基于改进阈值的风机齿轮箱故障信号小波去噪方法研究
2020-09-17傅成豪潘庭龙
傅成豪, 潘庭龙
(江南大学, 江苏 无锡 214122)
0 引言
大功率风电机组主流机型为双馈风力发电机。 双馈风力发电机风电齿轮箱的主要故障包括齿面磨损、齿面点蚀和齿面断裂等[1]。齿轮箱故障会导致风电机组长时间停止工作,造成经济损失,影响电力系统的稳定性[2]。行星齿轮箱因为其传动比大、承载能力强的优点,被广泛用于风力发电机中,但其振动信号比其它齿轮箱更加复杂,还存在故障信息不明显以及特征难以提取的问题。这是因为行星齿轮箱的内部结构导致振动传递路径复杂,且风力机的工作环境恶劣,存在大量的外界噪声干扰,降低了信号的信噪比[3]。齿轮的运动包括自转与公转, 响应复杂,各个齿轮之间存在耦合,使得振动信号为非线性信号,又因为负载的变化,会使信号不平稳。 因此,须要采用高分辨率的分析手段才能进行特征提取。在此之前,必须对采集到的信号进行去噪,以获得有效的振动信号[4]。
小波变换是一种常用的信号去噪方法,具有低熵性、多分辨率和去相关性等优点,在时域、频域都能体现出信号特征。一直以来小波变换在去噪方面的应用研究都是热点[5],[6]。针对传统小波去噪中存在的连续性差、存在偏差等问题, 研究人员提出了改进阈值方法,但大多为固定分段阈值,去噪效果提升有限[7]。
本文提出了一种新型的阈值函数, 使用非线性曲线代替传统阈值中的线性曲线。 通过matlab 软件进行仿真验证, 构造了测试信号, 采用信噪比和均方根误差两个指标对不同阈值的去噪效果进行评价, 证明了新阈值函数的可行性和有效性。
1 小波阈值去噪
1.1 原理
基于小波变换的阈值去噪方法的主要步骤如下:
①选择合适的小波对所给信号进行小波变换得到小波系数;
②计算阈值并选用合理的阈值函数对小波系数进行修正;③将修正后的小波系数重构,得到去噪信号。图1 为3 层分解示意图。 图1 中X 为原始信号,cA 为低频系数集,cD 为高频系数集[8]。
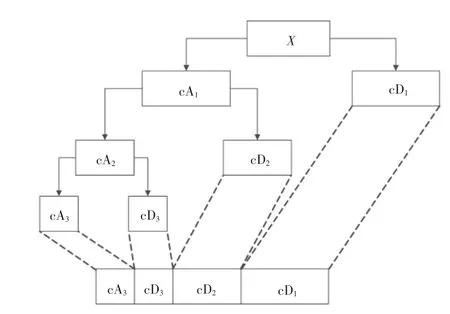
图1 3 层小波分解结构Fig.1 Level-3 wavelet decomposition
1.2 阈值选取
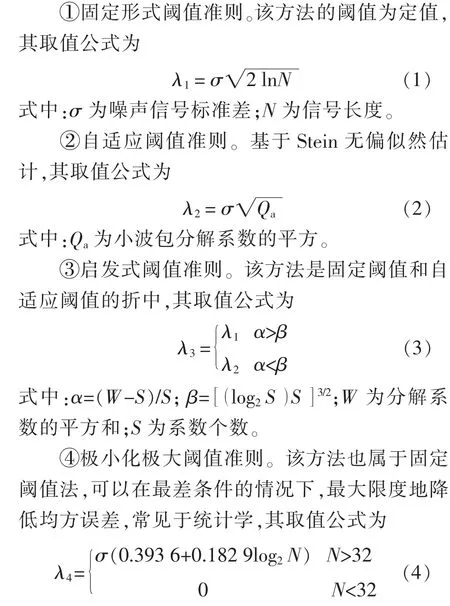
小波包分析中常用的4 种阈值准则包括固定形式阈值准则、自适应阈值准则、启发式阈值准则和极小化极大阈值准则[9]。
1.3 阈值函数
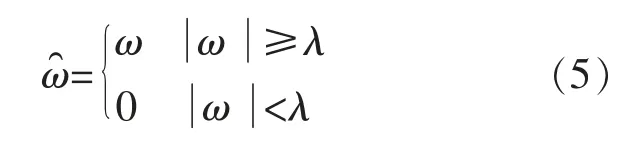
在对小波函数进行阈值去噪时,常见的方案为软阈值去噪和硬阈值去噪。硬阈值函数为
软阈值函数为

式中:ω 为分解系数;ω 为计算得到的小波系数。
两种方法计算简单,易于实现,效果良好,但是存在明显的缺陷。 硬阈值去噪法将系数绝对值低于阈值的置零,其余保留。缺点是在λ 处不连续,导致小波重构时会出现明显震荡。软阈值法虽然在λ 处连续, 但是与真实的小波系数存在固定偏差,会影响重构信号的精度。为了降低两种方法的缺点在重构中的影响, 对阈值函数进行了改进。
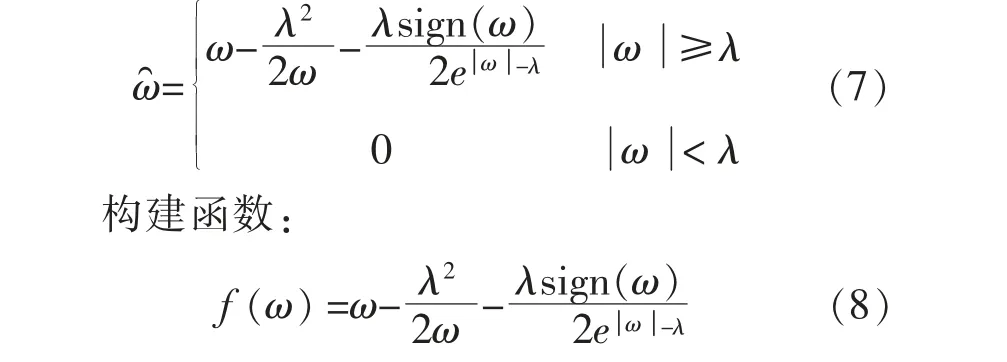
从以下3 个方面对该函数进行考察, 以验证其理论上的可行性。
①函数奇偶性
函数定义域为R,且满足f(ω)=-f(ω),所以该函数为奇函数,与软阈值和硬阈值函数一致。
②函数连续性
因为f(ω)为奇函数,所以接下来只讨论正半轴。 因为f(ω)为分段函数,所以需要讨论ω=λ 处的连续性。 通过计算可以得出f-(λ)=f+(λ),根据连续性定义,可以得出f(ω)在ω=λ 处连续,因为f(ω)为奇函数,所以f(ω)在ω=-λ 处连续。函数的连续性可以减少硬阈值函数不连续而导致的重构信号震荡问题。
③函数渐近线

可知f(ω)的渐近线为ω=ω,当ω 较大时,可以有效减少软阈值函数存在的固定偏差问题。
软阈值、 硬阈值和改进阈值的对比如图2 所示。 改进阈值分布在软、硬阈值曲线之间,既解决了阈值处不连续的问题, 又缓解了恒定偏差带来的能量损失问题。

图2 软阈值、硬阈值和改进阈值的对比图Fig.2 Soft threshold,hard threshold,improved threshold comparison
2 仿真验证
在仿真实验中, 考虑到加速度信号的特点,生成与之相似的仿真纯净信号,并且对其加噪,再利用不同的阈值规则去噪,得到去噪信号。 通过计算得到去噪信号的信噪比(SNR)和均方根误差(RMSE),以此对去噪效果进行评估[10]。
2.1 信号构造
当齿轮箱中输入级齿轮存在点蚀故障时,仿真信号为[11]

式中:k0,k1,k2,k3,θ1均为齿轮箱的相关系数。
考虑到实测信号中必然会存在一些噪声和其他部件的混杂信号,本文在该仿真信号的基础上,混入了blocks 信号和HeaviSine 信号, 再利用awgn 函数对其添加噪声,得到用于仿真测试的信号(图3)[12]。
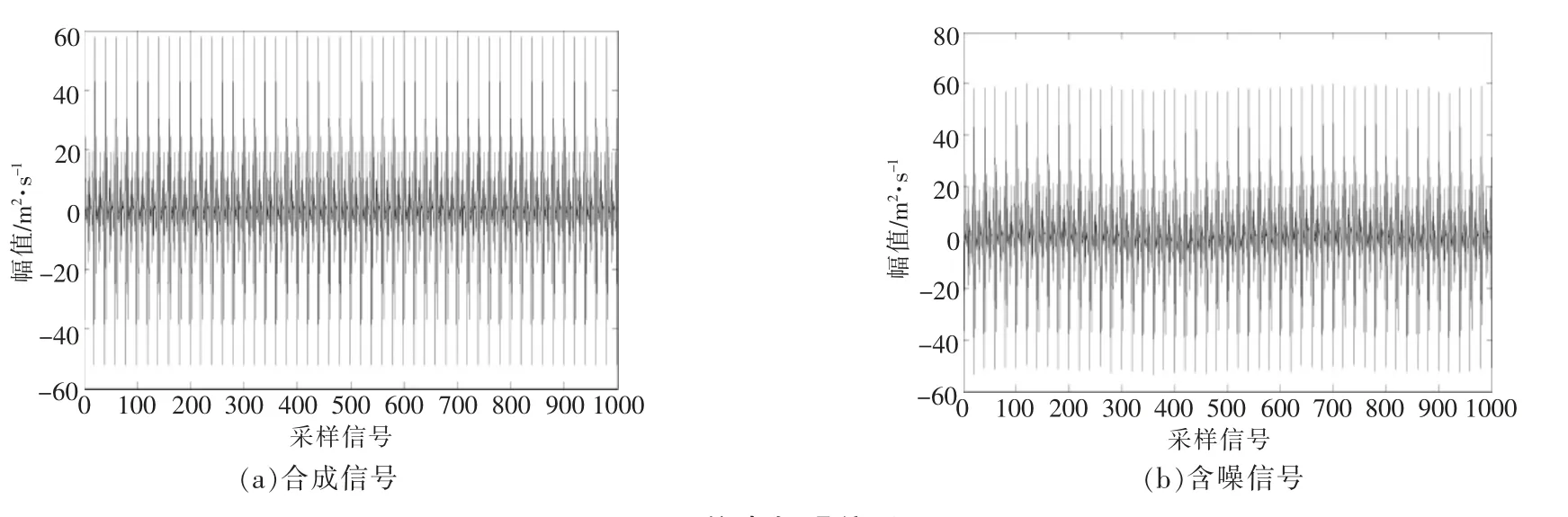
图3 仿真加噪信号Fig.3 Noise Singal
2.2 评价指标
SNR 和RMSE 这两个指标常用于评价降噪效果,本文也采用这一评价标准。
SNR 是计算信号中噪声含量,是有用信号功率和噪声功率的比值。
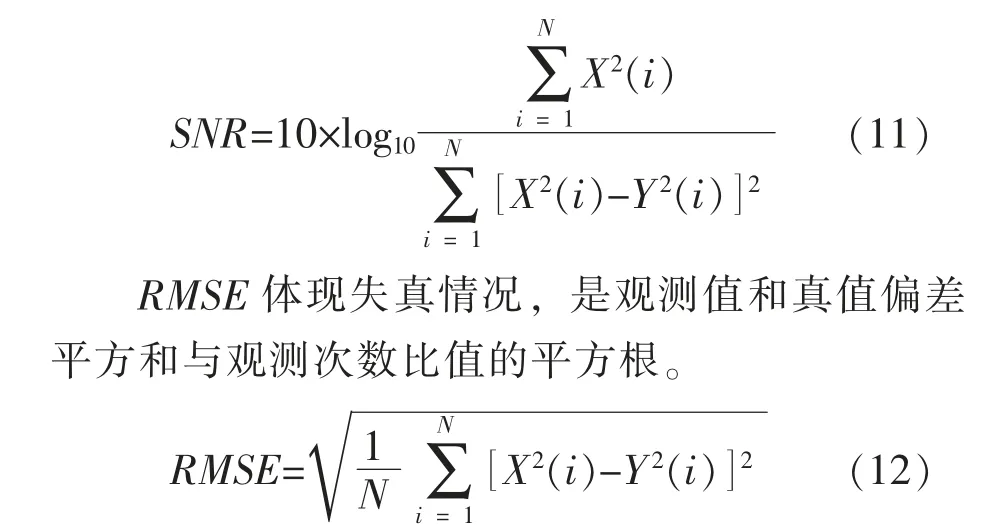
式中:X(i)为降噪后信号;Y(i)为原始信号;N 为采样次数。
当信号能量大于噪声能量时,SNR 大于0,反之为负。由式(11),(12)可知,SNR 越大,RMSE 越小,则去噪效果越好。
2.3 仿真实验
本文选取了与实际齿轮箱加速度信号相类似的Daubechies3 小波作为基波, 使用wavedec函数对测试信号进行3 层分解。分别采用固定阈值法、自适应阈值法和启发阈值法对测试信号进行去噪, 并且采用SNR,RMSE 两项指标对去噪效果进行评估。选取这几种方法中效果最好的一种作为改进阈值去噪法的阈值准则。去噪后的波形如图4 所示。

图4 传统方法去噪效果比较Fig.4 Comparison of traditional denoising methods
经过对比,发现固定阈值法对齿轮箱故障仿真信号的去噪效果最佳, 故选取该方法作为改进阈值法的阈值准则进行去噪。 若小波分解的分解层数过多,对于降噪效果影响较大,同时对各层小波空间系数进行阈值处理会造成信息严重失真,同时增加运算量,降低信噪比。分解层数过少则会残留大量噪声,信噪比提升幅度较低。
本文通过对比不同分解层数的分解效果,决定最优分解层数。 改进阈值算法的分解效果图如图5 所示。 不同降噪方法的去噪指标评价对比如表1 所示。
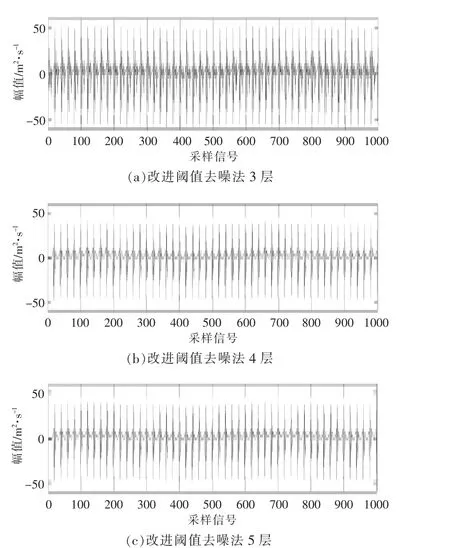
图5 改进阈值算法Fig.5 Improved method
通过图4,5 和表1 可知,对于仿真测试信号,相比于传统的软阈值、硬阈值去噪法,改进阈值去噪法有着更高的信噪比和更低的均方根误差,说明改进阈值去噪法具有更好的去噪效果。同时,当分解层数增加时,出现了过去噪现象,得到的去噪信号严重失真,降低了信号信噪比。
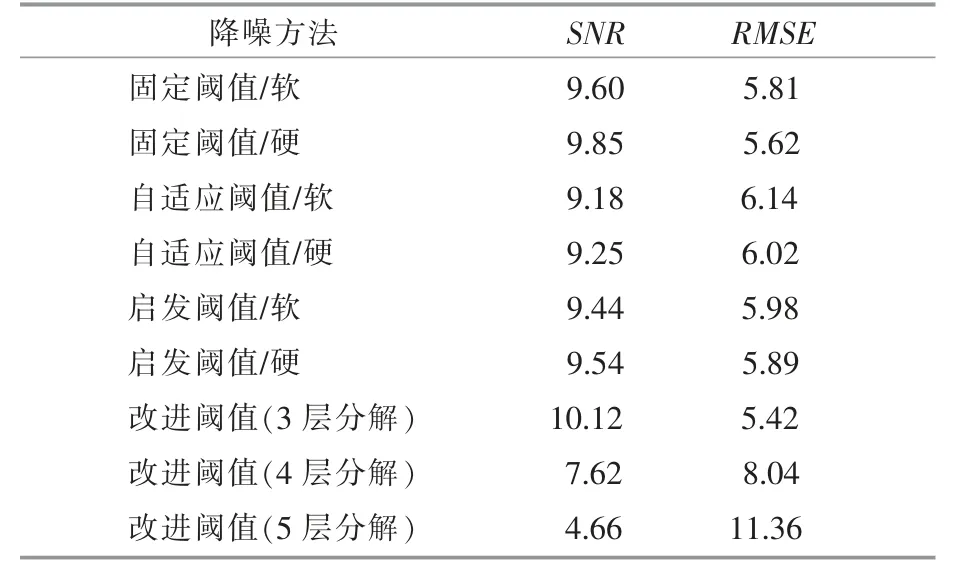
表1 不同降噪方法的SNR,RMSE 比较Table 1 SNR,RMSE of methods
3 实际信号去噪
经验模态分解(EMD)是一种应用广泛的信号时频分析方法,常用于故障信号的分解。但该方法存在模态混叠问题,会降低分析精度。针对这一问题,学者们在EMD 基础上进行了改进,提出了总体平均经验模式分解(EEMD),通过添加高斯白噪声来避免模态混叠。
EEMD 去噪会直接去除信号中的高频部分,这会使信号失真,因此,本文采用如下步骤对信号进行处理。
①进行EEMD 分解,得到IMF(Intrinsic Mode Function)分量。
②将分量按照高频、低频进行分类。③对高频部分进行去噪。
④进行信号重构。
EEMD 去噪方法的步骤如图6 所示。
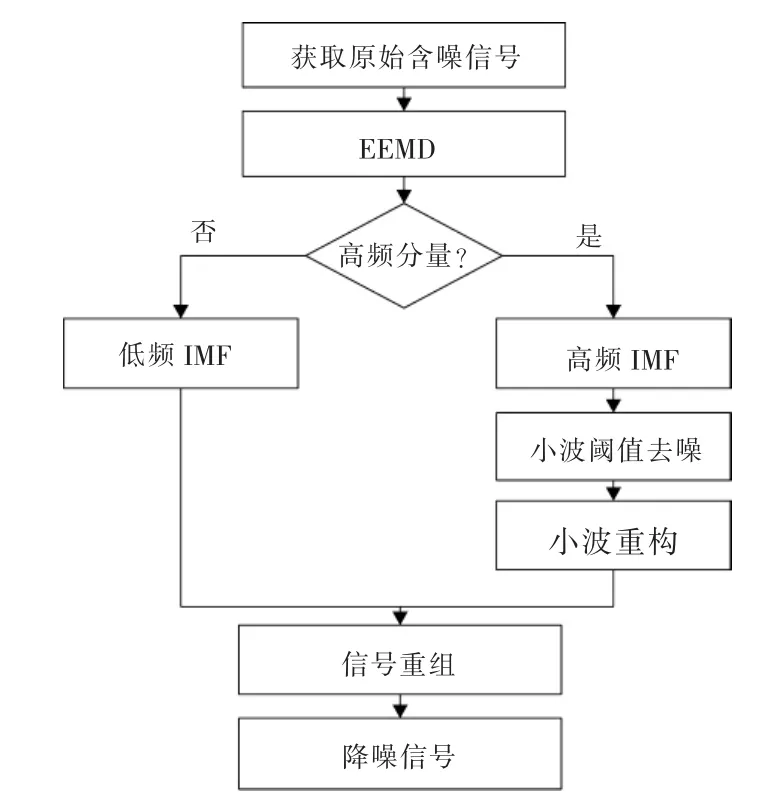
图6 EEMD 去噪步骤Fig.6 EEMD denosing steps
从旋转机械振动分析及故障诊断实验平台采集的带噪声信号如图7 所示。 信号来源为齿轮箱轴承输出侧加速度信号,采样频率为5 120 Hz。
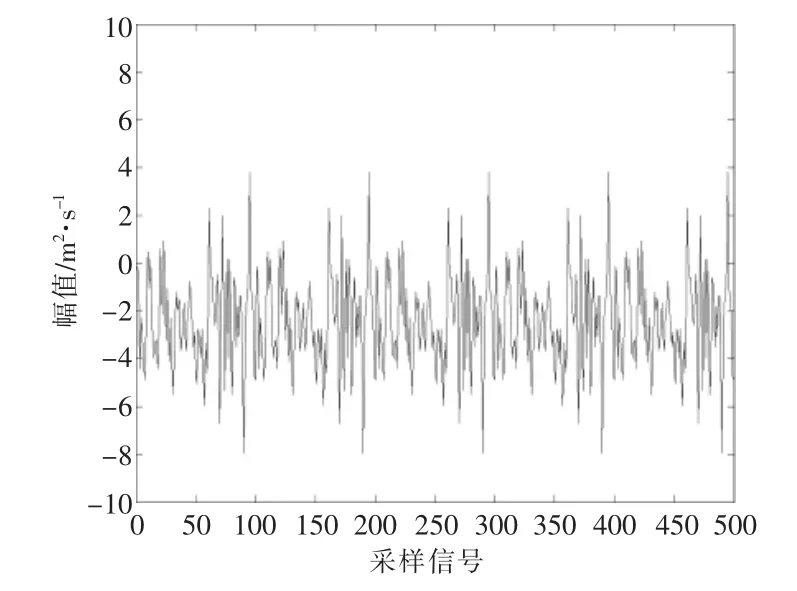
图7 带噪声信号Fig.7 Noise signal
由图7 可知,该信号含有大量噪声,且噪声频率极高,难以直接进行分析,须要进行去噪处理。根据本文仿真实验的结果, 阈值准则采用固定阈值准则, 阈值函数选取本文提出的改进阈值函数法,分解层数为3 层,使用wavedec 函数对实测信号按照图6 的步骤进行去噪处理。
EEMD 分解后存在3 个高频分量IMF1,IMF2,IMF3, 对这3 个分量进行小波改进阈值去噪处理,得到处理后的分量如图8 所示。

图8 高频分量去噪Fig.8 High frequency component denoising
将保留的低频分量和去噪后的高频分量进行重构,得到如图9 所示的去噪信号。

图9 去噪信号Fig.9 Denoised signal
通过对比可以发现,与原始信号相比,去噪重构信号变得更为光滑、真实,带有的高频噪声明显减少,可用于后续的信号分析与计算。
4 结论
本文提出了一种改进阈值去噪方法,能够解决硬阈值函数在阈值处的不连续问题,降低软阈值函数的偏差问题。
①利用齿轮箱仿真故障信号进行仿真实验,选取合适的阈值准则与分解层数,对比结果证明了该方法可以提高信噪比、降低均方根误差,能够对齿轮箱故障信号有效去噪。
②对于实际加速度信号,采用EEMD 方法进行分解,针对EEMD 直接去除高频分量,引起信号失真的问题,在保留低频分量的同时,对高频分量进行小波去噪,随后将去噪后高频信号与低频信号重构,得到所需要的去噪信号。
③带噪声信号中幅值较大、频率较高的干扰信号被去除,所得去噪信号可以用于后续的处理和分析。
