基于ANSYS-ADAMS的立式油菜割晒机铺放角形成机理
2020-09-21李海同吴崇友沐森林关卓怀
李海同,吴崇友,沐森林,关卓怀,江 涛
基于ANSYS-ADAMS的立式油菜割晒机铺放角形成机理
李海同,吴崇友※,沐森林,关卓怀,江 涛
(农业农村部南京农业机械化研究所,南京 210004)
为提高油菜割晒作业性能,研究油菜植株参数和割晒机参数对铺放角的影响规律,该研究利用ANSYS软件和ProE软件分别建立油菜植株的柔性体和割晒机模型,在ADAMS软件中建立割晒机-油菜植株刚柔耦合模型,开展油菜植株铺放过程单因素与多因素仿真试验。单因素试验结果表明:油菜植株高度在1.2~1.6 m范围内,铺放角先减小后增加且在植株高度为1.4 m时取得最小值;油菜植株质量密度在438~588 kg/m3范围内,铺放角先增加后减小且在质量密度为538 kg/m3处取得最大值;植株与植株的摩擦系数在0.1~0.5范围内,摩系数越大铺放角越小。多因素响应面试验结果表明:输送链与前进速度的速比、前进速度、割茬高度、输送链速度与前进速度的速比及前进速度与割茬高度的交互作用对铺放角的影响极显著(<0.01),显著性顺序从大到小为输送链速度与前进速度的速比、前进速度、割茬高度;根据多因素试验结果建立铺放角的三元二次回归方程模型,并建立响应面分析多因素交互作用对铺放角的影响规律;建立目标优化方程组,确定割晒机最优作业参数组合为前进速度0.6 m/s,速比1.37,割茬高度0.42 m。田间试验结果表明,优化作业参数条件下,铺放角预测值与实测值的相对误差小于6%;与对照相比,铺放角由134.9°下降为115.8°,角度差由11.2°下降为9.6°,根差由0.22 m下降为0.14 m,割晒损失率由2.2%下降为1.5%,割晒机作业性能提高。研究结果可为油菜割晒作业的适宜条件确定和割晒机作业参数优化提供依据。
农业机械;收获;油菜;铺放角;刚柔耦合模型;响应面分析;优化
0 引 言
油菜机械化收获主要有分段收获和联合收获2种方式[1-3],分段收获采用先割晒铺放,再捡拾脱粒的作业流程,可充分利用油菜的后熟特性,既保证了脱粒前籽粒成熟度一致,又实现了油菜籽充分完熟,保障了菜油的品质[4-7],具有收获期长、对油菜的成熟度及其一致性和株型等不敏感、收获损失率小等特点[8-10]。铺放角是评价油菜割晒铺放质量的重要指标之一,可反映割晒机的作业性能,研究割晒参数对铺放角的影响规律可为割晒机设计与优化提供依据。
李平等[11-12]设计了集成横向和纵向输送的组合式茎秆输送装置的4SY-1.8改进型油菜割晒机,田间试验表明该机收获直播油菜时,上、下层油菜茎秆铺放角分别为23.6°和17.1°,角度差小于10°,得到影响割晒机田间作业质量的主要因素,并确定了油菜割晒机的最佳参数范围。金诚谦等[13-14]研制了与联合收割机底盘配套的4SY–2型油菜割晒机,确定了单带式输送器、横向输送机构与纵向输送机构的参数,田间试验表明割晒作业损失率较低,铺放角度差为6.77º。石增祥等[15]对油菜茎秆在割晒机铺放输送装置上的运动情况和梳理推送抛送条件进行理论分析,得出铺放角由油菜生物学特性和割晒机结构和运行参数决定。王修善等[16]通过分析油菜植株有序铺放条件,从理论上得出立式割台油菜割晒机前进速度和输送速度对铺放角的影响规律,田间试验结果表明铺放角为98.2°,角度差10.5°,割茬高度350 mm。现阶段对油菜割晒机铺放角的研究,主要是利用理论分析与田间试验相结合方法,探究割晒机参数和油菜物料参数对铺放角的影响,但由于田间试验受收获季节限制,国内外对铺放角的研究少见报道,缺少割晒作业条件和参数优化的理论依据。
随着计算机技术和软件水平的发展,计算机辅助设计及模拟仿真已作为一种重要的研究方法应用于相关领域[17-18]。利用计算机开展割晒机仿真试验,可突破季节条件限制,提高试验的速度和精度,有利于缩短研发周期,节约试验成本。为此,本文通过分析立式油菜割晒机铺放过程建立铺放角的数学模型,分析铺放角的影响因素;利用有限元软件ANSYS建立油菜植株的柔性体模型,并导入ADAMS中建立割晒台-油菜刚柔耦合模型;开展单因素与多因素响应面仿真试验,分别研究油菜植株物料参数和割晒机作业参数对铺放角的影响规律,并进行田间验证试验,以期为油菜割晒适宜条件选择和割晒机作业参数优化提供依据。
1 割晒机结构与工作原理
1.1 割晒机整机结构
手扶立式割台油菜割晒机主要由机架、行走底盘、传动系统、水平切割器、侧边切割器、横向输送链组和分行器等部件组成,整机结构如图1所示。行走底盘为履带式手扶拖拉机,割台挂接在底盘前方并可调节割茬高度,侧边切割器安装于机架左侧将待割区与未割区交错的油菜切割分离开来,横向输送链组平行安装于机架上、中、下部,分行器总成安装于机架前端并向前伸出。

1.机架 2.割茬高度调节机构 3.行走底盘 4.发动机 5.链条 6.变速箱 7.割台机架 8.侧边切割器 9.横向输送链 10.水平切割器 11.分行器 12.地面
1.2 工作原理
立式割台割晒机作业时,侧边切割器将割晒机正前方待割区与未割区交错缠绕的分枝剪断分开并推向两侧;机器正前方的油菜在分行器作用下运动至割台,被水平切割器切断后在分行器和上、中、下3条横向输送链的夹持输送作用下向割台右侧输送,脱离横向输送链后油菜植株在自重和横向输送链与机组纵向前进速度所形成的惯性力作用下向割台右侧连续铺放,形成侧边条铺,便于晾晒。
1.3 主要技术参数
立式割台油菜割晒机为手扶悬挂式,参考现有割晒机相关标准及后续油菜捡拾机作业要求,其主要技术参数为:发动机功率7.5 kW,割副1.2 m,前进速度0.6~1.0 m/s,横向输送链速度0.8~1.4 m/s,割茬高度0.2~0.5 m。
2 铺放过程与铺放角分析
2.1 铺放过程植株受力及运动过程分析
脱离割台至铺放成行的过程中,油菜植株的运动过程中与割台的相对位置关系如图2所示。
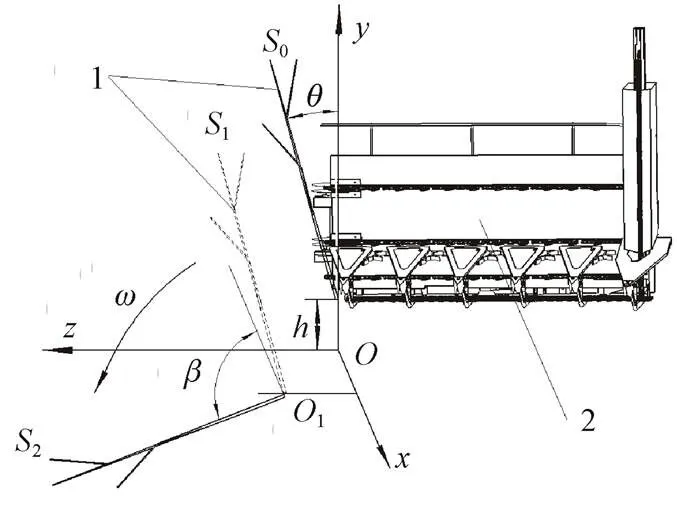
1.油菜植株 2.油菜割晒机
1.Rape plant 2.Rape windrower
注:为坐标原点,、为坐标轴;1为油菜植株落地点;为油菜植株的初始倾角,(°);为割茬高度,mm;为油菜植株的转动角速度,rad·s-1;为铺放角,(°);0为油菜植株的初始位置;1为油菜植株与地面接触时的位置;2为油菜植株的最终铺放位置。
Note:is coordinate origin;、are axis;1is the landing point of rape plant;is the initial dip angle of rape plant, (°);is stubble height, mm;is the angular velocity of rape plant, rad·s-1;is laying angle, (°);0is the initial position of rape plant;1isthe position of rape plant in contact with ground;2isthe final laying position of rape plant.
图2 油菜植株与割晒机位置关系示意图
Fig.2 Schematic diagram of position relationship between rape plant and windrower
根据油菜植株的运动过程和受力情况,铺放过程分为2个连续的过程:倾角为的油菜植株脱离割晒机作用至底端接触地面的三维平动,即由位置0至位置1的下落过程;油菜植株以落地点为旋转点绕底端转动至铺放于地面的过程,即由位置1至位置2的转动过程。
2.1.1 油菜植株下落过程分析
油菜植株在下落过程中的运动为三维空间内的平抛运动,以植株离开割台瞬间最下端在地面的投影点为坐标原点建立笛卡尔坐标系,轴正方向为割晒机前进方向,轴垂直向上,轴正方向为横向输送速度方向。油菜植株平抛运动在3个方向的运动分别为:方向的与机器前进速度相等的匀速运动,方向的初速度为0的自由落体运动,方向的与横向输送速度相等的匀速运动。依据文献[16]可知,油菜植株下落过程结束时植株底端在3个方向上的坐标和速度分别为

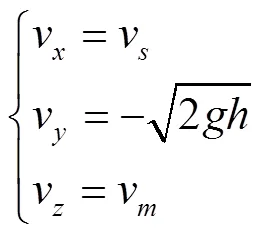
式中x、y、z为油菜植株底端在3个方向的坐标;v为割晒机前进速度,m/s;v为横向输送链速度,m/s;为油菜植株底端与地面的距离,即割茬高度,m;v为油菜植株底端在方向上的速度,m/s;v为油菜植株底端在方向上的速度,m/s;v为油菜植株底端在方向上的速度,m/s;为重力加速度,9.8 m/s2。
由此可得油菜下落过程的运动时间1、植株的合速度1与轴的夹角1分别为

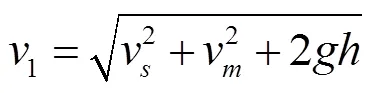

式中1为油菜植株下落时间,s;

油菜植株底端与地面接触时发生完全非弹性碰撞,碰撞后油菜植株由空间刚体平动变成绕落地点1的转动。碰撞过程中油菜植株的动量守恒方程为
1-0sin=0 (6)
由此求得碰撞后油菜植株的角速度
式中为植株的质量,kg;0为质心到底端的距离,m,为植株对1点的转动惯量,kg·m2。
由下落过程分析可以得到下落过程结束时油菜植株的位置、速度和角速度等状态参数,确定植株转动过程分析的初始条件。
2.1.2 油菜植株转动过程分析
油菜植株与地面碰撞后绕落地点1转动,割晒机连续作业时由于相互牵连的油菜植株存在相对运动而产生摩擦力,速度较小的油菜植株对速度较大的油菜植株产生的摩擦牵连力,已铺放油菜植株对处于转动过程中的油菜植株的摩擦力为阻力。因此转动过程中作用于油菜植株的力包括重力、牵连力1和阻力2。
重力作用于油菜植株质心,竖直向下;牵连力1作用于油菜角果层交错重叠区域,方向与植株运动速度相反,大小由重叠系数、摩擦系数等参数决定;阻力2作用于已铺放油菜的分枝与植株分枝交错重叠的区域,方向与机组前进方向相反,大小由重叠系数、压力、摩擦系数等参数决定。转动过程中油菜植株的受力分析如图3所示。
油菜植株转动过程中牵连力1和阻力2的大小由多个因素决定,因此利用式(8)的多元方程表达其大小。

式中为包含摩擦系数1、重叠系数2、时间等参数的多维矩阵;1为到1的映射法则;为包含摩擦系数1、压力2、时间等参数的多维矩阵;2为到2的映射法则。
由油菜植株绕1点定轴转动动能定理得

式中1为角果层与1的距离,m。
由角动量定理可得
由式(11)可得油菜植株在转动过程中的运动时间(2)为


注:v为油菜植株运动速度,m·s-1;γ为油菜植株运动速度与植株主干线的夹角,(°);α为油菜植株速度与y轴的夹角,(°);G为油菜植株重力,N;F1为牵连力,N;F2为阻力,N。
由转动过程分析得到油菜植株的受力、转动角速度和运动时间等参数,为计算油菜植株铺放角提供依据。
2.2 铺放角及其影响因素分析
由油菜植株转动过程动力学分析可知,油菜在重力和牵连力1作用下转动,机组前进方向上在牵连力1和阻力2作用下做减速运动,设其当量加速度大小为a。定义铺放角为割倒的油菜植株主茎秆与机器前进方向在水平面内的后夹角,则油菜植株的理论铺放角t为

式中为割下部分的油菜植株高度,m。
将式(7)~(8)、式(10)、式(12)代入式(13),得到铺放角的理论计算公式为
式中为铺放角理论值t的正弦值,其表达式为

由式(15)可知,铺放角的影响因素包括割后的油菜植株高度、质量、转动惯量、牵连力1、阻力2、质心到底端的距离0等物料参数和机器前进速度v、横向输送链速度v、割茬高度等割晒机作业参数。
为研究油菜植株参数和割晒机参数对铺放角的影响规律,运用ANSYS和ADAMS软件进行油菜植株铺放过程的模拟仿真试验。根据研究结果选择适宜的割晒条件和割晒机的最佳作业参数,提高油菜割晒作业性能。
3 刚柔耦合模拟仿真试验
3.1 刚柔耦合多体动力学模型构建
为准确描述油菜植株的外形和力学特征,利用ANSYS软件构建油菜的柔性体力学模型并生成中间文件,在ProE软件中建立割晒机三维模型,将2个模型导入ADAMS中构建刚-柔耦合多体动力学仿真模型。
3.1.1 油菜植株柔性力学模型构建
根据文献[19-23]中油菜植株表型参数和机械物理特性,建立油菜植株的三维模型,由主茎秆和3个圆周方向均匀分布的分枝组成。以青油14号油菜为例,依据文献[24-25],油菜植株的力学参数为质量密度438 kg/m3、弹性模量1.34×1011Pa,泊松比0.3,选用Solid(Brick8node45)为材料单元,出于计算精度和时间的考虑,定义最小网格边长为2 mm对模型进行网格划分,生成73 275个网格,分别在植株底端和顶端创建2个连接点。利用ANSYS与ADAMS的接口Solve and create export file to ADAMS输出包含茎秆形态、力学特征等参数的柔性体模型并保存为.mnf文件。
3.1.2 刚柔耦合模型构建
在ProE中建立油菜割晒机的三维模型,经简化处理后导入ADAMS中,通过ADAMS的Flexible Bodies选项在指定目录下打开已生成的mnf文件,构建割晒机-油菜植株刚柔耦合模型。
3.1.3 定义约束、作用力和驱动
根据油菜割晒机工作的实际情况和铺放过程理论分析,在割晒机-油菜植株组成的刚柔耦合动力学仿真模型中依次定义约束、作用力和驱动。
1)在油菜植株与输送链之间添加Forces,接触类型为Flex Boby to Solid(柔性体与实体),根据油菜植株参数和文献[26-27],接触力参数设置为:Normal Force的类型选为impact,Stiffness定义为1.0E+5,Force Exponent定义为2.2,Damping定义为100,Penetration Depth定义为0.1。摩擦力Friction Force 选取为None。
2)牵连力1和阻力2影响因素较为复杂,仿真中定义阻力作为两者的合力,大小为植株质量和油菜植株与植株的摩擦系数v的乘积,即=v。
3)定义割台与地面沿机器前进方向为滑移副,并添加直线驱动;定义横向输送拨齿在输送链方向为滑移副,并添加直线驱动。
3.1.4 定义关键传感器
依据铺放过程分析,定义2个传感器模拟植株的运动过程。
1)油菜底端与地面位置传感器1:用于检测植株底端与地面的距离,检测值为0时通过脚本控制使该传感器失效,植株与地面发生碰撞,下落运动过程结束。
2)油菜顶端与地面位置传感器2:用于检测植株顶端与地面的距离,检测值为0时通过脚本控制使该传感器失效,植株铺放于地面上,转动过程结束。
3.1.5 仿真过程与后处理
在ADAMS中创建通过2个连接点的线段,根据铺放角的定义可知,线段与轴负方向的夹角即为铺放角,如图4所示。

注:A为油菜植株顶端连接点,B为油菜植株底端连接点。
由油菜植株运动过程分析可知,铺放角仿真值β的计算公式为
式中x为点在轴上的坐标;x为点在轴上的坐标;z为点在轴上的坐标;z为点在轴上的坐标。
创建Measure测量仿真过程中线段与轴负方向的夹角。设置仿真时间和步长,点击开始进行铺放过程仿真计算。仿真完成后进入ADAMS的Post process后处理模块提取仿真结果,绘制铺放角随时间的变化曲线,如图5所示。
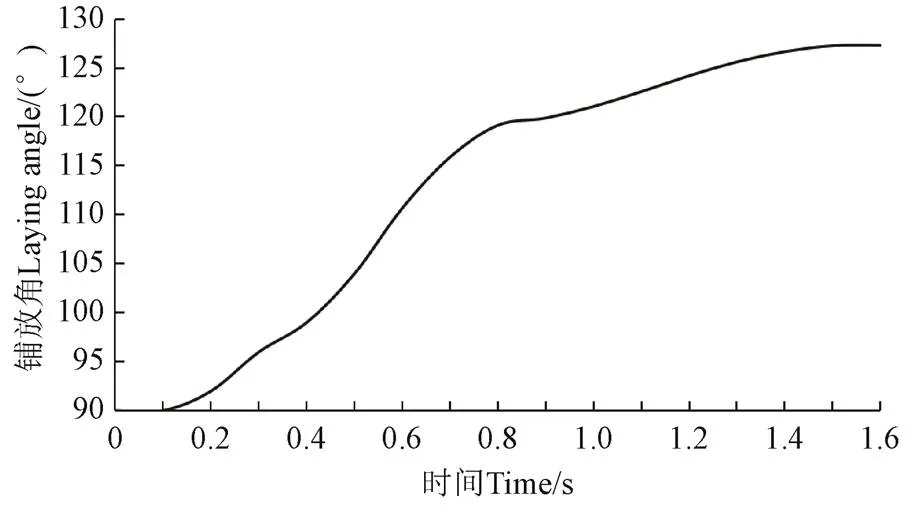
图5 铺放角随时间变化曲线
3.2 试验设计
3.2.1 单因素试验
为探究适合割晒的油菜植株参数,以油菜植株的物料参数为因素开展单因素试验,研究其对铺放角的影响规律。根据油菜割晒机的技术参数和行业标准JB/T 7733—2007《割晒机技术条件》,结合试验油菜植株特性,单因素试验作业参数设置为:前进速度0.8 m/s、横向输送链与前进速度的速比1.2、割茬高度0.4 m。
根据文献[28]和油菜植株参数实际测试结果,单因素试验的因素水平为:油菜植株高度1.2、1.3、1.4、1.5、1.6 m,油菜植株质量密度388、438、488、538、588 kg/m3,油菜植株与植株的摩擦系数0.1、0.2、0.3、0.4、0.5。
3.2.2 多因素参数优化试验
为研究割晒机作业参数对铺放角的影响规律并确定最优参数组合,根据理论分析和文献[16],以铺放角为响应值,以割晒机前进速度1、横向输送链与前进速度的速比(以下称“速比”)2和割茬高度3作为影响因子开展响应面试验。
根据Box-Behnken中心组合设计理论,以铺放角为响应值,以前进速度1、速比2和割茬高度3为因素开展响应面试验[29-31]。试验因素水平编码如表1所示。

表1 因素水平编码表
4 试验结果与分析
4.1 单因素试验结果与分析
4.1.1 油菜植株高度对铺放角的影响
图6为油菜植株高度对铺放角的影响曲线。由图6可知,油菜植株高度为1.2~1.4 m时,铺放角随植株高度的增加而减少,植株高度在1.4~1.6 m范围内铺放角随植株高度的增加而增加,植株高度为1.4 m时,铺放角取得最小值120.4°。

图6 油菜植株高度对铺放角的影响
4.1.2 油菜植株质量密度对铺放角的影响
图7为油菜植株质量密度对铺放角的影响曲线。由图7可知,油菜植株质量密度小于538 kg/m3时铺放角随质量密度增加而增加,质量密度继续增加时铺放角减小,植株质量密度为538 kg/m3时,铺放角取得最大值133.6°。
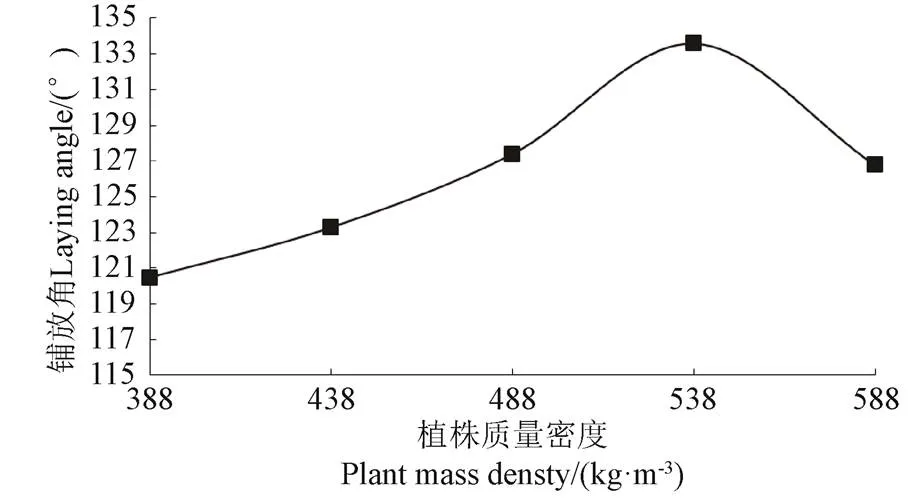
图7 油菜植株质量密度对铺放角的影响
4.1.3 油菜植株与植株的摩擦系数对铺放角的影响
图8为油菜植株与植株的摩擦系数对铺放角的影响曲线。由图8可知,油菜植株与植株的摩擦系数为0.1~0.5时,铺放角随油菜植株与植株的摩擦系数增加而减少,变化范围为117.6°~134.3°。

图8 油菜植株与植株的摩擦系数对铺放角的影响
单因素仿真试验结果表明,油菜植株高度为1.4 m时铺放角取得最小值120.4°,质量密度为538 kg/m3时铺放角取得最大值133.6°,油菜植株与植株的摩擦系数为0.5时铺放角取得最小值117.6°。
4.2 多因素响应面试验结果与分析
4.2.1 回归模型与显著性分析
多因素试验设计方案与结果如表2所示,利用 Design-Expert 软件[32-33]对试验结果进行显著性分析,结果如表3所示。
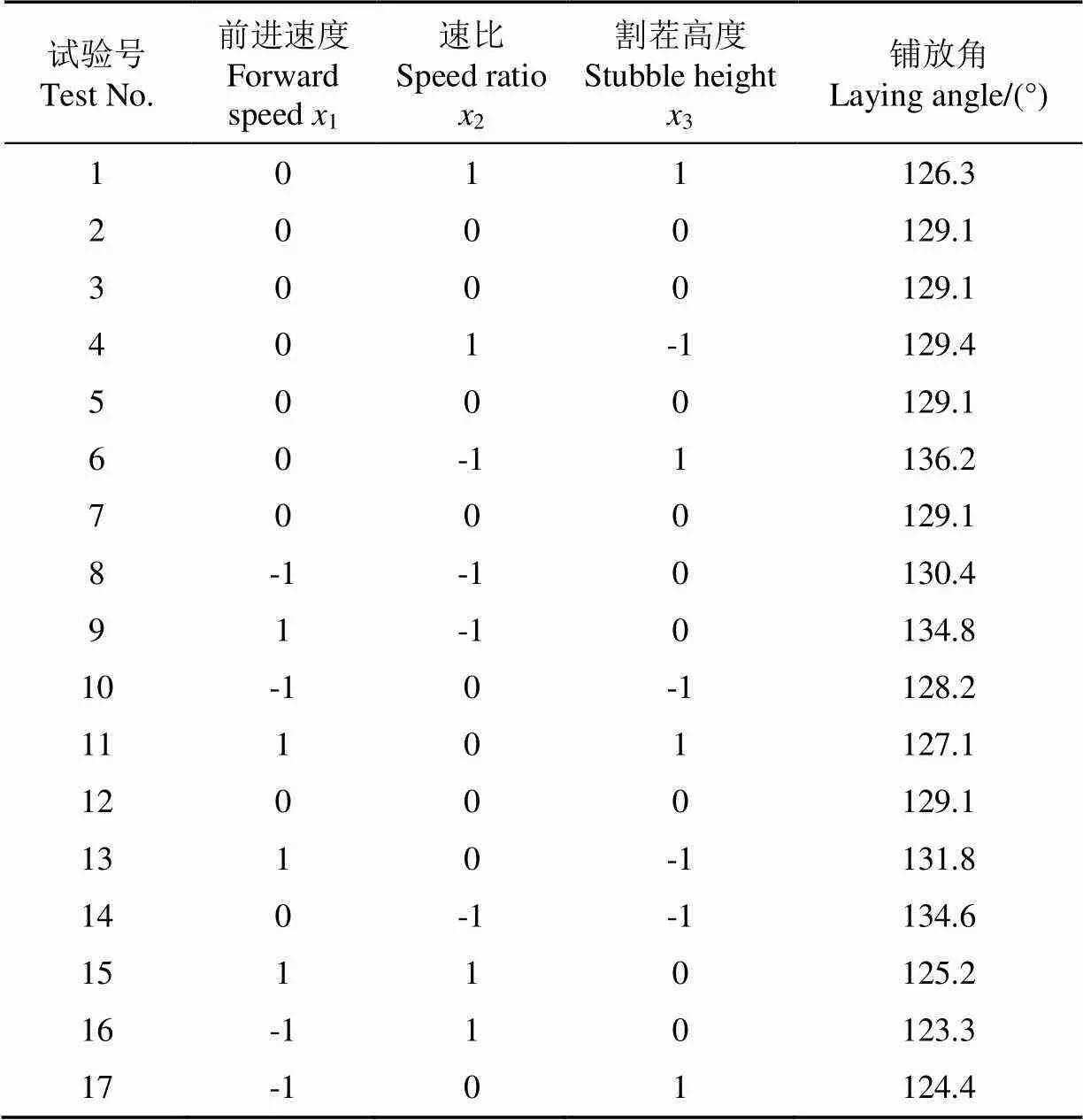
表2 多因素试验设计方案与结果
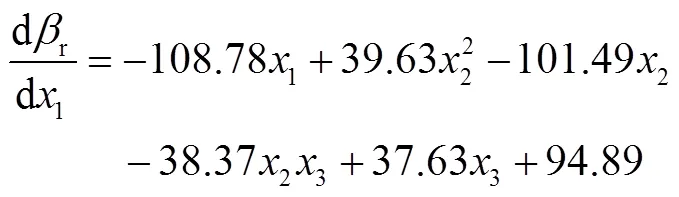
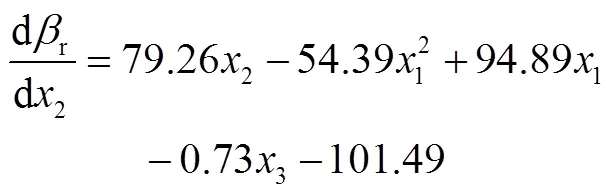
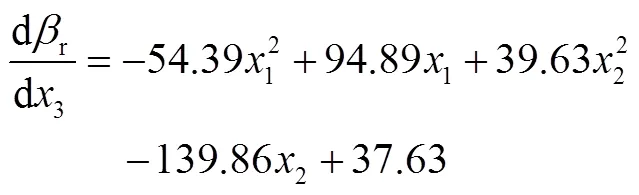
由表3方差分析结果可知,方程评价指标铺放角仿真值的值为0.000 2<0.01,表明回归模型极显著,其决定系数2值为0.97,表明模型与试验值拟合程度较好。其中,1、2、3、13、12的值小于0.01,说明对模型影响极为显著;12、13、32的值大于0. 05,说明对模型影响不显著,模型中可不予考虑。根据值可知各参数对分布变异系数由大到小顺序为:2、1、3,即速比、前进速度、割茬高度。去除不显著因素,可得铺放角的回归函数值r与前进速度1、速比2、割茬高度3的三元二次回归方程为

根据回归方程(16),分别对3个自变量求导可得
4.2.2 交互作用对铺放角影响分析
通过 Design-Expert 软件生成响应面曲线如图9,根据响应面分析前进速度、速比和割茬高度的交互因素对铺放角的影响。

表3 回归方程方差分析
注:< 0.01(极显著);0.01≤< 0.05(显著);≥0.05(不显著)。
Note:< 0.01(high significance);0.01≤< 0.05(significant);≥0.05(not significant)。

图9 交互作用对铺放角的影响
图9a为割茬高度位于中心水平(0.35 m)时,前进速度与速比对铺放角交互作用的响应面曲线。由图9a可知,前进速度增大时,铺放角先增大后减小,增加幅度先增大后减小;铺放角随速比的增加而减小,减小幅度较为平缓。在前进速度和速比对铺放角的交互作用中,前进速度对交互作用的影响较大。
图9b为速比位于中心水平(1.2)时,前进速度与割茬高度对铺放角交互作用的响应面曲线。由图9b可知,前进速度增大时,铺放角先增大后减小,增加幅度先增大后减小;割茬高度增加时,铺放角呈增加趋势,但增加幅度较小。在前进速度和割茬高度对铺放角的交互作用中,前进速度对交互作用的影响较大。
图9c为前进速度位于中心水平(0.8 m/s)时,速比与割茬高度对铺放角交互作用的响应面曲线。由图9c可知,速比增加时铺放角减小,减小幅度逐步变小;铺放角随割茬高度的增加而增加,增加幅度较为平缓。在速比和割茬高度对铺放角的交互作用中,速比对交互作用的影响较大。
4.2.3 参数优化
割晒机前进速度、速比和割茬高度及其交互作用对铺放角的影响规律各不相同,为了寻求油菜割晒机最佳工作参数组合,提高割晒作业性能,进行参数优化设计。
参考行业标准JB/T 7733—2007《割晒机技术条件》的技术要求,铺放角越接近90°越好,建立目标函数与各参数变量的约束条件如式(21)所示:
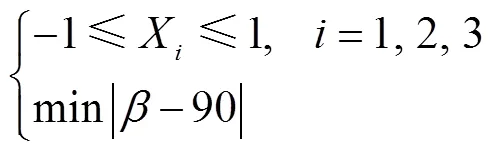
运用Design-Expert 中的Optimization模块对目标方程进行优化求解,得出割晒机的最优参数组合为:前进速度0.6 m/s,速比1.37,割茬高度0.42 m,此时的铺放角为122.6°。
4.3 田间试验
为验证模型预测的准确性和油菜割晒机最优参数组合条件下的作业性能,于2019年9月21日—23日在甘肃省张掖市民乐县进行田间性能试验。试验油菜品种为青油14号,种植方式为直播,油菜种植密度33 株/m2,植株平均高度1.6 m,底荚高度0.56 m,无倒伏,油菜籽粒及茎秆含水率分别为19.8%和58.9%,籽粒千粒质量3.74 g。
根据多因素响应面试验优化结果设置对照组T1与优化组T0,参考行业标准JB/T 7733—2007《割晒机技术条件》依据作业经验,对照组试验条件设定为:前进速度1.0 m/s、速比1.2、割茬高度0.5 m;根据参数优化结果优化组试验条件设置为:前进速度0.6 m/s、速比1.4、割茬高度0.4 m,选择地势平坦、油菜长势均匀、无杂草的田块,在风力不大于3 m/s的情况下开展油菜割晒作业,每次作业长度30 m,重复3次。
割晒作业完成后,参考标准JB/T 7733—2007《割晒机技术条件》和GB/T 8097—2008《收获机械联合收割机试验方法》测量割晒作业各项指标。具体测量方法为:将皮卷尺平行固定于铺放条上,每隔2 m选取1 m的测试区,利用角度尺测量测试区内油菜主茎秆与皮卷尺的夹角,利用钢卷尺测量油菜植株底端到皮卷尺的距离,记录数据并求平均值。则油菜植株铺放角为
式中β为每个测区内铺放角的平均值,(°)。
角度差为

式中为Δ角度差,(°);maxβ为每个测区内铺放角的最大值,(°);minβ为每个测区内铺放角的最小值,(°)。
根差为

式中为Δ根差,m;maxρ为测区内油菜植株底端到皮卷尺距离的最大值,m;minρ为测区内油菜植株底端到皮卷尺距离的最小值,m。
每隔2 m捡拾1.2 m×1 m面积内的落粒、掉穗,脱粒后称其籽粒质量,减去每平方米自然落粒得出每个测区内油菜割晒损失质量,则割晒损失率为

式中g为割晒损失率,%;w为每平方米内损失的籽粒质量,kg;为油菜产量,kg/hm2。
根据试验测试与计算,铺放角、角度差、根差和割晒损失率的试验结果见表4。
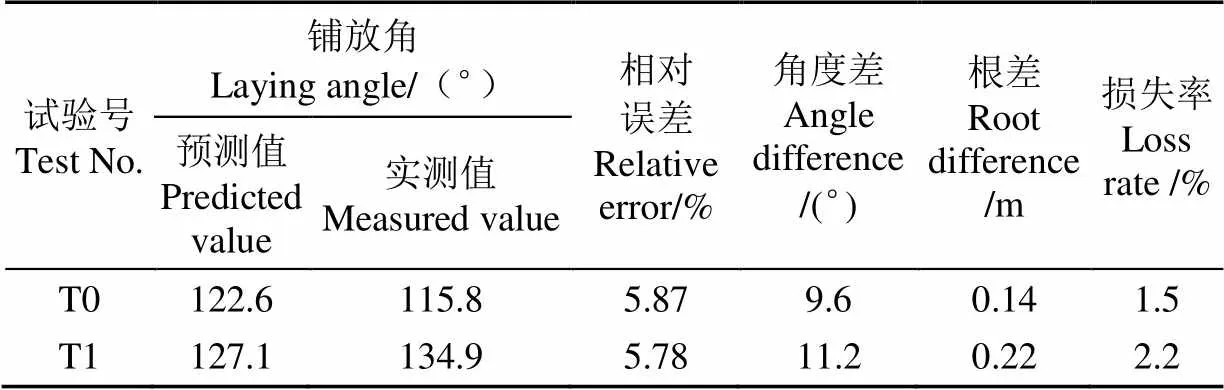
表4 田间试验结果
由表4可知,铺放角的预测值与实测值的相对误差小于6%,在参数优化组合条件下,铺放角由134.9°下降为115.8°,角度差由11.2°下降为9.6°,根差由0.22 m下降为0.14 m,损失率由2.2%下降为1.5%,说明优化参数组合可使铺放角更接近90°,同时降低了角度差、根差和损失率,有利于提高割晒作业质量。
试验油菜品种的分枝较多,结穗位置较高,植株重心偏上,割晒作业中油菜顶端前倾较大,导致铺放角偏大,但优化参数条件下的铺放角接近90°。实际割晒作业中,应根据植株高度和种植密度,调节割茬高度使割后植株高度接近1.4 m,种植密度较大时选用较小的前进速度和较大的速比,使铺放角接近90°,以提高油菜割晒作业质量。
5 结 论
1)阐述了立式油菜割晒机结构和工作原理,将铺放过程分为下落过程和转动过程,分析油菜植株在2个过程中的运动状态和受力情况,得出铺放角的函数模型并分析影响因素。
2)利用ANSYS软件和ProE软件分别建立油菜植株的柔性体和割晒机模型,导入ADAMS中建立割晒机-油菜植株刚柔耦合模型,分别开展单因素试验和多因素优化试验研究油菜植株参数和割晒机参数对铺放角的影响规律。
3)单因素试验结果表明,铺放角随油菜植株高度的增加先减小后增加,油菜植株质量密度增加时铺放角先增加后减小,铺放角随油菜植株与植株的摩擦系数增加而减少。多因素试验结果表明试验因素对铺放角影响显著性顺序大小为速比、前进速度、割茬高度;建立铺放角的三元二次回归模型,利用响应面法分析因素交互作用对铺放角的影响规律。
4)建立铺放角目标优化方程,得到割晒机优化参数组合:前进速度0.6 m/s,速比1.37,割茬高度0.42 m。田间试验结果表明,铺放角的预测值与实测值的相对误差小于6%,在优化参数组合条件下,铺放角由134.9°下降为115.8°,角度差由11.2°下降为9.6°,根差由0.22 m下降为0.14 m,损失率由2.2%下降为1.5%,说明优化参数组合可使铺放角更接近90°,同时降低角度差、根差和损失率,提高了割晒作业质量。
由于仿真精度和时间限制,本文将油菜植株的相互牵连力添加为定值作用力,导致铺放角预测值与实测值的相对误差接近6%。实际作业中牵连作用力受油菜品种、重叠系数、含水率、摩擦系数等多个因素影响是变化的,后续需研究油菜植株与植株的相互作用力在铺放过程中的变化及其对割晒作业质量的影响,进一步提高仿真结果的可靠性。
[1] 吴崇友,金诚谦,肖体琼,等. 我国油菜全程机械化现状与技术影响因素分析[J]. 农机化研究,2007,29(12):207-210. Wu Chongyou, Jin Chengqian, Xiao Tiqiong, et al. Analysis on rape mechanization present situation and technical affection factors in whole productive course in China[J]. Journal of Agricultural Mechanization Research, 2007, 29(12): 207-210. (in Chinese with English abstract)
[2] 吴崇友,易中懿. 我国油菜全程机械化技术路线的选择[J]. 中国农机化学报,2009,222(2):3-6. Wu Chongyou, Yi Zhongyi. Selection of technology route of oilseed rape mechanization in entire production proceeding in China[J]. Journal of Chinese Agricultural Mechanization, 2009, 222(2): 3-6. (in Chinese with English abstract)
[3] 金诚谦,吴崇友,石磊. 油菜生产全程机械化技术体系关键技术研究[J]. 农机化研究,2010,32(5):221-223. Jin Chengqian, Wu Chongyou, Shi Lei. Key technologies for the systems of rape mechanization in whole productive course[J]. Journal of Agricultural Mechanization Research, 2010, 32(5): 221-223. (in Chinese with English abstract)
[4] 罗海峰,汤楚宙,官春云,等. 油菜机械化收获研究进展[J]. 农机化研究,2015,37(1):1-8. Luo Haifeng, Tang Chuzhou, Guan Chunyun, et al. Research progress in rapeseed mechanized harvest[J]. Journal of Agricultural Mechanization Research, 2015, 37(1): 1-8. (in Chinese with English abstract)
[5] 吴崇友,王积军,廖庆喜,等. 油菜生产现状与问题分析[J]. 中国农机化学报,2017,38(1):124-131. Wu Chongyou, Wang Jijun, Liao Qingxi, et al. Current status and problems of rapeseed production[J]. Journal of Chinese Agricultural Mechanization, 2017, 38(1): 124-131. (in Chinese with English abstract)
[6] 陈红琳,陈尚洪,沈学善,等. 不同收获方式对油菜子粒损失、含油量及种植效益的影响[J]. 作物杂志,2015,30(5):74-79. Chen Honglin, Chen Shanghong, Shen Xueshan, et al. Effects of harvest methods on yield loss rate,oil content and planting efficiency for rape[J]. Crops, 2015, 30(5): 74-79. (in Chinese with English abstract)
[7] 石增祥,吴明亮,杨文敏,等. 我国油菜分段收获机械研究现状与发展对策[J].农业工程,2015,5(5):1-4. Shi Zengxiang, Wu Mingliang, Yang Wenmin, et al. Research status and development measures of rape segment harvester in China[J].Agricultural Engineering, 2015, 5(5): 1-4.(in Chinese with English abstract)
[8] 吴崇友,丁为民,石磊,等.油菜分段收获捡拾脱粒机捡拾损失响应面分析[J].农业机械学报,2011,42(8):89-93. Wu Chongyou, Ding Weimin, Shi Lei, et al. Response surface analysis of pickup losses in two-stage harvesting for rapeseed[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(8): 89-93. (in Chinese with English abstract)
[9] 吴崇友,肖圣元,金梅. 油菜联合收获与分段收获效果比较[J]. 农业工程学报,2014,30(17):10-16. Wu Chongyou, Xiao Shengyuan, Jin Mei. Comparation on rape combine harvesting and two-stage harvesting[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(17): 10-16. (in Chinese with English abstract)
[10] 金诚谦,尹文庆,吴崇友. 油菜割晒机拨指输送链式输送装置研制与试验[J]. 农业工程学报,2013,29(21):11-18. Jin Chengqian, Yin Wenqing, Wu Chongyou. Development and experiment of rape windrower transportation device with poke finger conveyor chain[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(21): 11-18. (in Chinese with English abstract)
[11] 李平,廖庆喜,李磊,等. 4SY-1.8改进型油菜割晒机主要装置设计与试验[J]. 农业机械学报,2014,45(1):53-58. Li Ping, Liao Qingxi, Li Lei, et al. Design and experiment of the main device of 4SY-1.8 modified rape windrower[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(1): 53-58. (in Chinese with English abstract)
[12] 李平,廖庆喜,舒彩霞,等. 油菜割晒机茎秆铺放质量的故障成因分析与参数匹配研究[J]. 应用基础与工程科学学报,2016,24(1):197-209. Li Ping, Liao Qingxi, Shu Caixia, et al. Fault analysis of stem windrowing quality and parameters match on the rape windrower[J]. Journal of Basic Science and Engineering, 2016, 24(1): 197-209. (in Chinese with English abstract)
[13] 金诚谦,吴崇友,金梅,等. 4SY-2 型油菜割晒机设计与试验[J]. 农业机械学报,2010,41(10):76-79. Jin Chengqian, Wu Chongyou, Jin Mei, et al. Design and experiment of 4SY-2 rape windrower[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(10): 76-79.(in Chinese with English abstract)
[14] 金诚谦,尹文庆,吴崇友.4SY–2型油菜割晒机铺放质量数学模型与影响因素分析[J].农业工程学报,2012,28(2):45-48. Jin Chengqian, Yin Wenqing, Wu Chongyou. Mathematical model and influencing factors analysis for windrow quality of 4SY-2 rape windrower[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(2): 45-48. (in Chinese with English abstract)
[15] 石增祥,谢伟,任述光,等. 4SY-2.2型油菜割晒机设计与试验[J]. 中国农学通报,2017,33(10):140-145. Shi Zengxiang, Xie Wei, Ren Shuguang, et al. Design and test of 4SY-2.2 rape windrower[J]. Chinese Agricultural Science Bulletin, 2017, 33(10): 140-145. (in Chinese with English abstract)
[16] 王修善,刘大为,李旭,等. 4SY–2. 0 型自走式油菜割晒机的设计与试验[J]. 湖南农业大学学报:自然科学版,2016,42(4):445-453. Wang Xiushan, Liu Dawei, Li Xu, et al. Design and experiment of 4SY-2.0 self-propelled rape windrower[J]. Journal of Hunan Agricultural University: Natural Sciences, 2016, 42(4): 445-453. (in Chinese with English abstract)
[17] 贺俊林,胡伟,郭玉富,等. 扶禾杆在不对行导入玉米茎秆中的运动仿真[J]. 农业工程学报,2007,23(6):125-129. He Junlin, Hu Wei, Guo Yufu, et al. Kinematic simulation of no-row feed-in mechanism with guide-rod for corn harvester[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2007, 23(6): 125-129. (in Chinese with English abstract)
[18] 杜岳峰,毛恩荣,宋正河,等. 基于ADAMS的玉米植株收获过程仿真[J]. 农业机械学报,2012,43(S):106-111. Du Yuefeng, Mao Enrong, Song Zhenghe, et al. Simulation on corn plants in harvesting process based on ADAMS[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(S): 106-111. (in Chinese with English abstract).
[19] 罗海峰,汤楚宙,官春云,等. 适应机械化收获的田间油菜植株特性研究[J]. 农业工程学报,2010,26(S1):61-66. Luo Haifeng, Tang Chuzhou, Guan Chunyun, et al. Plant characteristic research on field rape based on mechanized harvesting adaptability[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(S1): 61-66. (in Chinese with English abstract)
[20] 董晓芳,田保明,姚永芳,等. 密度对油菜品种机械化收获特性的影响[J]. 中国农学通报,2012,28(3):71-74. Dong Xiaofang, Tian Baoming, Yao Yongfang, et al. Effects of the density on the characteristics of the mechanization harvest in brassica napus L.[J]. Chinese Agricultural Science Bulletin, 2012, 28(3): 71-74. (in Chinese with English abstract)
[21] 罗海峰,吴明亮,翁伟,等. 成熟期油菜茎秆物理模型试验研究[J]. 湖南农业大学学报,2013,39(S1):88-89,93. Luo Haifeng, Wu Mingliang, Weng Wei, et al. Experimental study on physical model of rape stem at mature stage[J]. Journal of Hunan Agricultural University, 2013, 39(S1): 88-89, 93. (in Chinese with English abstract)
[22] 金鑫. 4SY-1.8型油菜割晒机输送系统的研制[D]. 武汉:华中农业大学,2012. Jin Xin. Design on Conveying System of 4SY-1.8 Rape Windrower[D]. Wuhan: Huazhong Agricultural University, 2012. (in Chinese with English abstract)
[23] 李平. 4SY-1.8型油菜割晒机关键部件工作机理与试验研究[D]. 武汉:华中农业大学,2014. Li Ping. Experimental Study and Working Mechanism of Key Parts for 4SY-1.8 Rape Windrower[D]. Wuhan: Huazhong Agricultural University, 2014. (in Chinese with English abstract)
[24] 吴明亮,官春云,汤楚宙,等. 油菜茎秆切割力影响因素试验[J]. 农业工程学报,2009,25(6):141-144. Wu Mingliang, Guan Chunyun, Tang Chuzhou, et al. Experiments on influencing factors of cutting force of rape stem[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2009, 25(6): 141-144. (in Chinese with English abstract).
[25] 伍文杰,吴崇友,江涛. 油菜茎秆切割试验研究验[J]. 农机化研究,2018,40(6):141-144. Wu Wenjie, Wu Chongyou, Jiang Tao. Experimental study on cutting of rape salks[J]. Journal of Agricultural Mechanization Research, 2018, 40(6): 141-144. (in Chinese with English abstract).
[26] 崔涛,刘佳,张东兴,等. 基于ANSYS和ADAMS的玉米茎秆柔性体仿真[J]. 农业机械学报,2012,43(S):112-115. Cui Tao, Liu Jia, Zhang Dongxing, et al. Flexible body simulation for corn stem based on ANSYS and ADAMS[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(S): 112-115. (in Chinese with English abstract).
[27] 宗望远,廖庆喜,黄鹏,等. 组合式油菜脱粒装置设计与物料运动轨迹分析[J]. 农业机械学报,2013,44(S2):41-46. Zong Wangyuan, Liao Qingxi, Huang Peng, et al. Design of combined rape threshing device and analysis of rape cane movement trail[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(S2): 41-46. (in Chinese with English abstract).
[28] 冉军辉,沐森林,李海同,等. 油菜联合收获机往复式双动割刀行星轮驱动器设计与试验[J]. 农业工程学报,2020,36(9):17-25. Ran Junhui, Mu Senlin, Li Haitong, et al. Design and test of planet gear driver of reciprocating double-acting cutter for rapeseed combine harvester[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(9): 17-25. (in Chinese with English abstract)
[29] 施丽莉,胡志超,顾峰玮,等. 耙齿式垄作花生残膜回收机设计及参数优化[J]. 农业工程学报,2017,33(2):8-15. Shi Lili, Hu Zhichao, Gu Fengwei, et al. Design and parameter optimization on teeth residue plastic film collector of ridged peanut[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(2): 8-15. (in Chinese with English abstract)
[30] 谢建华,唐炜,张学军,等. 摆杆驱动式残膜回收机的设计与参数优化[J]. 农业工程学报,2019,35(4):56-63. Xie Jianhua, Tang Wei, Zhang Xuejun, et al. Design and parameter optimization of swing rod driven residual plastic film collector[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(4): 56-63. (in Chinese with English abstract)
[31] 杨风波,薛新宇,蔡晨,等. 航空专用离心喷头雾化性能试验与影响因子研究[J]. 农业机械学报,2019,50(9): 96-104. Yang Fengbo, Xue Xinyu, Cai Chen, et al. Atomization performance test and influence factors of aviation special centrifugal nozzle[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(9): 96-104.(in Chinese with English abstract)
[32] 张佳喜,汪珽珏,陈明江,等. 齿盘式棉秆收获机的设计[J]. 农业工程学报,2019,35(15):1-8. Zhang Jiaxi, Wang Tingjue, Chen Mingjiang, et al. Design of toothed disc cotton stalk harvester[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(15): 1-8. (in Chinese with English abstract)
[33] 沈公威,王公仆,胡良龙,等. 甘薯茎尖收获机研制[J]. 农业工程学报,2019,35(19):46-55. Shen Gongwei, Wang Gongpu, Hu Lianglong, et al. Development of harvesting mechanism for stem tips of sweet potatoes[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(19): 46-55. (in Chinese with English abstract)
Formation mechanism of laying angle of vertical rape windrower based on ANSYS-ADAMS
Li Haitong, Wu Chongyou※, Mu Senlin, Guan Zhuohuai, Jiang Tao
(,,210014,)
In order to improve the operation quality of vertical rape windrower, the effects of rape plant characteristics and windrower parameters on laying angle were studied in this study. The structure and working principle of the vertical rape mower were described. The laying process of rape plant was divided into falling process and rotation process according to the working principle of the rape windrower. The movement state of rape plant during the laying process was analyzed based on the dynamic theory, and the mathematical model of laying angle was established and the influencing factors were analyzed. Analysis results showed that the laying angle influenced by material parameters of rape plant and working parameters of windrower. ANSYS and ProE software were used to establish the flexible body of rape plant and windrower model, respectively. Then the rigid flexible coupling model of windrower and rape plant was established in ADAMS software, and the single factor and multifactor simulation experiments of laying process were carried out. The results of single factor experiments showed that with the increasing of the plant height in the range of 1.2-1.6 m, laying angle decreased and reached the minimum value at the plant height of 1.4m, and then increased. The laying angle increased and then decreased when the plant mass density was in the range of 438-588 kg/m3, and reached the maximum value at the plant mass density of 538 kg/m3. When the friction coefficient between plants increased in the range of 0.1-0.5, the laying angle decreased. The results of multifactor experiments showed that forward speed, speed ratio and the interaction between forward speed and stubble height had a significant influence on laying angle (< 0.01).The significant order of factors was speed ratio, forward speed and stubble height. The quadratic regression equation model was established according to the results of multifactor experiments, and the response surface methodology was utilized to analyze the influence of interaction on the laying angle. Optimization equations and constraints were established, and optimal parameters of windrower were determined that forward speed was 0.6 m/s, the speed ratio was 1.37, and stubble height was 0.42 m. The field experiments were carried out and the results indicated that the relative errors between predicted and measured values of laying angle were less than 6%。Compared with the control tests, the laying angle of rape plant decreased from 134.9° to 115.8°, the angle difference decreased from 11.2°to 9.6°, the root difference decreased from 0.22 m to 0.14 m, and the loss rate decreased from 2.2% to 1.5%, the working performance of rape windrower improved. The research results can provide the basis for determining the suitable conditions of rape cutting and optimizing the operation parameters of the windrower.
agricultural machinery; harvesting; rape; laying angle; rigid-flexible coupling model; response surface; optimization
李海同,吴崇友,沐森林,等. 基于ANSYS-ADAMS的立式油菜割晒机铺放角形成机理 [J]. 农业工程学报,2020,36(14):96-105.doi:10.11975/j.issn.1002-6819.2020.14.012 http://www.tcsae.org
Li Haitong, Wu Chongyou, Mu Senlin, et al. Formation mechanism of laying angle of vertical rape windrower based on ANSYS-ADAMS[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(14): 96-105. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.14.012 http://www.tcsae.org
2020-04-20
2020-06-24
国家重点研发计划项目(2016YFD0702101);国家油菜产业体系专项资助项目(CARS-13-10B)
李海同,博士,助理研究员,主要从事收获机械研究。Email:lhtdolphin@163.com
吴崇友,博士,研究员,博士生导师,主要从事收获机械研究研发。Email:542681935@qq.com
10.11975/j.issn.1002-6819.2020.14.012
S225.2
A
1002-6819(2020)-14-0096-10