不同水深条件下的VLCC停船性能仿真研究
2020-09-16张德兴北部湾大学海运学院
张德兴 北部湾大学海运学院
程义峰 重庆市涪陵区港航管理局
1.引言
世界工业的快速发展离不开能源,石油作为一种主要的能源形式,需求量日益在增大。由于VLCC船舶具有载重量大,相对运输成本低廉的特点,逐渐成为石油运输的主力船型。然而正是因为VLCC由于载重量大、吃水大,尺度长、惯性大的特点,其在航行中尤其是进出港等水深受限情况下面临着更大的碰撞风险。VLCC碰撞事故一旦发生将会带来巨大的经济损失和环境损害。船舶碰撞事故的发生在多数情况下都是由于驾驶员对操纵性的掌握不慎所致,这其中的停船性能起着关键的作用。充分了解VLCC船舶停船性能对尤其在受限水域条件下对船舶安全有重要意义。目前针对停船性能研究多基于平吃水条件,本文基于模拟器,对该类型船舶在不同水深条件下的停船性能进行仿真模拟,探究了水深与其停船性能直接的内在联系。
2.不同水深条件下的VLCC停船模拟
2.1 模拟器介绍
本论文基于TRASAS船舶操纵模拟器完成,模拟器主要由建模部分和操纵部分构成。建模部分又有场景建模部分Scen Editor和船舶建模部分model editor组成,场景建模部分主要负责虚拟船舶海上实验场地的建立和实验条件的编辑,后者负责模拟船舶的建立。操纵部分为NTPRO 5000型操船系统,该系统具有7个可视化视景通道和动态声像功能的360度三维视景空间,能够使操纵着具有较好的模拟真实感,即物理真实感、环境真实感和物理真实感。模拟器主要部分如图1所示。

图1 模拟器各部分

表1 船舶参数
2.2 仿真船舶参数
本文的研究对象为一艘满载状态下的VLCC船舶,通过建模工具完成了该船的几何建模和运动模型建模。船舶几何参数见表1,几何模型见图2。
2.3 仿真实验方案
本文研究目的在于探究水深变量对船舶船舶停船性能的影响,故而实验方案设定时使用控制变量法,除水深变化外,其他条件不变,无风无流,开敞水域。水深变量采用h/d的无量纲数值,选取水深时考虑根据国际操船规范中有关浅水的定义,本文选取将h/d从1.1到2.5区间作为研究范围,对该范围内不同水深条件下的停船过程进行了仿真模拟。

图2 船舶模型
3.不同水深条件下的VLCC停船性能分析
3.1 纵向进距与水深关系的分析
仿真实验得出了船舶在不同水深条件下的停船纵向进距数据,为了结果的普适性,将纵向进距与船长相比得到了其无量纲值,图3中横坐标为水深吃水比,纵坐标为纵向进距与船长之比。通过图表可以看出随着水深的增加VLCC的停船纵向进距之间变小,纵向进距与水深成反相关的关系。同时可以看出水深吃水比小于1.5时,水深对纵向进距的影响相对较小,大于1.5以后大幅度下降,水深对纵向进距的影响变得明显,最终随着水深的增加趋于不变。
3.2 横向偏移量与水深关系的分析
横向偏移量表征船舶停船过程的所需横向水域大小,对船舶避碰决策有重要意义。通过仿真实验数据的处理,得到了VLCC船舶在不同水深条件下的停船横向偏移量,同样对横向偏移量进行了无量纲处理,在图4中横坐标为水深吃水比,纵坐标为横向偏移量和船长之比。通过图4可以看出,对于右旋固定螺距螺旋桨船舶,随着水深的不断增加,VLCC的横向偏转方向由右偏转逐渐变为左偏,当水深吃水比小于1.5时,船舶横向偏移量向右,并随着水深增加而变小;水深吃水比大于1.5后,船舶横向偏移量向左,并随着水深的增加左偏量逐渐增加,最终趋于稳定。
3.3 速度变化与水深关系的分析
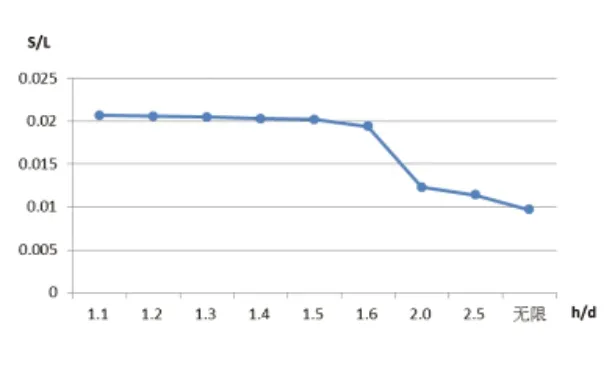
图3 纵向进距与水深关系图

图4 横向偏移量与水深关系图
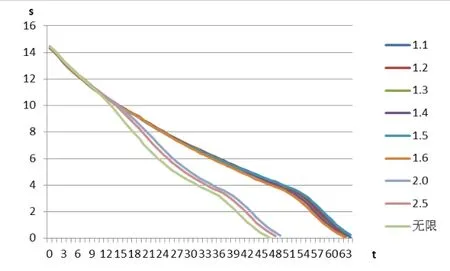
图5 速度变化与水深关系图
停船过程中船舶速度的变化率大小在一定成程度体现了船舶停船性能的优劣,对于避碰距离的选取至关重要。如图5所示,图中横坐标为停船过程的时间点,纵坐标为船舶纵向速度。通过图表可以发现水深对速度的下降速率有一定影响,在停车的初始阶段水深对速度下降速率影响不大,后续随着水深的增加速度下降速率逐渐增加,即水深越大船舶的速度变化率越大,停船效果越好。
3.4 航向变化量与水深关系的分析
航向变化量体现出船舶的保向性能,停船实验开始时船舶的航向为000,故航向变化量即为船舶停止运动时的船舶航向。通过仿真实验获取了不同水深条件下的航向变化量,如图6所示,图中横坐标为水深吃水比,纵坐标为航向变化量。通过图标可以发现,航向变化量的变化规律和停船横向偏移量基本相似。水深吃水比小于1.5时,对于右旋固定距螺旋桨船舶航向右偏,且右偏值几乎不受到水深的影响;水深吃水比大于1.5后,航向左偏,且左偏值受水深影响较明显,随水深增加左偏量增加,最后趋于平稳。
4.结论
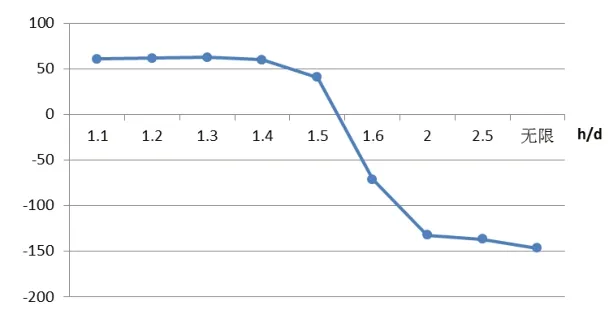
图6 航向变化量与水深关系图
本文利用船舶操纵模拟器对不同水深条件下的VLCC停船性能进行了仿真,通过对仿真数据分析得出了停船参数与水深直接的内在联系。VLCC的停船纵向进距随着水深的增加而增加,故而在实践作业中深水条件时的停船操纵要留有更大的安全余量;右旋固定螺距VLCC停船横向偏移量和航向变化量均随水深增加先右偏后变左偏,且右偏段右偏量受水深变化影响较小;停船过程中的速降率随水深的增加而增加。