基于泛在信号融合的室内外场景鲁棒感知算法
2020-09-18鄢松吴飞朱海陆雯霞胡锐聂大惟
鄢松,吴飞,朱海,陆雯霞,胡锐,聂大惟
(上海工程技术大学 电子电气工程学院,上海 201620)
0 引 言
随着基于位置服务应用的不断发展,导航应用不再局限于单一的室内或室外定位服务,而对于各种复杂场景中的位置服务也成为当前的研究热点,尤其是在室内与室外环境相结合的无缝定位导航应用场景中,需要准确地识别用户所处的室内外环境,然后进行室内或室外定位方法的无缝切换定位.因此,根据用户所处的环境进行准确感知对实现室内外无缝切换定位技术具有重要意义.
根据用户所处环境信息进行室内外场景的准确感知对基于室内外场景感知的位置服务应用具有重要意义.目前对于室内外环境的识别已有多种研究,这些研究主要利用WiFi、全球卫星导航系统(GNSS)、地磁、蓝牙、声音、人的日常行为活动和移动通信基站信号等进行场景感知.
其中,对于WiFi信号,有单纯依赖WiFi[1-4]的室内外环境识别的研究,但由于WiFi信号本身易受环境中多径效应的影响而波动变化,从而造成室内外环境识别准确率低,识别不稳定;为了弥补只依赖WiFi信号进行室内外环境识别的缺陷,有研究者提出WiFi结合光照强度与人行为活动[5]以及WiFi结合GPS和惯性导航[6]的研究方法,均比只依赖WiFi的室内外环境识别方法有所改善.
对于利用GNSS信号进行室内外环境识别目前主要有三种研究思路:1)利用GNSS阈值进行判断识别[7-8],但GNSS信号容易受复杂室内结构影响而不稳定会带来很大误差;2)分析GNSS的信号特征[9-11];3)GNSS信号与其它环境信号结合,例如GNSS结合光照强度和地磁[12],GNSS与室内外温度[13]结合.
对于利用地磁信号[14],主要是通过室内外地磁强度以及地磁变化的特征来进行室内外环境判别,但在复杂室内环境条件下,地磁极易受室内电气设备等干扰而发生变化为识别带来误差.
对于其他研究方法,文献[15]通过蓝牙与GPS以及WiFi进行结合,有效提高了室内外环境识别准确率;文献[16]利用扬声器产生特殊的声音信号,即线性调频信号,再利用手机麦克风进行采集分析实现室内和室外环境的分类;文献[17]则是通过分析人的6种常见的日常行为活动在室内和室外环境中的差异来进行区分;文献[18-19]对室内外环境中存在的移动通信基站信号进行采集,然后利用机器学习或深度学习方法得到最优的室内外分类模型.
针对基于位置服务的应用需求日益增多,尤其是室内外无缝定位场景下的位置服务需求的增多,同时为解决现有研究方法的室内外场景感知稳定性较低、准确率不高问题,本文首先对室内外环境中泛在信号的变化趋势进行分析,然后提出一种基于泛在信号融合的室内外场景鲁棒感知算法,并利用室内外场景中的4种泛在信号进行组合对比试验,进而分析出本文算法当采用WiFi信号、GNSS信号以及光照强度这三种泛在信号融合进行室内外场景感知时性能最佳;最后,为了验证本文算法的鲁棒性,通过采集室内外多个不同角度方向上的泛在信号数据作为测试数据集对本文算法性能进行测试,测试结果表明本文算法有效地提高了室内外环境感知的准确率和鲁棒性;与其他研究方法对比,本文算法性能有较大提升.
1 相关研究方法原理
1.1 传统的AdaBoost算法
传统的AdaBoost算法的核心思想是针对同一个数据集,通过每次迭代修改数据分布的权重,进而训练得到多个弱分类器后进行组合得到一个强分类器.在算法迭代过程当中,会根据每个样本的分类正确性以及上次迭代后总体分类结果的权重,来确定当前每个样本的权值,然后将修改过权值分布的数据集进行下次迭代,最后将每次迭代生成的弱分类器通过对应的权重进行线性组合形成一个强决策分类器.
传统的AdaBoost算法步骤如下:
1) 初始化k个样本权值分布,每个样本权值为1/k,训练样本的初始权值分布为

i=1,2,…,k.
(1)
式中:D1为训练样本的初始权值分布;w1,i为第1次迭代第i个训练样本的初始权值.
2) 由带权值分布Dm(m=1,2,3,…,N)的训练样本集x进行学习得到一个弱分类器为
Gm(x):x→{-1,+1}.
(2)
式中,m为迭代次数.
3) 计算每个弱分类器的误差率

(3)
式中:wm,i为第m次迭代第i个训练样本的权值;I为指示函数;xi为第i个训练样本向量;yi为第i个训练样本对应的类别标签.
4) 计算每个弱分类器Gm(x)的权重为
(4)
5) 更新样本权值分布,
Dm+1=(wm+1,1,wm+1,2,…,wm+1,k),
(5)
其中,
i=1,2,…,k.
(6)
归一化因子:

(7)
6) 若未达到迭代次数N,则返回步骤2)继续迭代,直至迭代得到N个弱分类器.
7) 由N个弱分类器组合得到一个强分类器
(8)
1.2 PNN
概率神经网络(PNN)是一种基于贝叶斯最小风险准则的结构简单且应用广泛的神经网络,学习速度快,分类能力强,容错性好[20].PNN主要分为四层,分别为输入层(Input)、模式层(Pattern)、求和层(Summation)和输出层(Output),PNN模型如图1所示.

图1 PNN模型
1) 输入层
将样本的特征向量传入网络,输入层神经元个数与输入样本特征向量的维度相同.
2) 模式层
计算输入的特征向量与中心距离,然后通过高斯函数得到模式层输出,模式层中的第i类模式的j神经元确定的输入和输出关系为

(9)
式中:x为输入的样本向量;xij为第i种模式的第j个样本;σ为网络的平滑因子;d为输入向量的维度;φij(x)为输入样本在第i种模式第j个神经元的计算结果.
3) 求和层
负责将各类的模式层单元进行连接汇总求和取均值,其计算公式为
(10)
式中,n为第i种模式的训练样本个数.
4) 输出层
将求和层中得分最高的那一类进行输出
O(x)=max[φij(x)].
(11)
2 室内外场景中的泛在信号分析
为了分析室内外存在的WiFi信号、GNSS可用星数、光照强度以及地磁强度的变化趋势及稳定性,本文对室内外环境中的WiFi信号、GNSS可用星数、光照强度以及地磁强度数据进行了采集并分析.每次采集过程为先由室内到室外,再由室外到室内进行数据采集,室内外采集距离均为20 m,通过手机端采集的5次数据分析室内外环境中4种不同泛在信号的变化情况,每种信号的变化趋势如图2所示.

(a)WiFi的接收信号强度(RSS)变化趋势 (b)GNSS可用星数变化趋势
对5次采集数据进行分析可看出室内外环境中4种不同的泛在信号变化趋势都比较稳定.其中,对于WiFi信号,由图2(a)可知手机端接收到的接收信号强度(RSS)随距离增大而衰减,在室内变化范围为-60 ~-40 dBm,在室外变化范围为-80~-60 dBm;对于GNSS可用星数,由图2(b)可知相对于室内复杂结构的遮挡,空旷室外环境更有利于手机端搜索GNSS信号,GNSS可用星数在室内变化范围为15~25颗,室外变化范围为25~40颗;对于光照强度,由图2(c)可知在没有开灯的室内变化范围为0~3000 Lux,而在只有太阳光照的室外其变化范围为3000~60000 Lux;但对于地磁信号,由图2(d)可知地磁信号的三个轴方向的地磁强度在室内和室外的变化范围及趋势差异性不大.因此,根据对室内外场景中的泛在信号进行分析可得,室内外环境中的WiFi信号、GNSS可用星数和光照强度变化比较明显,对室内外场景感知是有利的,而地磁信号变化差异较小,不利于室内外场景的识别,在本文的实验部分对该结论进行了进一步的验证.
3 改进的AdaBoost+PNN模型
由于传统的AdaBoost算法对数据分布不平衡数据集的分类精度较差,并且每次迭代的弱分类器所存在的偏差会影响下次迭代的弱分类器.因此,本文采用改进的AdaBoost+PNN模型对传统的AdaBoost算法进行改进,改进的AdaBoost+PNN作为泛在信号融合的室内外场景鲁棒感知算法如图3所示,改进的AdaBoost+PNN模型如图4所示.

图3 泛在信号融合的室内外场景鲁棒感知算法

图4 改进的AdaBoost+PNN模型
针对传统AdaBoost算法中的迭代弱分类器的分类精度不高问题,本文采用PNN作为迭代的弱分类器进行学习训练,利用PNN的分类能力强、容错性好等优点来进一步提升迭代过程中单一弱分类器的分类准确率.
其次,为了提高传统AdaBoost算法中由弱分类器组合而成的强分类器的分类准确性和鲁棒性,本文改进的算法模型又引入了熵权法对传统AdaBoost算法迭代产生的弱分类器的权重进行修正,将传统AdaBoost算法中由PNN作为弱分类器的分类结果看成两个指标,即正确指标和错误指标,迭代产生的弱分类器的权重看作弱分类器的初始权重,然后利用熵权法首先计算出每个指标的权重,再由指标权重分别计算出每个弱分类器初始权重的综合得分,最终由每个弱分类器的初始权重与其综合得分的乘积作为该弱分类器的真实权重.
改进的AdaBoost+PNN模型算法步骤如下:
1) 初始化k个训练样本权值分布,每个样本权值为1/k,训练样本的初始权值分布为
i=1,2,…,k.
(12)
2) 由权值分布为Dm(m=1,2,3,…,N)的训练样本集x对PNN进行训练后作为一个弱分类器,
PNNm(x):x→{-1,+1}.
(13)
3) 计算每个弱分类器的误差率为

(14)
4) 计算每个弱分类器PNNm(x)的权重为
(15)
5) 更新训练样本权值分布为
Dm+1=(wm+1,1,wm+1,2,…,wm+1,i,…,
wm+1,k),
(16)
其中,

(17)
归一化因子:

(18)
6) 若未达到迭代次数N,则返回步骤2)继续进行迭代,直至迭代得到N个弱分类器.

8) 计算第m个弱分类器在第j项指标下所占比重为
(19)
9) 计算第m个弱分类器的第j项指标的熵值为

(20)

(21)
10) 计算第m个弱分类器的第j项指标的权重为
(22)
11) 计算m个弱分类器的综合得分为
(23)
12) 将各弱分类器的综合得分与其权重相乘作为其系数组成一个强分类器为
G′(x)=sign(f(x))
(24)
4 实验与结果分析
4.1 数据采集
4.1.1 模型训练数据集和测试数据集
为了对本文所提出改进AdaBoost+PNN模型进行训练和测试,本文对实验环境中的WiFi信号、GNSS信号、光照强度信号以及地磁信号进行大量采集,其中正样本为室内样本,负样本为室外样本,试验场地示意图如图5所示.整个实验区域大小为40 m ×8 m,室内和室外实验区域大小均为20 m ×8 m.采集时天气状况为多云,室外日照强度充足,室内没有其他光源干扰.采集设备为荣耀Magic2安卓手机,采集时采集者将手机水平持于正胸前.本文在室内区域布置4个实验无线接入点(AP),为了均匀采集整个试验场地中的4种泛在信号数据,本文将试验场地划分为1 m ×1 m的网格区域,在每个网格的中心以采集频率为2 Hz,采集时间为30 s,进行模型训练数据和测试数据采集,整个采集时间段为9:00-17:30,整个数据集共有26 216条数据,其中训练数据集为18 327条,测试数据集为7 889条.
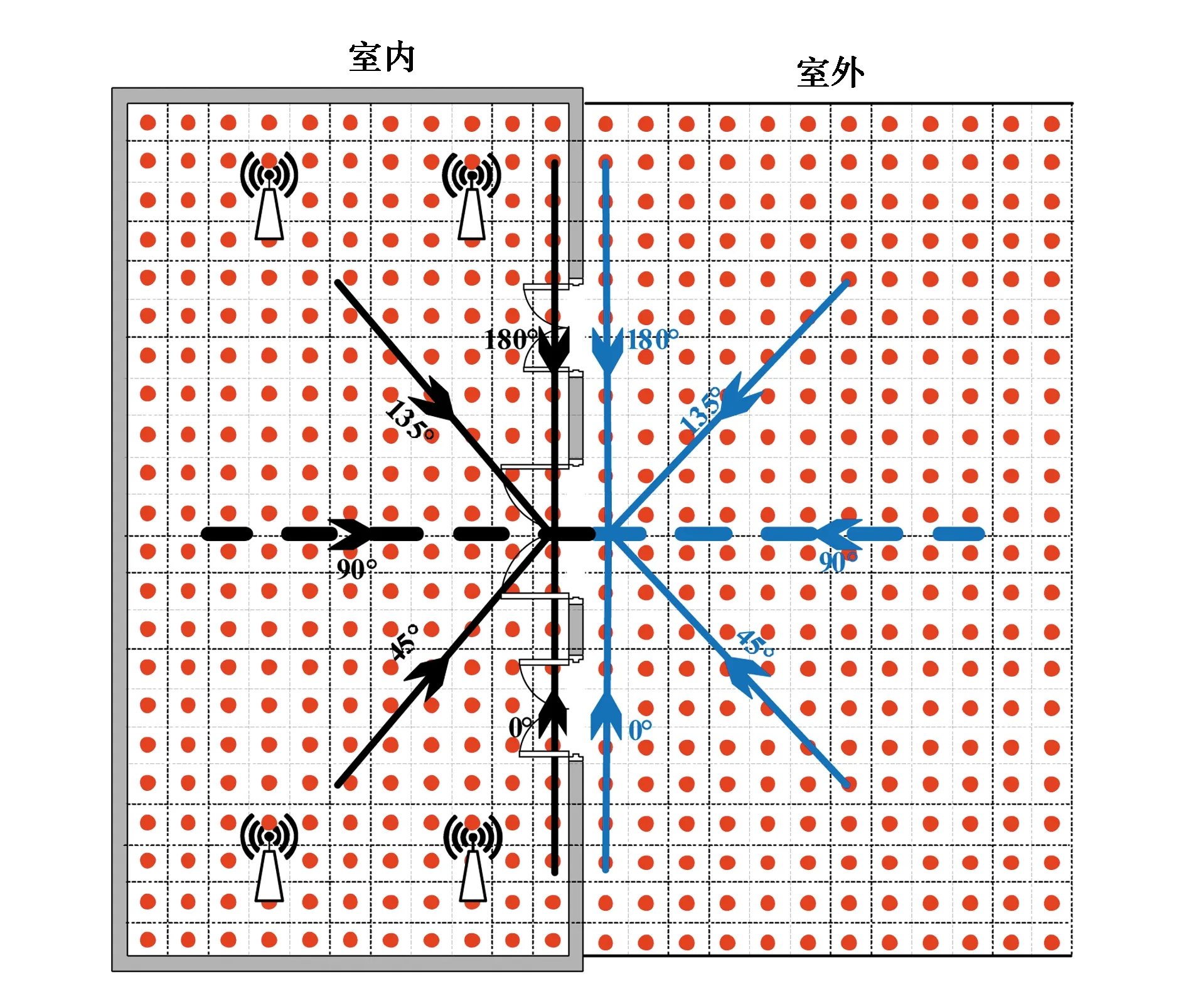
图5 试验场地示意图
4.1.2 不同角度方向测试数据集
为了进一步验证经过训练和测试后的模型的性能效果,本文依据实际应用中用户会从多个方向由室内到室外或由室外到室内,因此,本文将进入室内方向和进入室外方向按角度分别划分为5个角度方向,分别为0°、45°、90°、135°、180°方向,数据采集频率为2 Hz.其中,由室内到室外的采集路径为室内的5个角度方向分别与室外90°方向作为一条室内到室外的测试数据集采集路径,如图6(a)所示,每条采集路径的测试数据集数据分别有414条、407条、418条、432条、447条;由室外到室内的采集路径为室外的5个角度方向分别与室内90°方向作为一条室外到室内的测试数据集采集路径,如图6(b)所示,每条采集路径的测试数据集数据分别有563条、433条、423条、419条、434条.

(a) 室内到室外 (b) 室外到室内图6 不同角度方向测试数据集采集路径
4.2 泛在信号组合实验对比分析模型性能
利用室内外环境中存在的WiFi信号、GNSS可见星数、光照强度以及地磁强度进行组合对比试验,采用准确率(Accuracy)、精确率(Precision)、召回率(Recall)以及受试者工作特征(ROC)、曲线下的面积(AUC)指标来分析本文提出的泛在信号融合的室内外场景鲁棒感知算法的模型性能,各项性能指标的计算公式分别为

(25)
(26)
(27)
式中:TP为将室内样本预测为室内的样本数;FP为室外样本预测为室内的样本数;FN为室内样本预测为室外的样本数;TN为室外样本预测为室外的样本数.
由5种组合对比试验得到的ROC曲线如图7所示,每种组合实验所得到模型的准确率、精确率、召回率和AUC如表1所示.由4种泛在信号组合对比实验分析可知,当不结合地磁信号时,采用WiFi+GNSS可用星数+光照时模型的准确率分别比只采用WiFi、WiFi+GNSS可用星数的准确率高30%和17.94%,AUC也分别比只采用WiFi、WiFi+GNSS可用星数高13.85%和5.59%.当结合地磁信号时,采用WiFi+GNSS可用星数+地磁比采用WiFi+GNSS可用星数的准确率降低3.63%,精确率降低1.73%,召回率降低5.14%;采用WiFi+GNSS可用星数+地磁+光
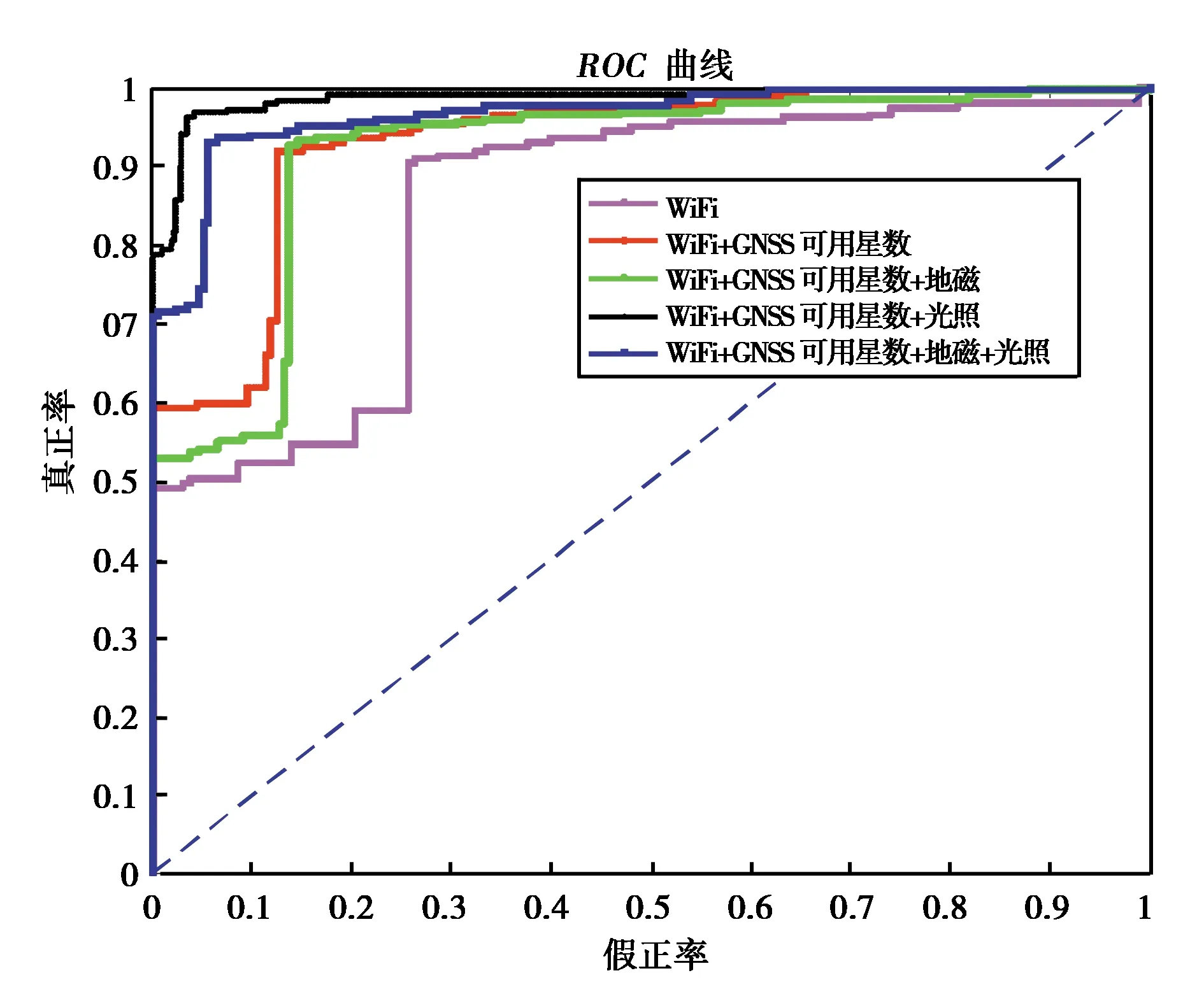
图7 泛在信号组合实验对比分析
照比采用WiFi+GNSS可用星数+光照时的准确率降低7.6%,精确率降低1.91%,召回率降低11.17%.
因此,由泛在信号组合实验结果对比分析可知,由于室内外地磁信号变化差异性较小,本文模型结合地磁信号时,会降低模型性能,只采用WiFi+GNSS可用星数+光照强度时,本文所提出的模型性能最佳.
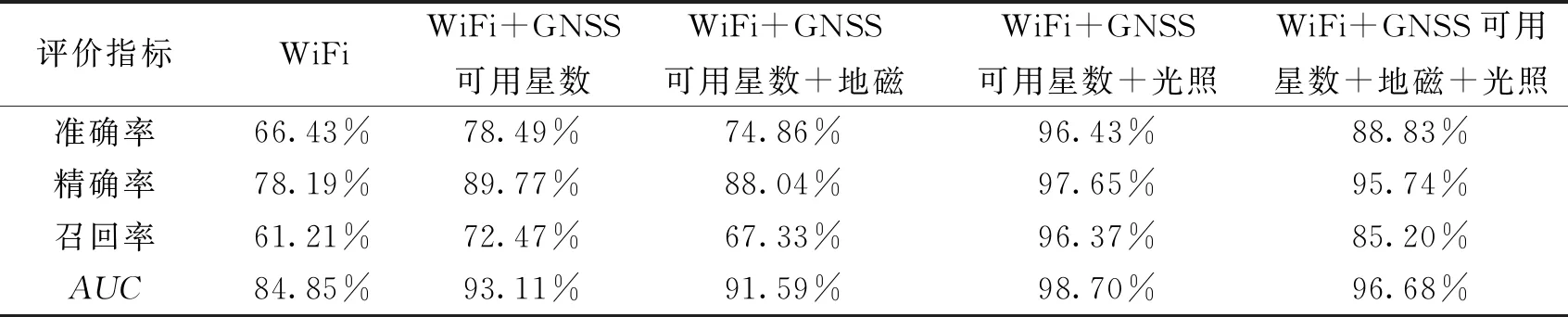
表1 4种泛在信号组合对比试验结果
4.3 不同角度方向测试分析模型性能
为了验证本模型的可靠性,利用0°、45°、90°、135°、180° 5个方向的测试数据集,采用准确率、精确率和召回率这三个指标进行测试分析本文算法进行室内外场景感知的性能及其鲁棒性,室内外多角度方向测试结果如图8所示.

图8 室内外多角度方向测试结果
由多角度方向数据集中的室外到室内的5个方向数据集的测试分析可知,本文所提算法模型在45°、90°以及135°方向上的识别准确率、精确率及召回率均达到92%以上,而在0°方向时准确率和精确率分别为82.8%、81%,召回率也低于80%,在180°方向时的准确率和召回率也均低于70%;另外对多角度方向测试数据集中的室内到室外的5个方向数据集进行测试分析可知,该模型在45°、90°和135°方向上的识别准确率、精确率以及召回率也都在90%以上,而在0°和180°方向上模型的准确率、精确率以及召回率都低于80%.因此,由室内外5个方向的测试数据集进行测试的结果分析可知,当在45°、90°以及135°方向上时模型的性能效果要优于在0°和180°方向时的模型效果,主要原因是由于在0°以及180°方向上的区域处于室内与室外环境的交界处,在交界处室内与室外WiFi信号的RSS、GNSS可用星数以及光照强度数据差异较小,所以模型性能有所降低,而在45°、90°和135°方向上,室内外WiFi信号的RSS、GNSS可用星数以及光照强度数据差异较大,本文算法模型性能则更佳.
4.4 与其他方法对比分析
为了对比分析本文提出的改进AdaBoost+PNN模型效果,将本文模型与支持向量机(SVM)算法、AdaBoost+BP神经网络、Random Forest算法以及AdaBoost+PNN分别利用本文模型训练和测试数据集进行对比训练和测试,对比测试实验结果如图9所示.
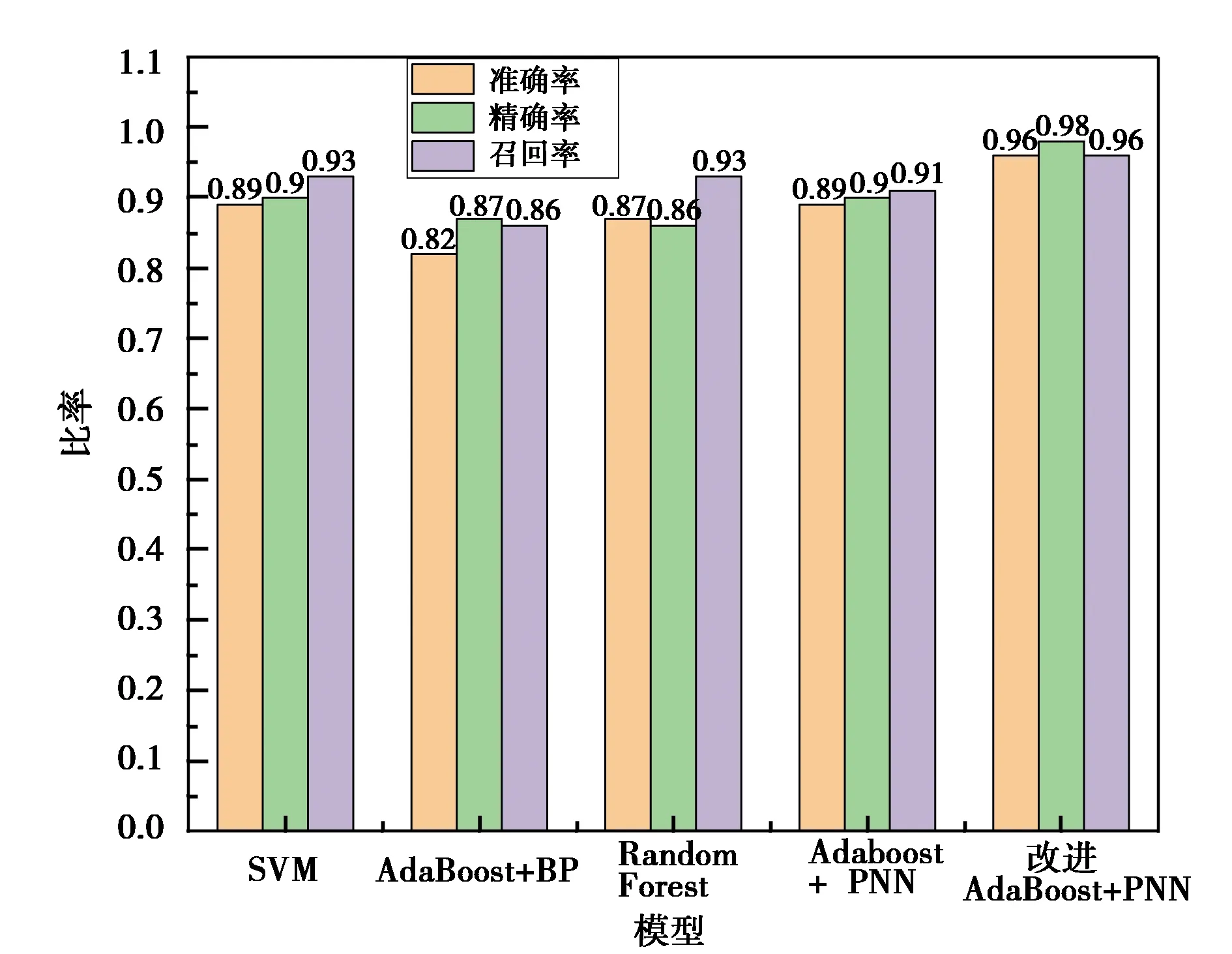
图9 5种模型对比结果
实验对比结果表明,本文提出的改进AdaBoost+PNN模型分类的准确率、精确率和召回率三项指标都达到96%以上,相比于传统AdaBoost与PNN结合模型的准确率、精确率和召回率分别提高了7%、8%和5%,而相比于另外3种模型,在准确率方面也提高了7%~14%,精确率提高了8%~12%,召回率提高了3%~10%.因此本文所提出的改进AdaBoost+PNN模型与SVM算法以及Random Forest算法相比在室内外场景感知时性能更优,与传统的AdaBoost算法结合BP神经网络相比,模型性能也有所提升.
此外本文所提出的模型还分别与文献[9]、文献[11]以及文献[14]的方法进行了实验对比,利用相同的数据集进行对比的实验结果如表2所示,其中文献[9]、文献[11]以及文献[14]方法的准确率分别为88.2%、85.3%和85.6%,而本文所提算法模型的准确率达到96.43%,相比分别提高了8.23%、11.13%和10.83%,因此本文所提出的模型性能相比文献[9]、文献[11]以及文献[14]所提方法性能有所提升.

表2 与其他文献方法对比
5 结束语
本文提出了一种基于泛在信号融合的室内外场景鲁棒感知算法,对室内外环境中的4种泛在信号的差异性进行分析后,利用本文提出的改进的AdaBoost算法+PNN对4种泛在信号进行组合对比试验和不同角度下的性能测试实验.实验结果表明,本文所提算法利用室内外的WiFi信号、GNSS可用星数以及光照强度这三种泛在信号进行室内外场景感知时,算法模型的准确率、精确率及召回率均超过96%,在45°、90°及135°方向上的模型识别准确率也均在90%以上,与其他现有方法进行对比,室内外场景感知性能也有较大提升.另外,为使本文提出的算法能够在0°和180°角度方向上的性能更佳,在多个室内外场景中感知识别稳定性和准确率更高,下一步将对本文算法进行进一步改进,提高本文算法感知精度以及场景适应能力.
