载在高地隙喷雾机上,能够解决植株高度对喷施作业的限制,特别是能够解决甘蔗等高茎秆作物后期施药的难题[29-31]。本文将激光雷达探测系统和变量施药系统集成到高地隙喷雾机上,探究高茎秆作物的精准变量施药。使用三维LiDAR对高茎秆作物冠层进行扫描,获取其三维信息和植株高度等特征参数,建立植株高度与施药量之间的数学模型,利用PWM技术控制喷头的开闭程度和喷雾时间,根据植株高度变化实时调节喷雾量,最终实现精准变量施药。
1 基于LiDAR扫描的高地隙宽幅喷雾机变量施药系统
1.1 高地隙喷雾机结构及变量施药系统工作原理
针对农业生产对田间作业机械的需求,本文研发了基于三维LiDAR扫描的高地隙宽幅喷雾机变量施药系统,其中高地隙喷雾机底盘由现代农装科技股份有限公司制造。整机结构如图1所示,主要包括驾驶室、激光雷达、变量控制系统、药箱、底盘、行走机构、悬挂机构、喷雾系统等。

1.激光雷达 2.驾驶室 3.控制系统 4.药箱 5.底盘 6.行走机构 7.悬挂 8.喷雾系统
喷雾机离地间隙1.35 m、喷幅24 m,喷杆共分成5段,每段的喷头个数分别为11、9、9、9和11,共计49个,各段喷杆的长度分别为5、5、4、5和5 m,两侧喷杆沿中心轴对称分布,各段喷杆均由独立的PWM阀控制。药箱容量3 000 L,轮距2.3~2.8 m可调,轴距3.6 m,喷杆喷雾高度在0.5~2.5 m可调。
变量施药控制系统根据激光雷达扫描后实时输入计算机的喷雾量处方图信息,对各组电磁阀进行自动控制,根据田间作物的实际高度进行变量喷施。根据前期对甘蔗等高茎秆作物的考察,发现该类作物植株高度存在差异,所以本文设计的变量施药系统将植株高度作为控制变量。将激光雷达与变量施药控制系统采用CAN通信模块串口连接,其中CAN通信协议要求总线速率为250 kb/s。变量施药系统结构原理如图2所示,激光雷达探测得到的植株三维点云数据和PWM控制器从CAN总线上获取的喷雾机速度信息传递给计算机,融合激光雷达数据与实时速度信息绘制喷雾量处方图并发往PWM控制器,由控制器控制电磁阀开闭实现变量施药。
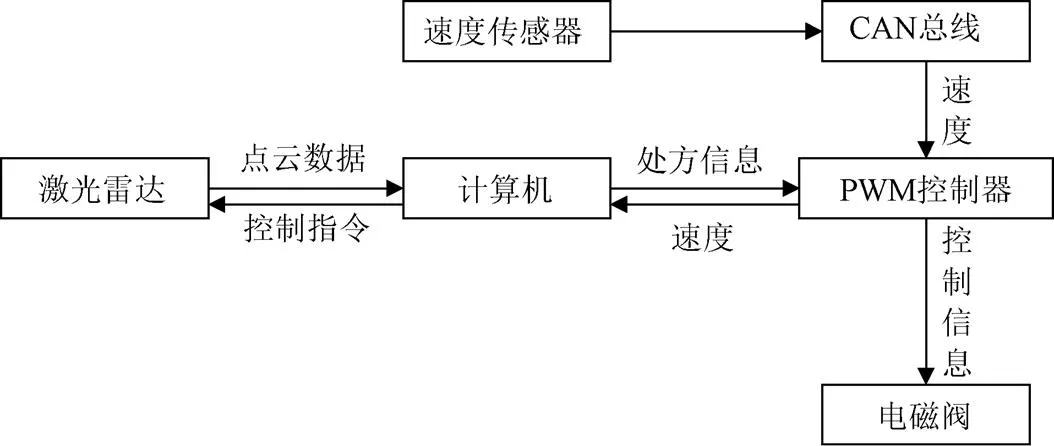
图2 变量施药系统工作原理图
1.2 探测系统组成及数据处理
1.2.1 探测系统
探测系统主要包括电源模块、激光雷达模块、继电控制模块、计算机模块,将各模块集成后安装在喷雾机驾驶室的变量控制箱内。其中,继电控制模块给计算机提供220 V电压,同时将220 V的交流电转换成12 V的直流电给激光雷达供电。计算机采用Intel 760P微型计算机。激光雷达直接连接计算机主机,在显示屏上实时显示扫描后的植株三维点云图。
探测传感器采用16线激光LiDAR(北科天绘公司),型号为R-Fans-16。作业过程中,激光雷达将发射出的激光在雷达前方形成一个圆锥面,16条激光束各自形成一个扫描面进行360°扫描,实现三维探测成像,每秒获取32万个点,最大测距200 m,测距精度2 cm,水平视场角360°,垂直视场角30°(−15°~15°),垂直视场中每条扫描线之间的角度为2°,激光波长905 nm。
1.2.2 数据处理
激光雷达安装在自走式喷雾机驾驶室顶部最前端的中心线上,距离驾驶室玻璃50 cm,保证扫描过程中激光束不被遮挡,离地高度3.6 m,如图3所示。激光雷达的坐标系定义如下:坐标系原点位于设备的中心轴上,轴垂直于R-Fans底面,指向机器的前进方向;轴垂直于地面,指向激光雷达侧面缆线引出的方向;构成右手坐标系。
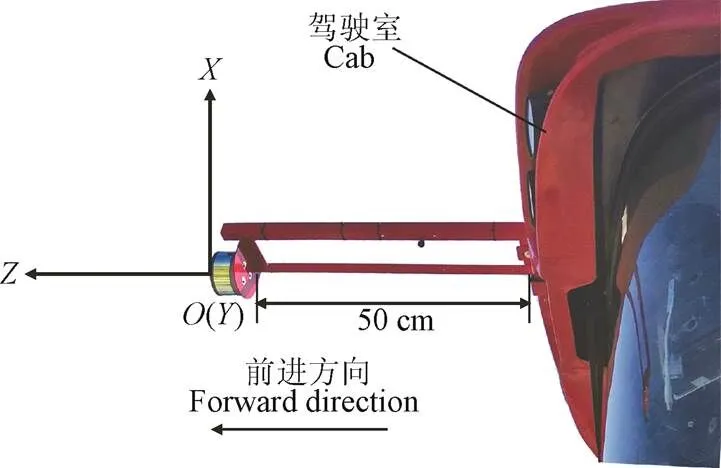
图3 激光雷达安装示意图
为了实现作物参数的实时探测与获取,需要将LiDAR传感器数据进行解算,并与速度传感器进行数据融合,计算得到植株三维点云模型和喷雾量处方图,并将获取的三维极坐标原始数据(,)转变成三维直角坐标(),计算方法如图4所示。得到作物的三维点云后,模拟生成处方图,从处方图中得到对应区域的施药量。
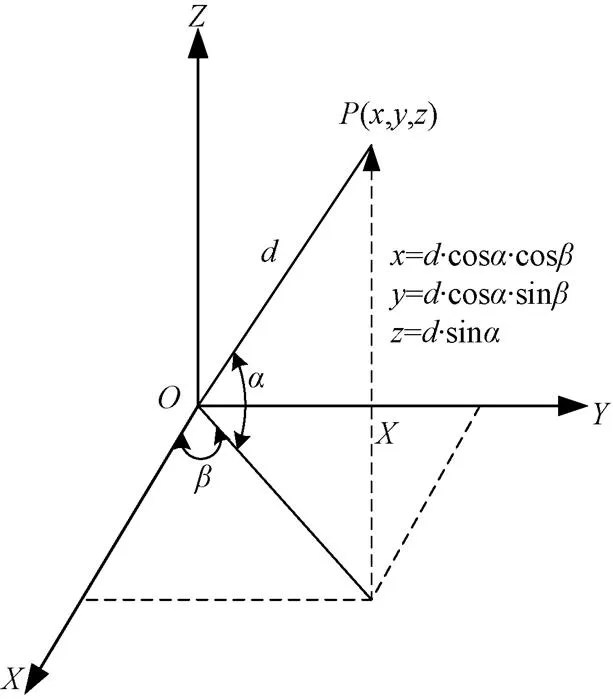
注:P为激光雷达扫描范围内的任意一点;x、y、z分别是P点对应的三维坐标值;d为雷达传感器到扫描点的距离,m;α为P点相对Z轴的垂直角度,(°);β为激光线的扫描角度,(°);d、α、β均在扫描过程中直接获取。
采用Python语言进行编程,将编写好的程序导入到计算机中,运行该程序,利用程序中的设定值计算激光雷达的三维极坐标原始数据,换算出三维坐标值。其中,激光雷达传感器和喷杆之间的水平距离为7.70 m,激光雷达距离地面的高度为3.60 m,保证激光束不被喷雾机和地面所遮挡。
1.3 变量喷雾系统
变量喷雾系统主要包括PWM变量发生模块、PWM变量调节驱动执行模块、电磁阀、压力传感器、流量传感器、液压马达(内置速度传感器)、药箱、隔膜泵、药液管路、控制阀、喷头等。
电磁阀型号为2KS200-20B先导常开型电磁阀(AIRTAC亚德客公司),电磁阀孔径20 mm,最大耐压1.5 MPa。每个电磁阀控制一段喷杆上喷头的开闭,该电磁阀的优点是流量大、体积小、重量轻、拆装方便。阀体材质为SUS304不锈钢,电磁线圈耐热等级为B级。速度传感器置于车轮马达内部,实时感知喷雾机作业速度,并将喷雾机行进过程中的速度信息通过CAN总线实时传递给计算机。马达型号为MS08低速马达,额定压力25 MPa;额定扭矩3 495 N·m。速度传感器为T4旋转式速度传感器,速度检测范围1~200 r/min,响应时间小于2 ms。
图5为喷雾机的变量控制系统,该系统通过管路与喷杆连接,安装于机具后端,包含5路电磁阀与PWM变量控制器,电磁阀由机身电源供电后与PWM发生模块连接,实时接收PWM波信号,并将信号传递给PWM执行驱动模块。PWM变量控制器按照给定的占空比产生相应的PWM波用于控制电磁阀驱动器进而控制电磁阀的开关动作,改变各段对应喷杆的喷头流量。变量施药主要通过调控电磁阀占空比实现,设置电磁阀的作业频率为5 Hz,该频率下占空比和流量的关系呈正相关。
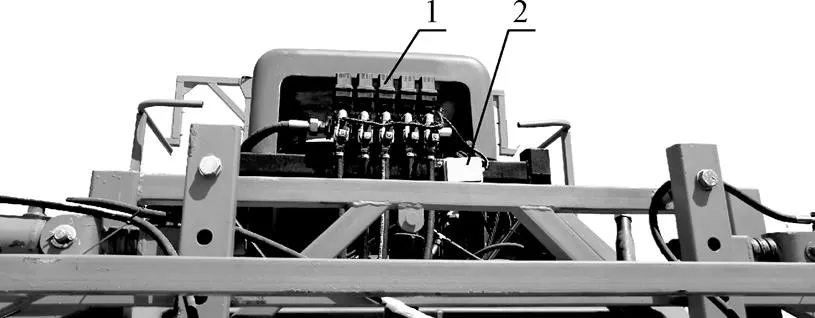
1.五路电磁阀 2.PWM控制器
1.4 冠层分割模型
前期田间实测和调研发现,高茎秆作物的叶面积与植株高度正相关,且大部分植株的叶面积分布较为均匀,只有少数植株的长势出现明显差异,所以本文将作物高度作为自变量,并建立其与施药量之间的数学模型。为了获取作物冠层参数信息,建立施药量和冠层三维参数之间的数学模型,将作业区域进行单元格划分,并对每个小单元格的体积叠加。如图6所示,三维激光雷达扫描传感器沿喷雾机行进方向(即沿着轴从左到右)实时扫描。本次采用的R-Fans-16激光雷达共有5、10和20 Hz三个扫描频率,为了方便计数,选取扫描频率为10 Hz,即一个扫描周期为0.1 s,每扫描一次记为一个横向分割单元,则一个横向单元格在轴方向的扫描距离为
S=(1)
式中S为一个单元格在轴方向的扫描距离,m;为喷雾机的行驶速度,km/h。
喷雾机的喷幅为24 m,则激光雷达在方向的扫描距离为24 m,喷雾系统采用5个电磁阀分别控制各段喷杆,每段喷杆对应一个冠层分割单元,将喷幅范围内的单元格分割成5个,因此由(1)可以确定每一个单元格的体积为

式中V为任一单元格的体积,m3;h为任一单元格的高度,m;为任一单元格在轴方向的距离,m。
试验所用电磁阀的作业频率为5 Hz,作业周期为0.2 s。根据式(2)可以得到电磁阀每个作业周期内各段喷杆扫描过的冠层总体积为
根据式(3)计算各段喷杆在一个喷雾周期内所需要的喷雾量:
式中为任一段喷杆在任一喷雾周期内所需要的施药量,L;为冠层单位体积的施药量,L/m3。
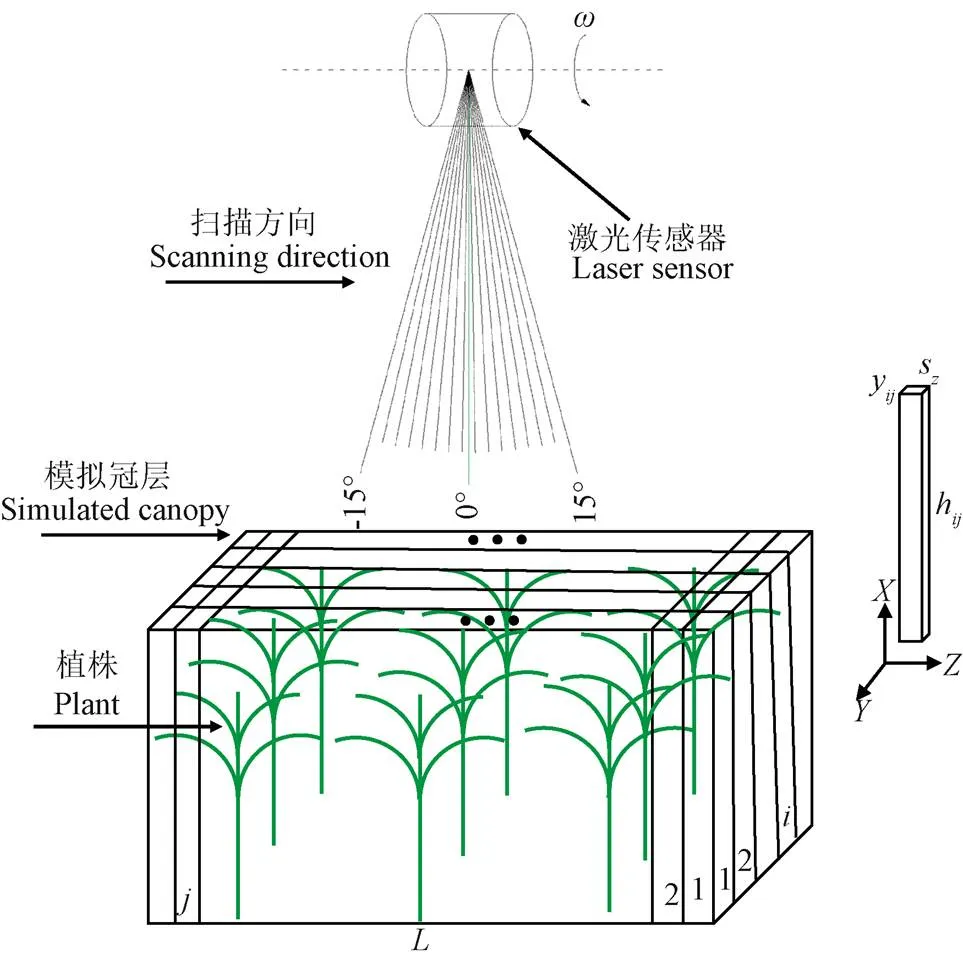
注:L为模拟冠层长度,m;激光传感器位于冠层上方,其竖直视场角为-15°~15°;Sz、yij、hij分别是任一冠层分割单元格的长、宽、高,m;i为喷幅范围内任一冠层分割单元格编号,i=1,2,3,4,5;j为喷雾机行进方向任一冠层分割单元格编号,j=1,2,…,L/v,其中T为激光雷达的扫描周期,s;ω为雷达内部激光束的扫描旋转角速度,rad·s-1。
根据式(4)可得:
式中q为第段喷杆任一喷头的流量,L/min;n为第段喷杆对应的喷头个数。
由于在一定的压力和频率范围条件下,单喷头流量和占空比之间为线性关系:
其中x为第段喷杆对应电磁阀的占空比;,为常数,取值跟频率和压力设定相关。
联合式(5)~(6)可得:
所以,单段喷杆对应电磁阀的占空比为
1.5 通信系统
通信系统主要由PC端、CAN总线通信模块、PWM波发生模块、PWM调节驱动执行模块组成。其中,CAN 总线通信模块既向CAN总线发送求解的数据,又从CAN总线接收响应数据用于求解其他数据或将数据返回给PC端。PWM波发生模块通过串口接收来自CAN总线通信模块发送的占空比,按照冠层检测得到的实时占空比产生相应的PWM波用于控制电磁阀开闭动作。PWM驱动执行模块直接与5路电磁阀连接,电磁阀通过管路和喷头连接。
本文设计的通信系统采用基于stm32单片机的CAN总线通信模块,该模块主要由stm32f103(u1)系列单片机与TJA1050(u2)芯片两部分构成。其中stm32f103系列单片机完成CAN总线的基本协议通信,包括接收总线数据、对接收到的数据进行计算处理、将处理后的数据返回CAN总线,主要由电源、晶振、复位电路组成。TJA1050芯片将单片机的TTL电平信号转换为CAN总线电平,实现CAN总线协议的通信。
2 田间作业性能试验
2.1 试验条件
田间试验在广西北海市合浦县的甘蔗地进行,合浦县位于广西西南部,常年种植甘蔗。试验地甘蔗株距17 cm,行距1.2 m,由于土壤肥力不均等因素,株高分布在1.2~2.0 m范围,平均株高1.7 m左右。试验于2019年10月24日进行,试验期间温度22.0~24.4 ℃,湿度65.0%~70.0%,空气流速0.9~1.5 m/s,喷雾机的行驶速度为5 km/h。
2.2 试验材料及方法
主要试验材料:基于LiDAR扫描的高地隙宽幅变量喷杆喷雾机(喷雾压力0.3 MPa),POCKETWIND IV手持式风速及温湿度测量仪(德国Lechler公司),ST110-05喷头(德国Lechler公司),水敏纸(2.6 cm× 7.5 cm),扫描仪(HP Scanjet 5590)。
试验内容与方法:对不同布样区的冠层高度进行扫描,并与实际测量高度进行对比,验证雷达探测系统的株高探测准确性。对不同高度冠层的变量施药效果和同一冠层不同高度叶片的雾滴沉积分布进行测试,通过水敏纸上的雾滴个数及沉积密度对比变量施药和常量施药2种情况下的雾滴沉积分布状态,验证该喷雾机雷达扫描系统与变量施药系统与冠层高度的匹配性。试验结束后,采用Depositscan软件对不同冠层高度的雾滴沉积密度进行计算,分析变量施药系统基于株高的施药准确性;利用叶片表面的雾滴沉积分布变异系数CV(Coefficient of Variation)描述植株垂直方向的雾滴沉积分布均匀性。其中,常量施药是指电磁阀保持常开状态,激光雷达处于关闭状态;变量施药是指电磁阀和激光雷达均处于工作状态。
试验区的总面积为200 m´24 m,基于喷杆喷雾机左右喷杆的对称性,选取右侧两段喷杆及中间喷杆共3段喷杆扫过的3个区域作为布样区,如图7所示,共计9个布样区,每个布样区选取3处布样点,每处选择3株甘蔗进行布样,共计81株甘蔗样本,将每株甘蔗按照茎秆高度等分为上中下3层,每层各布一个水敏纸,水敏纸用双头夹夹到甘蔗茎秆上,方向垂直于甘蔗茎秆,水平展开。布样前在喷雾机的行进方向预留30 m作为加速区,布样区后50 m作为减速缓冲区。
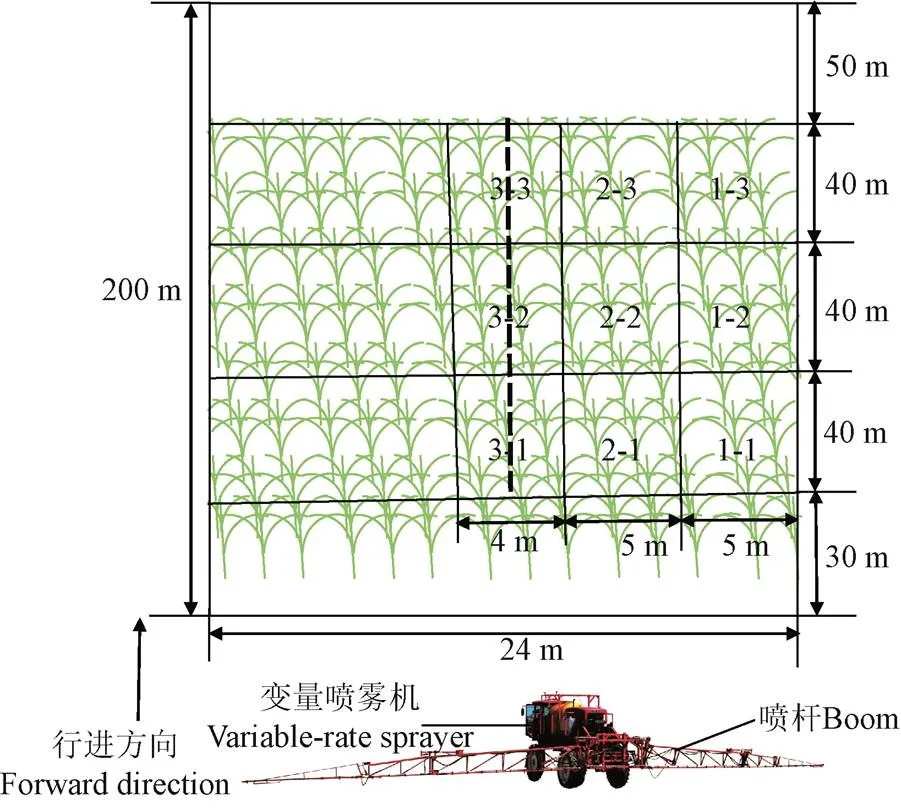
注:布样区编号记为i-j,其中i为右侧各段喷杆从右到左的编号,j为各段喷杆沿喷雾机具行进方向扫过的面积分区,i=1,2,3;j=1,2,3。
2.3 试验结果与分析
表1为甘蔗的实测株高和激光雷达扫描结果的对比,从表1中可以看出,株高扫描结果和测量结果的最大误差为8.42%,最小误差为0.17%,平均误差为4.59%,说明激光雷达对甘蔗株高的扫描准确性良好。
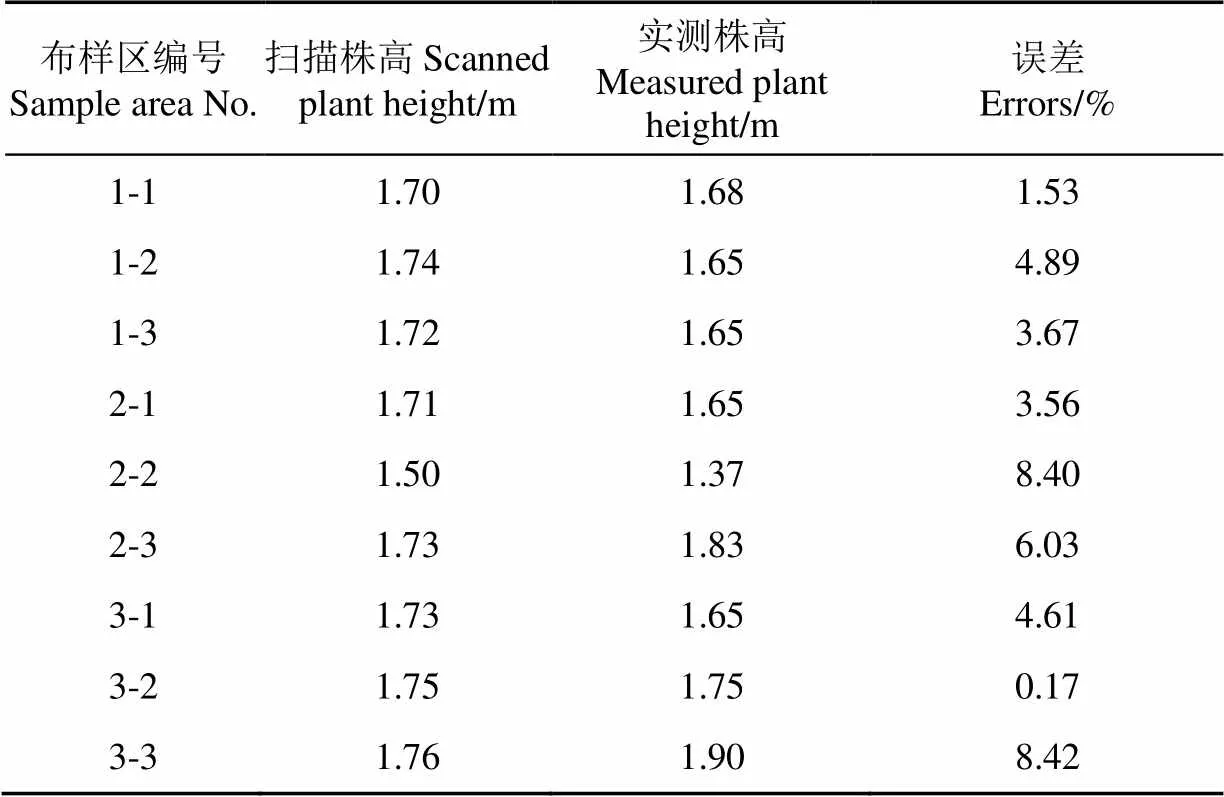
表1 甘蔗株高实测值与激光雷达扫描结果对比
图8为不同作业小区不同株高的常量施药和变量施药雾滴沉积密度分布图,从图中可以看出:常量施药时,雾滴沉积密度随着植株高度的变化较小,基本保持在平均值86.7个/cm2左右;变量施药时,雾滴密度随着作物高度的不同而变化,植株高度越大,喷雾量越大,雾滴沉积密度越高,当平均株高从1.50 m变化到1.76 m时,雾滴沉积密度增加73.37个/cm2,且最小雾滴沉积密度为34.2个/cm2,高于农药喷雾机田间操作规程及喷洒质量评定标准GB/T 17997-2008最小雾滴沉积密度不少于30个/cm2的要求[32]。变量施药时布样区施药总量为56.43 L,相比常量施药的施药总量78.96 L,减少农药用量22.53 L,减幅28.5%。该变量施药系统在满足病虫害防治要求的前提下,可以实现高茎秆作物的按需施药。
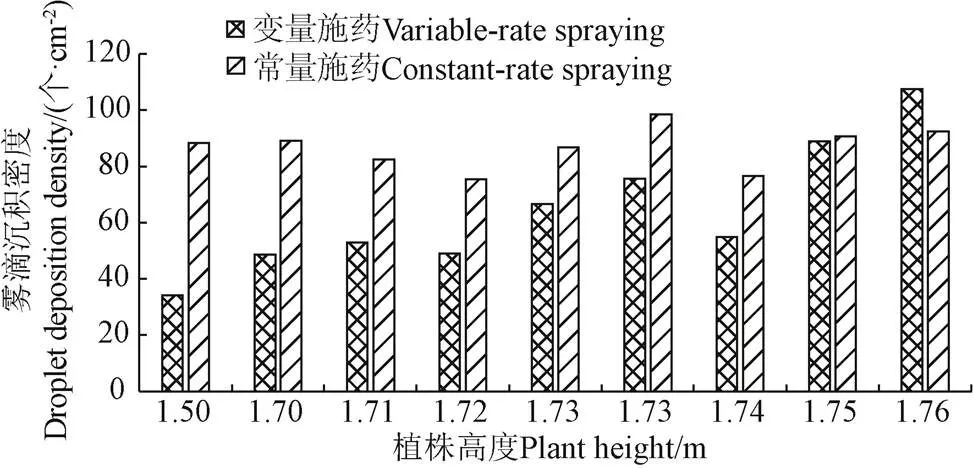
图8 不同株高的雾滴沉积密度
图9为变量施药的植株叶片表面雾滴分布,从图中可以看出,在株高较低的2-2区,雾滴上、中、下3层沉积密度分别为34.2、32.1、30.6个/cm2;在株高较高的3-3区,雾滴上、中、下3层沉积密度分别为107.57、101.83、118.43个/cm2,各层雾滴沉积密度随株高的增大而增大,其余区域呈现相同变化趋势。经过计算,上、中、下3层的雾滴沉积密度CV值最大为13.19%,满足喷雾机(器)作业质量NY/T 650-2013[33]中对雾滴分布均匀性(变异系数)不大于15%的要求,机具作业性能良好。通常情况下雾滴沉积密度大小从上到下为上层、中层、下层,而个别中层或者下层雾滴密度大于上层是因为在作业过程中,可能会出现上层作物叶片雾滴聚集滑落到中、下层的现象,导致中、下层的雾滴多于上层雾滴。
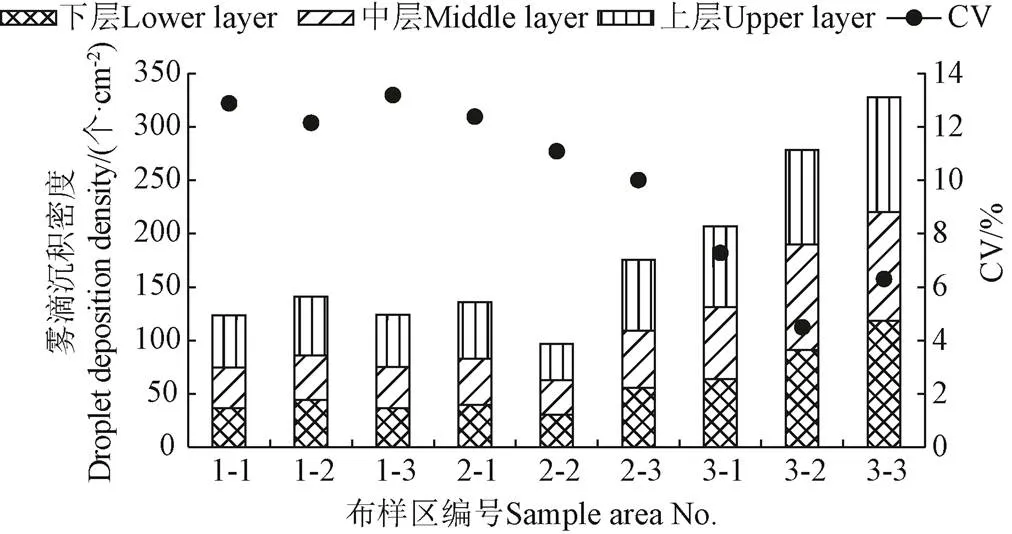
图9 变量施药的植株叶片表面雾滴分布
3 结 论
本文研制了基于三维LiDAR扫描的高地隙宽幅喷雾机变量施药系统,根据田间试验结果得到以下主要结论:
1)设计的基于三维LiDAR扫描的高地隙喷雾机变量施药系统,满足设计需要,可以实现甘蔗等高茎秆作物不同生长期内的变量施药。
2)利用三维激光雷达对甘蔗株高进行扫描,扫描株高和测量株高的最大误差为8.42%,最小误差为0.17%,平均误差为4.59%,说明激光雷达的株高扫描结果准确。
3)研发的变量施药系统可以根据高茎秆作物生长高度的变化进行变量施药,且施药后的叶片雾滴沉积密度均高于农药喷雾机田间操作规程及喷洒质量评定对作物病虫害防治的要求,该变量施药系统在满足病虫害防治要求的前提下,可以实现高茎秆作物的按需施药。
4)开启变量施药系统后,不同小区的植株上、中、下3层叶片的雾滴沉积密度随高度变化呈现相同变化规律,且植株叶片上、中、下3层雾滴沉积密度变异系数最大为13.19%,满足喷雾机(器)作业质量中对雾滴分布变异系数不大于15%的要求,机具整体作业良好。
本文研制的变量施药系统主要面向甘蔗等高茎秆作物,对于少数长势差异化较为明显的植株,系统的适用性有待于进一步验证。
[1] 马良,沈景新,李青龙,等. 智能水、旱两用全液压高地隙变量施药机的设计[J]. 农业装备与车辆工程,2018,56(3):24-27.
Ma Liang, Shen Jingxin, Li Qinglong, et al. Design of intelligent full hydraulic variable gap sprayer used in paddy field and dry farmland[J]. Agricultural Equipment & Vehicle Engineering, 2018, 56(3): 24-27. (in Chinese with English abstract)
[2] Jeon H Y. Development of a variable-rate sprayer for nursery liner applications[J]. Transactions of the ASABE, 2012, 55(1): 303-312.
[3] Pierce R A, Ayers P D. Evaluation of deposition and application accuracy of a pulse width modulation variable rate field sprayer[C]// 2001 ASAE Annual International Meeting, 2001.
[4] 邱白晶,闫润,马靖,等. 变量喷雾技术研究进展分析[J]. 农业机械学报,2015,46(3):59-72.
Qiu Baijing, Yan Run, Ma Jing, et al. Research progress analysis of variable rate sprayer technology[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3): 59-72. (in Chinese with English abstract)
[5] 张美娜,吕晓兰,邱威,等. 基于三维激光点云的靶标叶面积密度计算方法[J]. 农业机械学报,2017,48(11):172-178.
Zhang Meina, Lv Xiaolan, Qiu Wei, et al. Calculation method of leaf area density based on three-dimensional laser point cloud[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(11): 172-178. (in Chinese with English abstract)
[6] 李鑫慧,郭蓬,臧晨,等. 激光雷达技术研究现状及其应用[J]. 汽车电器,2019(5):4-6.
Li Xinhui, Guo Peng, Zang Chen, et al. Research status and application of LiDAR technology[J]. Auto Electric Parts, 2019(5): 4-6. (in Chinese with English abstract)
[7] Yan Tingting, Wang Xiaochan, Zhu Heping, et al. Evaluation of object surface edge profiles detected with a 2-D laser scanning sensor[J]. Sensors, 2018, 18(11): 4060.
[8] Gregorio Eduard, Rosell-Polo Joan R, Sanz Ricardo, et al. LIDAR as an alternative to passive collectors to measure pesticide spray drift[J]. Atmospheric Environment, 2014, 82: 83-93.
[9] 韦雪花,王永国,郑君,等. 基于三维激光扫描点云的树冠体积计算方法[J]. 农业机械学报,2013,44(7):235-240.
Wei Xuehua, Wang Yongguo, Zheng Jun, et al. Tree crown volume calculation based on 3-D laser scanning point clouds data[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(7): 235-240. (in Chinese with English abstract)
[10] 束义平. 基于激光雷达探测技术的果园变量喷雾控制系统研究[D]. 南京:南京林业大学,2018.
Shu Yiping. Research on Control System of Orchard Variable Rate Spray Based on LiDAR Detection Technology[D]. Nanjing: Nanjing Forestry University, 2018. (in Chinese with English abstract)
[11] 初金哲. 精准变量施肥控制软件设计与试验研究[D]. 大庆:黑龙江八一农垦大学,2018.
Chu Jinzhe. The Design and Experimental Research of Precision Variable Rate Fertilization Control Software[D]. Daqing:Heilongjiang Bayi Agricultural University, 2018. (in Chinese with English abstract)
[12] 魏新华,蒋杉,张进敏,等. 脉宽调制间歇喷雾变量喷施系统施药量控制[J]. 农业机械学报,2013,44(2):87-92.
Wei Xinhua, Jiang Shan, Zhang Jinmin, et al. Application rate control characteristics of blended pulse variable rate application system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(2): 87-92. (in Chinese with English abstract)
[13] 高锐涛,单建,杨洲,等. 植保无人机变量喷雾处方图实时解译系统的设计与试验[J]. 吉林大学学报:工学版,2020,50(1):361-374.
Gao Ruitao, Dan Jian, Yang Zhou, et al. Real-time interpretation system of variable spray prescription map based on plant protection UAV[J]. Journal of Jilin University: Engineering and Technology Edition, 2020, 50(1): 361-374. (in Chinese with English abstract)
[14] Arvidsson Tommy, Bergstrom Lars, Kreuger Jenny. Comparison of collectors of airborne spray drift. Experiments in a wind tunnel and field measurements[J]. Pest Management Science, 2011, 67(6): 725-733.
[15] Nilsson Mats. Estimation of tree heights and stand volume using an airborne LiDAR system[J]. Remote Sensing of Environment, 1996, 56(1): 1-7.
[16] Chen Yu. Spray deposition inside tree canopies from a newly developed variable-rate air-assisted sprayer[J]. Transactions of the ASABE, 2013, 56(6): 1263-1272.
[17] 陈黎卿,许泽镇,解彬彬,等. 无人驾驶喷雾机电控系统设计与试验[J]. 农业机械学报,2019,50(1):122-128.
Chen Liqing, Xu Zezhen, Jie Binbin, et al. Design and test of electronic control system for unmanned drive sprayer[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(1): 122-128. (in Chinese with English abstract)
[18] 刘道奇. 悬挂式喷杆喷雾机变量喷雾系统设计及试验分析[D]. 郑州:河南农业大学,2018.
Liu Daoqi. Design and Test Analysis of Variable Spray System for Suspended Boom Sprayer[D]. Zhengzhou: Henan Agricultural University, 2018. (in Chinese with English abstract)
[19] Tian L. Development of a sensor-based precision herbicide application system[J]. Computers & Electronics in Agriculture, 2002, 36(2/3): 133-149.
[20] Jaume Arnó, Alexandre Escolà, Josep M, et al. Leaf area index estimation in vineyards using a ground-based LiDAR scanner[J]. Precision Agriculture, 2013, 14(3): 290-306.
[21] Lebeau F, El Bahir L, Destain M F, et al. Improvement of spray deposit homogeneity using a PWM spray controller to compensate horizontal boom speed variations[J]. Computers and Electronics in Agriculture, 2004, 43(2): 149-161.
[22] Lebeau F. Modelling the dynamic distribution of spray deposits[J]. Biosystems Engineering, 2004, 89(3): 255-265.
[23] Liu Hui. Development of digital flow control system for multi-channel variable-rate sprayers for multi-channel variable-rate sprayers[J]. Transactions of the ASABE, 2014, 57(1): 273-281.
[24] 李龙龙,何雄奎,宋坚利,等. 基于变量喷雾的果园自动仿形喷雾机的设计与试验[J]. 农业工程学报,2017,33(1):70-76.
Li Longlong, He Xiongkui, Song Jianli, et al. Design and experiment of automatic profiling orchard sprayer based on variable air volume and flow rate[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(1): 70-76. (in Chinese with English abstract)
[25] 李龙龙,何雄奎,宋坚利,等. 基于高频电磁阀的脉宽调制变量喷头喷雾特性[J]. 农业工程学报,2016,32(1):97-103.
Li Longlong, He Xiongkui, Song Jianli, et al. Spray characteristics on pulse-width modulation variable application based on high frequency electromagnetic valve[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(1): 97-103. (in Chinese with English abstract)
[26] 翟长远,朱瑞祥,随顺涛,等. 车载式变量施药机控制系统设计与试验[J]. 农业工程学报,2009,25(8):105-109.
Zhai Changyuan, Zhu Ruixiang, Sui Shuntao, et al. Design and experiment of control system of variable pesticide application machine hauled by tractor[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2009, 25(8): 105-109. (in Chinese with English abstract)
[27] 李锟. 高地隙喷药机设计及其变量施药系统研究[D]. 哈尔滨:哈尔滨理工大学,2015.
Li Kun. Design and Research on Variable-Rate Spraying System of High Clearance Sprayer[D]. Harbin: Harbin University of Science and Technology, 2015. (in Chinese with English abstract)
[28] 刘兆朋,张智刚,罗锡文,等. 雷沃ZP9500高地隙喷雾机的GNSS自动导航作业系统设计[J]. 农业工程学报,2018,34(1):15-21.
Liu Zhaopeng, Zhang Zhigang, Luo Xiwen, et al. Design of automatic navigation operation system for Lovol ZP9500 high clearance boom sprayer based on GNSS[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(1): 15-21. (in Chinese with English abstract)
[29] 蒋斌,李林,李晋阳,等. PWM变量喷施控制系统中电磁阀通径对喷雾压力的影响[J]. 农机化研究,2018,40(5):164-169.
Jiang Bin, Li Lin, Li Jinyang, et al. Influence on spray pressure fluctuation from pipe diameter in PWM - based variable rate application system[J]. Journal of Agricultural Mechanization Research 2018, 40(5): 164-169. (in Chinese with English abstract)
[30] 汪世财. 基于三维激光雷达的障碍物检测与跟踪研究[D]. 合肥:合肥工业大学, 2018.
Wang Shicai. Research on Obstacle Detection and Tracking Based on 3D LIDAR[D]. Hefei: Hefei University of Technology, 2018. (in Chinese with English abstract)
[31] 张凯良,胡勇,杨丽,等. 玉米收获机自动对行系统设计与试验[J]. 农业机械学报,2020,51(2):103-114.
Zhang Kailiang, Hu Yong, Yang Li, et al. Design and experiment of auto-follow row system for corn harvester[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(2): 103-114. (in Chinese with English abstract)
[32] 中华人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会. 农药喷雾机(器)田间操作规程及喷洒质量评定: GB/T 17997-2008[S]. 北京:中国标准出版社,2008.
[33] 中华人民共和国农业部. 喷雾机(器)作业质量: NY/T 650-2013[S]. 北京:中国农业出版社,2014.
Development of variable-rate spraying system for high clearance wide boom sprayer based on LiDAR scanning
Qiao Baiyu1, He Xiongkui1※, Wang Zhichong1, Han Leng1, Liu Weihong1, Dong Xiang2, Liang Wenpeng3
(1,100193,; 2.100083; 3.530007,)
In order to improve the level of mechanized pest control and pesticide application technology of crops with high stalk such as sugarcane, and solve the problems existed at present including field entry difficult, pesticides dosage large and utilization rate low for common sprayers, a variable-rate spraying system for the high clearance wide boom sprayer based on 3D LiDAR real-time scanning was developed. The sprayer used for the system had a width of 24 m, a ground clearance of 1.35 m and an adjustable boom height from 0.5 to 2.5 m. 16-line 3D LiDAR sensor was adopted to detect the three-dimensional information of crops in real time. The PWM(Pulse-Width Modulation)controller installed on the rear of the machine obtained the speed information of the sprayer from the CAN bus and transferred it to the computer in the sprayer cab. The control program was set up by Python software, and the relevant spray quantity prescription map was drawn by integrating the scanning data of LiDAR and real-time speed information, then the information obtained was sent out to PWM controller, each of which controlled one stage boom. A mathematical model between the crop canopy height and duty cycle of the solenoid valves was established to obtain the needed spraying volume by controlling the opening and closing of the solenoid valves by the controller. In order to verify the accuracy of the variable-rate spraying system, after the system was assembled, field tests were carried out in sugarcane fields in Guangxi province. The results showed that with the change of sugarcanes plant height, the maximum error between the height of sugarcanes scanned by LiDAR and measured was 8.42%, the minimum error was 0.17%, and the average error was 4.59%, the LiDAR had a good accuracy in scanning and identifying sugarcane height. The recognized information could be accurately transmitted to the variable-rate spraying system. When the variable-rate spraying system opened, the droplet density changed with the plant height,the higher the plant height, the greater the spray volume, and the higher the droplet deposition density. When the average plant height changed from 1.50 to 1.76 m, the droplet deposition density increased by 73.37 drops/cm2, and the minimum droplet deposition density was 34.2 drops/cm2, which was higher than the requirements of GB/T 17997-2008 not less than 30 drops/cm2, the maximum coefficient of variation of droplet deposition density in upper, middle and lower layers of the plants was 13.19%, which met the requirements of NY/T 650-2013, the variable-rate spraying system could meet the requirements of pest control and could achieve pesticide application on demand. The total amount of pesticide application was 56.43 L for variable-rate spraying, which was 22.53 L and 28.5% lower than 78.96 L of constant-rate spraying. This study provides a new idea and method for the high-efficient and precise control of plant diseases and insect pests, and provide a reference for the structural design of new precision variable-rate spraying machines.
spray; pesticide; LiDAR; PWM; variable-rate spray; high clearance; boom sprayer
乔白羽,何雄奎,王志翀,等.基于LiDAR扫描的高地隙宽幅喷雾机变量施药系统研制[J]. 农业工程学报,2020,36(14):89-95.doi:10.11975/j.issn.1002-6819.2020.14.011 http://www.tcsae.org
Qiao Baiyu, He Xiongkui, Wang Zhichong, et al. Development of variable-rate spraying system for high clearance wide boom sprayer based on LiDAR scanning[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(14): 89-95. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.14.011 http://www.tcsae.org
2020-03-07
2020-07-02
国家重点研发计划(2017YFD0700903,2017YFD0200304);基本科研业务费专项资金项目(2019TC230)
乔白羽,博士生,主要从事植保机械与施药技术研究。Email:992670374@qq.com
何雄奎,教授,博士生导师,主要从事植保机械与施药技术研究。Email:xiongkui@cau.edu.cn
10.11975/j.issn.1002-6819.2020.14.011
S491
A
1002-6819(2020)-14-0089-07
