基于LBP 与SVM 的马铃薯芽眼识别
2020-09-18张金敏杨添玺
张金敏,杨添玺
兰州交通大学,甘肃 兰州 730070
马铃薯具有营养价值高、适应力强、产量大等优点,是全球第三大重要的粮食作物。农业生产中使用种薯块茎进行种植,根据芽眼对块茎切块,促进块茎内外氧气交换,破除休眠,经过切块催芽使植株发芽率大大提高。通过查阅资料及实地勘察发现,目前马铃薯种植机械化生产水平有了明显的提高,走“机械残膜捡拾—机械深松、旋耕整地—机械铺膜半膜垄作植物—机械培土中耕—机械统防统治—机械开挖收获(连同地膜一同回收)”的马铃薯机械化生产路子[1]。在种植过程中,往往为了节省成本及高出苗率,种薯需要根据芽眼进行切块,这一环节由人工进行。
芽眼识别是种薯智能切块的先决条件,现有研究多是基于机器视觉对马铃薯进行质量检测,NOORDAM[2]设计了马铃薯检测分级的机器视觉系统,每秒可以处理50 张图像;汪成龙[3]等研究了优于传统算法的在复杂图像背景中分割出马铃薯区域的分割算法;孔彦龙[4]等提取马铃薯俯视图面积和侧视图周长参数,通过线性回归分析建立了马铃薯的质量监测模型,实现了马铃薯质量分选;周竹[5]等提出最小外接柱体对马铃薯立体信息进行描述;赫敏[6]将马铃薯自然放置后从顶部拍摄俯视图像,再旋转90°拍摄侧面图像,根据这两张图像建立了马铃薯单薯质量线性回归分析预测模型;ZHOU[7]等将普通平面镜之间的夹角设置为65°的V 型置于马铃薯两边,摄像头可以一次获得马铃薯的三面投影,进而对马铃薯质量进行估计,给出质量预测模型。当前对于芽眼识别的研究较少,邢作常[8]等提出根据种薯质心和薯芽质心的质心连线对种薯切块,对基于机器视觉的种薯自动切块机进行设计。田海韬[9]结合彩色空间及灰度空间对马铃薯芽眼进行了识别,得到了较好地效果。
基于上文分析,本文提出使用局部二值模式(Local Binary Patterns,LBP)结合支持向量机(Support Vector Machine,SVM)对马铃薯芽眼进行识别。具体操作如下:首先应用摄像头采集不同种薯图像,接着将预先采集的图像预处理后,使用LBP 提取特征,最终由SVM 训练、测试,对种薯芽眼进行识别,经实验分析可得,识别率达到了预期水平,为后续种薯智能切块机的设计提供了先决条件。
1 材料与方法
1.1 实验材料
实验采用32 W,6500 K 色温环形灯管作为补偿光源,选取工业相机(WP-UC500)进行图像采集,当前基于机器视觉对马铃薯质量的识别多是针对如图1(a)、1(b)较为新鲜种薯进行识别,本实验增加对如图1(c)、1(d)较为陈旧种薯的识别工作。

图1 部分种薯采集图像Fig.1 Image of partial potato collection
获取图1 所示的四张图像,图(a)、图(b)是新鲜种薯,图(c)、图(d)是时间较长的种薯。
1.2 实验步骤
研究前对种薯芽眼进行观察及分析。如图1 所示,不同时期的种薯芽眼大小、深浅、颜色是有显著差异的;非芽眼区域的颜色纹理特征也有很大的不同,基于此拟采用LBP 与SVM 对种薯芽眼进行识别;芽眼识别分为训练阶段和识别阶段,训练阶段进行样本收集、特征提取、训练分类等步骤,最终得到训练参数。样本收集包含了对种薯芽眼部位及非芽眼部位的收集;定位阶段主要包括加载参数、灰度图像预处理、多尺度滑动窗口扫描、候选窗口合并等步骤。种薯芽眼识别流程如图2 所示,在进行图像分割后需要分别对种薯芽眼和非芽眼区域进行LBP 特征提取。

图2 马铃薯芽眼识别流程图Fig.2 Flowchart of potato bud eye recognition
1.3 中值滤波处理
在图像采集过程中难免有噪声干扰,需要进行去噪处理。常见的去噪方法有均值滤波、中值滤波和高斯滤波,因为中值滤波较其他两种滤波方法能够对图像边界进行更很好地保护,保持图像的清晰度,因此本实验选取中值滤波对种薯图像进行预处理。
1.4 OTSU 分割
在对图像进行滤波处理后把种薯从背景中分离出来,本文采用大津法(OTSU 法)基本原理:所选取的分割阈值使得目标及背景的灰度分布方差越大,就会得到越好分割效果。目标与背景灰度分布方差公式如下:g=θ1(μ1-μ)2+θ2(μ2-μ)2(1)
式(1)中θ1表示目标区域与整个图像面积的比例,μ1则表示目标区域平均灰度值,θ2表示背景区域与整个图像面积的比例,μ2则为背景区域平均灰度值。分割阈值设为e,从最小灰度值0 到最大灰度值255,使得g取最大值,e则为最佳阈值。
1.5 LBP
LBP 最早是作为一种有效的纹理描述算子提出的,因其对图像局部纹理特征的卓越描绘能力而获得了十分广泛的应用。LBP 特征具有很强的分类能力(Highly Discriminative)、较高的计算效率并且对于单调的灰度变化具有不变性[9]。
LBP 基本原理是将一个像素视为中心点,它的值以该点与其邻域3×3 像素的相对灰度值作为响应,通过比对周围邻域的像素点值计算得到。最原始的LBP 计算公式描述如下:

其中,gc表示该中心点像素的灰度值,gi表示该点邻域像素点的灰度值。P代表总的邻域像素点的个数,R表示邻域的半径。通过该中心像素点和其邻域像素的欧氏距离计算得到。
1.6 SVM 分类器
SVM 是在统计学习理论的基础上发展起来的新一代学习算法,它在文本分类、手写识别、图像分类、生物信息学等领域中获得较好的应用。相比于容易过度拟合训练样本的人工神经网络,支持向量机对于未见过的测试样本具有更好的推广能力(Generalization Ability)[11]。其基本原理是将低维空间的数据样本映射到高维空间中,使得数据样本线性可分,进而对边界进行线性划分,图4 为SVM 线性划分的基本原理。

图3 基本LBP 算子Fig.3 Basic LBP operator

图4 SVM 分类原理图Fig.4 SVM classification schematic diagram

通过对(4)中的每一个约束条件乘上一个拉格朗日乘数αi,可将此条件极值问题转化为下面的

通过数学方法可得:

此时的约束条件为:αi≥ 0并且
通过优化技术对α求解之后,最大余地地分割超平面的参数。
根据优化解的性质,解α必须满足

求出各个系数对应的最优解后,得到如下最优分类函数:

2 结果分析
2.1 图像预处理
首先选取中值滤波,对图像进行处理,处理结果如图5-a-d,可以看出中值滤波对种薯的边界有很好的保护;OTSU 分割结果如图5-e-h,再分别对图像做“或”运算,得出如图5-i-l 所示的种薯区域。
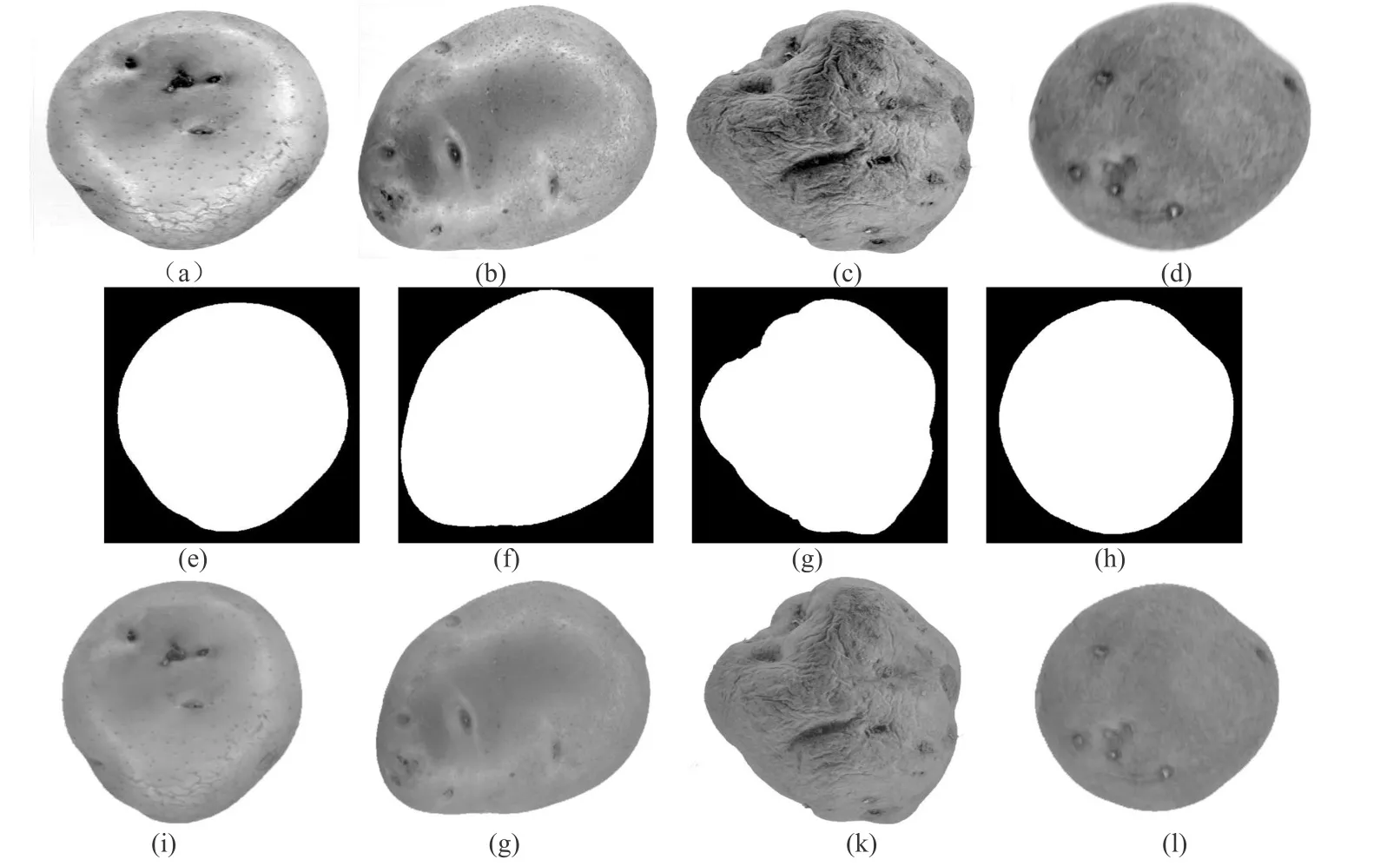
图5 种薯图像的分割Fig.5 Segmentation of seed potato image
2.2 LBP 直方图
实验对新种薯及旧种薯进行芽眼识别,分别对两种种薯的芽眼和非芽眼部位LBP 特征进行提取。
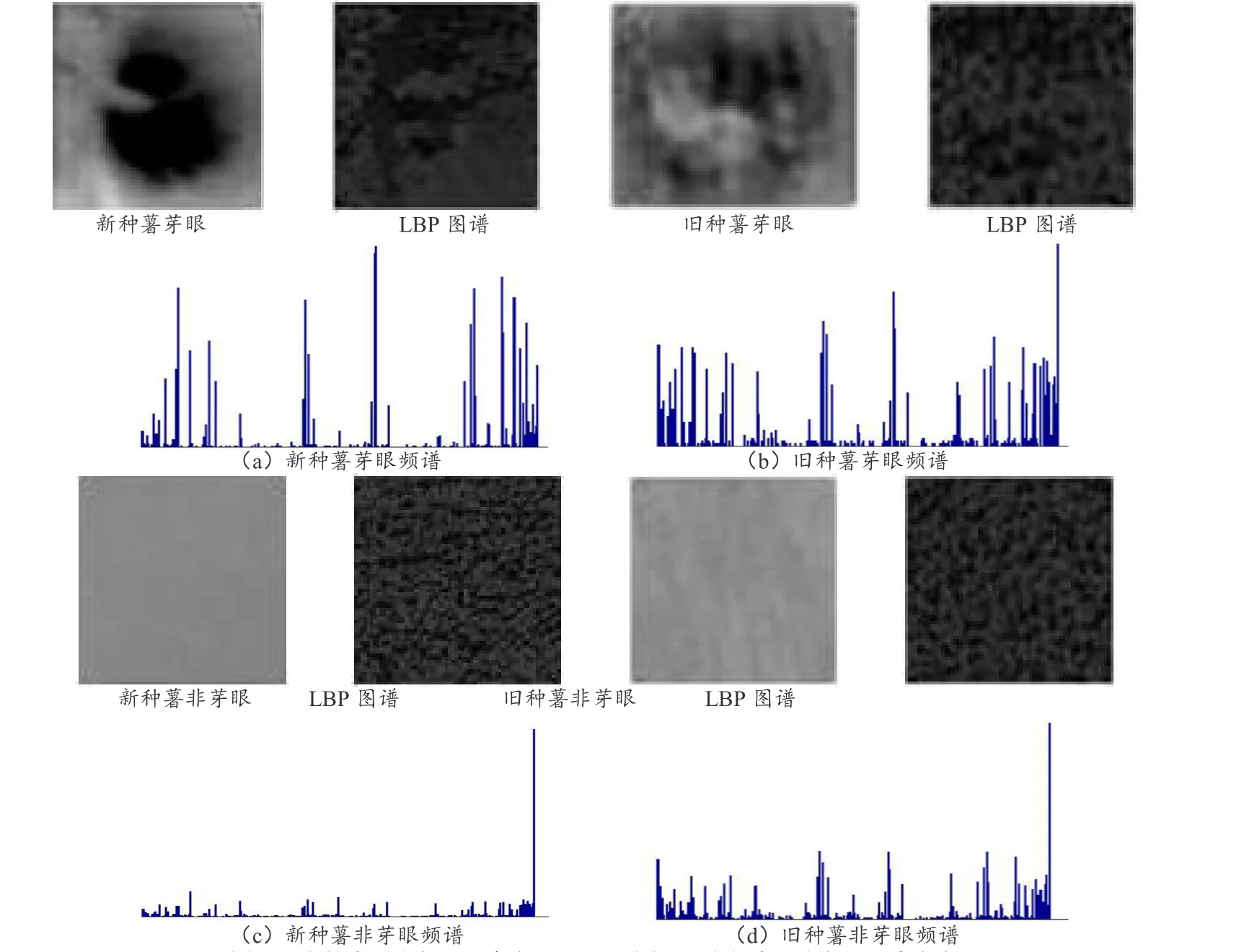
图6 种薯表面图像样本的LBP 频谱Fig.6 LBP spectrum of seed potato surface image sample
在种植过程中,规模化种植所采用的种薯都是专门培育,而普通小规模种植都是由前一年收获的马铃薯作为种薯,因此分别对新旧种薯芽眼进行识别。图6 是新旧种薯芽眼、非芽眼表面图像以及LBP 频谱,通过对比图6 当中的(a)、(b)、(c)及(d),芽眼的频谱幅值普遍较高,分布不均匀;而非芽眼部位的频谱幅值较低,分布较为均匀;在对新旧种薯芽眼频谱进行比较时会发现有一定差异,新种薯芽眼频谱分布不均匀而旧种薯的芽眼频谱较为均匀;新旧种薯非芽眼部位频谱则都比较均匀,相比之下,旧种薯非芽眼部位的幅值较高。
3 结论
为了验证LBP 结合SVM 对种薯芽眼识别的可靠性,通过采集大量种薯图片进行试验。实验环境为:Windows 操作系统和Matlab2014a 操作平台。
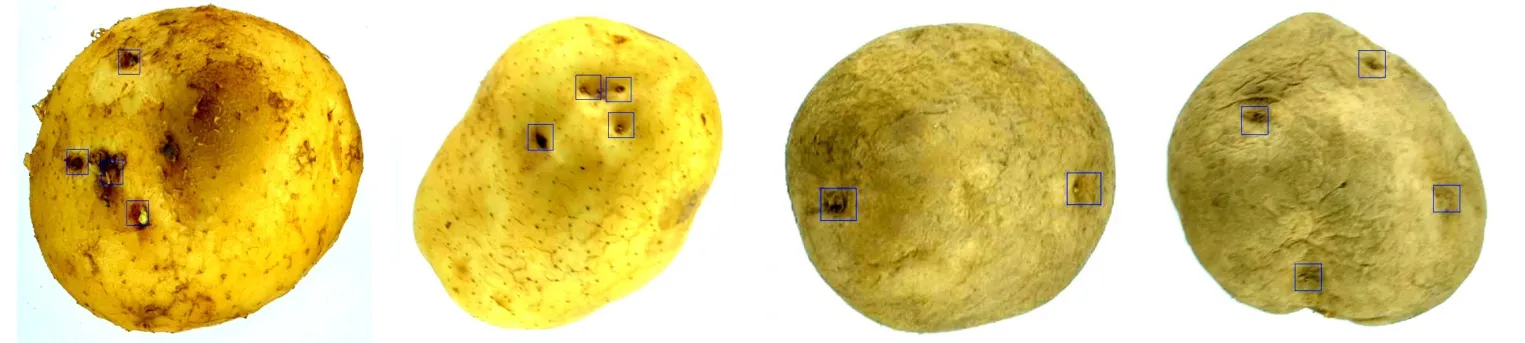
图7 检测结果图Fig.7 Test result diagram

表1 种薯芽眼识别率Table 1 Eye recognition rate of seed potato bud
当下基于机器视觉的马铃薯检测多是对马铃薯质量进行分级,而本文则是对种薯芽眼进行识别,相较于前文优点在于:一方面所用方法使得新种薯芽眼识别率达到97.61%,旧种薯芽眼识别率达到97.05%,综合识别率97.33%,相比于田海韬[9]96%的识别率,提高1.33 个百分点;另一方面增加对不同时间段的新旧种薯进行研究,拓宽了可识别种薯的范围,使得应用更为广泛,为种薯智能切块机的设计奠定基础。
