空间碎片主动移除技术研究综述
2020-09-16申麟陈蓉焉宁张雨佳
申麟,陈蓉,焉宁,张雨佳
(中国运载火箭技术研究院,北京100076)
1 前言
自1957年苏联发射Sputnik 1卫星后,人类便进入太空时代,外层空间已经成为人类生存与发展的一个重要领域。空间碎片是人类探索和利用外层空间的产物,是人类在进行外空活动时产生的各种废弃物及其衍生物。截至2019年1月底,美国空间监测网 (Space Surveillance Network,SSN)编目10cm以上在轨废弃物数量已超过2万个,这些编目内的在轨废弃物数量仅占碎片总量的0.02%。而无法编目的微小废弃物重量已达几千吨,数量超过10亿个。最近几年,随着科技的不断进步,进入外空的门槛不断降低,卫星应用在民用和商用领域不断拓展,微纳卫星数量急剧增多。全球几大商业航天巨头纷纷提出了庞大星座计划:OneWeb的星座计划将由600多颗卫星组成,SpaceX公司规划发射4.2万颗小卫星组成星链星座。此外在全球范围内还有各种大大小小的星座计划,小卫星数量相当可观。这些发射到外层空间的小卫星在其失效后将成为新的空间碎片,如此庞大数量的卫星进入轨道,极有可能引发大量碎片的产生,甚至导致链式反应[1]。
数以万计的小卫星进入太空,当轨道上布满各种各样的卫星,新的卫星发射窗口被一步步压缩,采取复杂的空间碎片规避策略将带来高昂的代价,科学研究卫星也将不得不置于更遥远的轨道,这些都将造成未来卫星研制和发射成本的骤然增长[2]。
空间碎片对人类的空间资源利用活动构成了极大的威胁,空间环境的不断恶化已成为当今国际社会面临的全球性挑战。为了安全、持续地开发和利用外层空间资源,有效遏制空间碎片密度快速上升、碰撞风险日益加剧的趋势,在采取钝化、系留、离轨等任务后处理 (post-mission disposal,PMD)措施以减缓空间碎片产生的同时,还有必要设法移除轨道上已存在的空间碎片。空间碎片主动移除技术作为空间环境治理的必然选择,日益受到各航天大国的高度关注。
2 国外研究情况
对于废弃卫星或火箭末级/上面级等大尺寸的空间碎片,倾向于先使用机械臂、飞网或鱼叉等装置主动捕获空间目标,随后通过离轨手段将其转移离开当前轨道的方法。对于小型空间碎片,可以采用非接触式移除方法,如激光推移、离子束推移等方式。
最近几年,国外已完成多次以空间碎片移除技术为代表的在轨操作演示验证试验,或正在实施在轨演示试验的计划。
2.1 捕获移除方式
2018年6月,欧洲 “空间碎片移除” (RemoveDEBRIS)任务试验卫星完成在国际空间站的部署。2018年9月至2019年3月,该任务陆续成功完成了真实太空环境下飞网捕获立方星、空间目标运动跟踪、鱼叉捕获、拖曳帆离轨等4项技术在轨验证试验。“RemoveDEBRIS”的实施加速了空间碎片移除技术的实用化进程[3,4]。
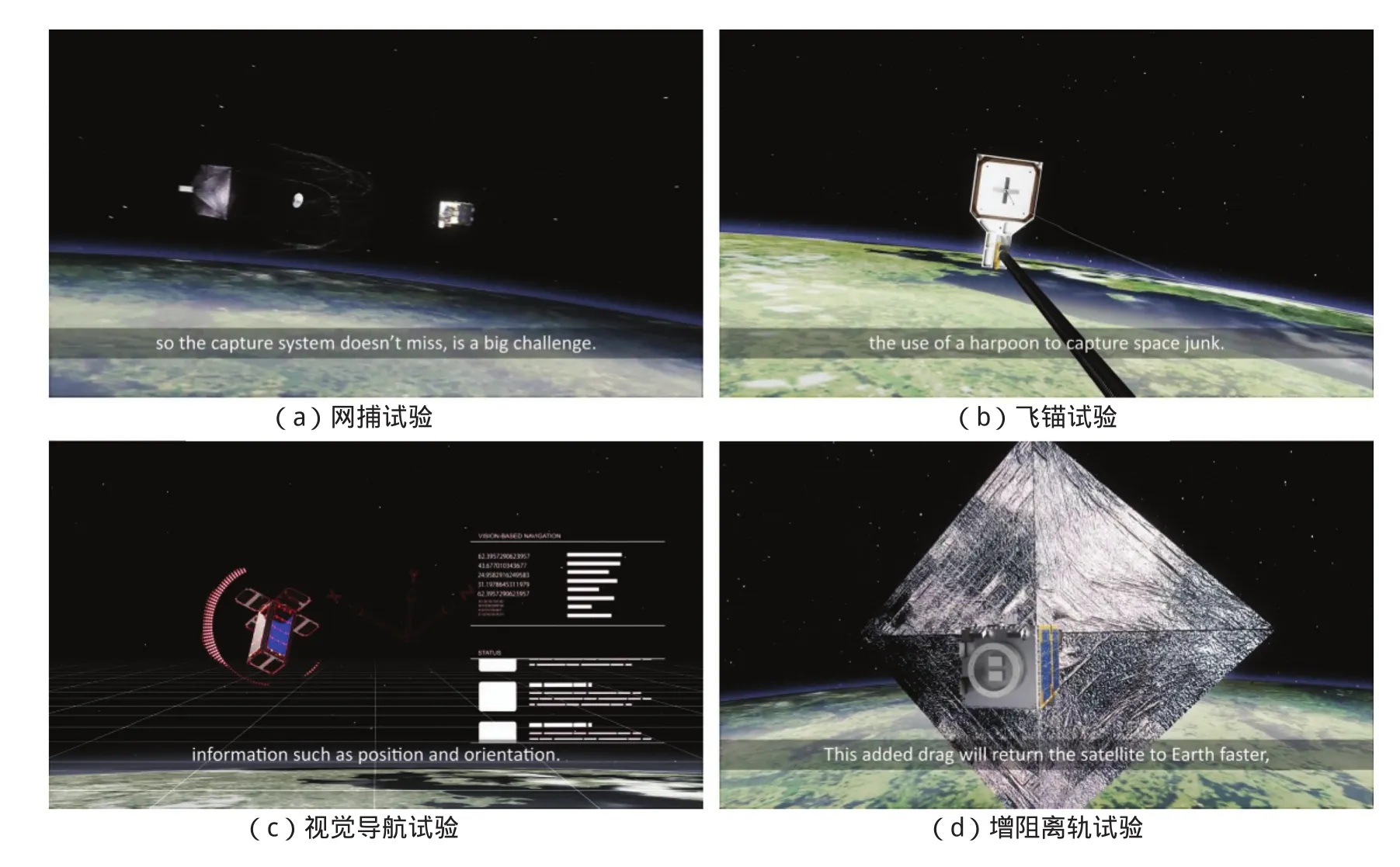
图1 RemoveDEBRIS任务在轨试验Fig.1 On-orbit test of RemoveDEBRIS
欧空局 (ESA)将于2023年发射 “e.Deorbit”航天器,验证针对大型报废卫星的移除技术。“e.Deorbit”任务于2012年启动,目标是移除800~1000km太阳同步轨道和极轨道上已停用的“欧洲环境卫星” (Envisat),该卫星展开宽度为26m,重约8.2t。拟采用的主动移除方案包括:机械臂、触须、飞网、离子束等,如图2所示。
瑞士企业ClearSpace公司与ESA在2019年签订了一份合同,计划开展一项碎片移除卫星项目,如图3所示。该项目计划在2025年发射,旨在移除2013年 “织女星”(Vega)火箭发射时遗留在轨道上的一个适配器,该适配器重约100kg,目前在800km×660km的轨道高度上。
2020年初,成立于2013年的日本宇宙尺度公司 (Astroscale)拿下了日本宇宙航空研究开发机构 (JAXA)的碎片移除合同。JAXA的商业碎片移除演示项目 (CRD2)包括两个阶段,目前Astroscale拿下了第一阶段的合同。该阶段是在2023年3月31日前,发射一颗演示卫星,该卫星要逼近日本H-II A火箭的上面级,逼近上面级之后进行悬停、绕飞等操作,获取一些近距离监视数据,如图4所示。第二阶段的完成时间节点为2026年3月31日,主要完成对火箭上面级的对接,并加速其离轨再入大气层。该公司还开发了一颗名为ELSA-d的卫星来清理轨道碎片,计划于2020年初由联盟号火箭发射。该星由目标飞行器和轨道交会机动飞行器两部分组成,用于演示交会和近距离作业。

图2 拟采用的空间碎片捕获及移除技术方案示意图Fig.2 Schematic diagram of space debris capture and removal technologies to be used

图3 ClearSpace在轨试验动画Fig.3 On-orbit experiment animation of ClearSpace
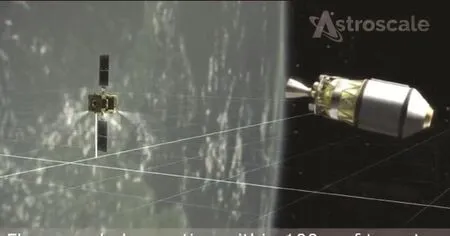
图4 CRD2任务对上面级绕飞操作Fig.4 Flying around an upper stage of CDR2 mission
2.2 其它移除方式
除了传统的捕获方式外,国外还提出了很多新型空间碎片移除手段。
(1)电动力绳系离轨。ESA最先提出这种清理方法,这种清理方法以电动力绳系 (EDT)卫星为基础,通过其电动力缆绳释放捕获器对非合作目标实施准确、可靠捕获,之后利用电动力绳系切割磁感应线产生电动力使EDT卫星与目标形成的组合体逐渐降轨,再入大气层烧毁。2016年12月13日,日本发射的HTV货运飞船携带了一套电动力绳系的原型机,原计划在太空释放系绳以对该电动力绳系技术进行在轨测试,被称为“鹳号集成系绳试验” (KITE),但最终试验未能完成向太空抛出金属缆绳这一最重要的步骤而宣告失败。
(2)激光推移离轨。使用激光推移空间碎片有两种方法:第一种主要用来清理微小型空间碎片,利用激光光束能量极高的特点,直接高能连续光波冲击碎片,将碎片焚毁,完成任务;而第二种方法则是面向稍大一些尺寸的空间碎片,利用高能脉冲在碎片表面照射产生“物质燃烧流动推力”,利用推力改变空间碎片的运行轨道,实现降轨后再入大气层。这两种方法一个是利用连续波激光产生巨大能量,另一个利用高能脉冲激光产生推力。最具代表性的是1996年由美国空军和NASA联合提出的Orion计划,拟移除1500 km轨道范围内的厘米级碎片[5]。
3 我国研究情况
近年来,我国也在加强对空间碎片主动移除技术的攻关研究。在 “空间碎片专项”的支持下,开展了空间碎片减缓及移除技术研究并取得了丰硕的成果。
(1)空间碎片主动移除关键技术取得重大突破。“十一五”以来,空间碎片主动移除所涉及的空间碎片非合作目标测量、识别与操作技术、新型抓捕装置设计等一系列关键技术得以攻克;针对不同轨道、不同尺寸的空间碎片,得到了可行的空间碎片移除方案;研制了原理样机并完成了许多具有高显示度的地面集成验证试验,有力地提升了我国空间碎片主动移除技术水平,为空间碎片移除工程应用奠定了技术基础。
(2)空间碎片主动移除技术飞行演示验证试验取得圆满成功。2016年6月25日,我国自主研制的 “遨龙一号”空间碎片主动清除飞行器搭载长征七号火箭发射升空。飞行器以自由漂浮空间碎片模拟器为目标,开展了空间碎片非合作目标探测、识别、跟踪与操作等在轨试验并获得圆满成功,这是我国乃至国际上首次针对空间碎片目标的主动清除关键技术在轨验证。近两年,我国也多次开展了针对小卫星的离轨帆技术在轨试验验证。
(3)注重前沿技术应用,探索新概念空间碎片移除手段。我国从创新性、实用性和灵活性的角度出发,开展了空间碎片移除前沿技术研究,探索了飞网捕获、激光移除碎片、电动力绳系离轨等移除新概念,此外也开展了空间碎片再入预报、空间碎片减缓效果评估等相关技术研究,推动了空间碎片移除领域的可持续发展。
4 空间碎片主动移除领域发展趋势
空间碎片主动移除领域呈现如下发展趋势:
(1)移除方式多样化。根据特定轨道高度范围、特定尺寸范围的空间碎片,可以选择空间碎片主动移除方式。相对来说,臂杆捕获移除方式技术成熟度高,是空间碎片移除工程应用近期可实现的理想方式。瞄准中长期发展,飞网捕获、鱼叉捕获、可附着离轨装置、激光移除、电动力绳索等新概念碎片清理技术也在逐步开展论证或研制。
(2)空间碎片主动移除技术正由概念设想逐步走向关键技术验证和工程应用。2016年以来,我国完成了以 “遨龙一号”为代表的空间碎片主动移除技术飞行试验,完成了针对小卫星的增阻帆离轨在轨试验,欧洲完成了以 “RemoveDEBRIS”任务为代表的在轨试验,这些试验的成功开展为后续空间碎片移除工程应用打下了良好的基础。
(3)研究主体多样化。除了欧空局 (ESA)、美国国防高级研究计划局 (DARPA)、美国国家航空航天局 (NASA)等政府研究机构外,还涌现出许多商业公司计划从事空间碎片移除服务。如日本的宇宙尺度公司 (Astroscale)计划为H-2A火箭末级实施捕获离轨,美国的诺瓦克斯公司(NovaWurks)计划通过网状结构捕获失效卫星并对其进行重新利用,英国有效空间解决方案公司(Effective Space Solutions)计划发射微小卫星捕获空间碎片,并将其拖曳至弃星轨道。未来,空间碎片移除无疑是一项有着良好前景的产业,其商业化运行势在必行。
5 关键技术分析
对于针对大尺寸目标的捕获移除方式,主要涉及的关键技术如下:
(1)高动态非合作目标消旋技术。由于空间碎片可能处于高速自旋或翻滚状态,具有不可控特性,目标复杂的运动增加了目标的抓捕难度。对于刚性捕获来说,如果不在捕获前对目标实施消旋操作及稳定控制,在抓捕时极有可能会对捕获装置造成损伤。柔性接触式缓冲消旋、非接触式电磁消旋等技术,正在成为重要的研究方向。
(2)柔性/软体自适应碎片捕获技术。刚性捕获可能会造成一定的冲击和破坏,采用柔性/软体、智能变形材料等制成的捕获装置可根据目标的尺寸、运动状态等进行自适应调整,可实现无损无伤捕获,并且不会产生新的碎片。
(3)飞行器自适应控制技术。完成空间碎片捕获后,组合体可能具有残余角速度,需要进行快速的姿态稳定控制。而组合体质心位置、转动惯量等质量特性未知,需要进行在线辨识,以满足稳定控制需求。另外,组合体离轨时,主发动机推力线可能不通过组合体质心,且偏差较大,需要采用合理的控制策略有效解决此问题,实现飞行器的自适应稳定控制。
(4)空间碎片接近与导航制导技术。空间碎片的非合作特性使得飞行器接近过程中信息无法共享,传统制导方案在此条件下鲁棒性较差。另外,失效卫星或任务后火箭末级本身不具备姿态控制能力,这就提高了对目标探测的指向要求。因此需要开展空间碎片接近与导航制导技术研究,为空间碎片接近、绕飞与停靠任务提供技术支撑。
(5)翻滚目标运动特性分析与预测技术。任务后卫星或火箭末级/上面级在正常寿命终止或意外失控失效后,均会持续受到外界干扰,如太阳光压、重力梯度等。在外力矩的作用下,会产生绕质心旋转的运动,由于其转动惯量分布不会三轴完全一致,并且存在着能量耗散,经过长期演化会伴随有进动和章动运动。这些对于空间碎片主动移除构成了很大的挑战,开展翻滚目标运动特性分析与预测至关重要,可为空间碎片主动移除提供信息引导输入。
(6)翻滚目标捕获地面试验验证技术。与空间在轨任务相比,地面验证试验需要解决轨道动力学模拟、空间与地面天地一致性、位姿六自由度运动耦合等问题,特别是针对翻滚目标,具有运动状态模拟难度大、相对速度与距离跨度大、跟踪停靠精度要求高等特点,需要综合采用多种技术途径应用虚实结合的试验方式解决问题。
除此之外,其它移除方式涉及的关键技术,也值得关注与研究。
激光推移清除需要解决的关键技术主要有:(1)激光烧蚀驱动空间碎片力学行为分析。(2)高能量激光光束产生技术。(3)高精度跟瞄技术[6]。
充气增阻移除需要解决的关键技术包括:(1)充气结构材料制备技术。(2)充气结构自刚化技术。(3)充气结构折叠技术。
电动力绳系离轨移除需解决的关键技术包括:(1)长时存活绳系结构设计。(2)存储释放装置设计。(3)空间电荷交换技术。
6 建议
(1)形成空间碎片治理的有效机制,推动空间碎片治理国际合作。外层空间是人类的共同资源,空间碎片治理关乎全人类利益。为了更好地应对空间碎片这一全球性挑战,各国需要协调和管理自身利益诉求,共同维护全球公共利益。充分重视联合国和平利用外层空间委员会 (COPUOS)的作用,在相关国际规则和框架下,积极寻求与开展国际合作,加强信息和技术共享,为更好地保护空间环境、实现空间开发和利用的可持续性发展贡献中国力量。
(2)空间碎片治理应从国家层面出发,加强顶层规划,统筹长远发展。空间碎片环境治理技术正处于一个加速发展的历史机遇期,美国、日本、欧空局等国家或组织已制定了明确的技术演示验证计划,我国也需要开展空间碎片减缓与移除领域规划论证,从顶层制定空间碎片减缓近、中、远期技术发展路线,有计划、有步骤地实施空间碎片移除在轨演示验证计划,不断提升技术成熟度,并逐步推动工程化应用和实施。
(3)寻求技术途径的多样化,推动空间碎片治理产业化发展。目前空间碎片环境态势日益严峻,空间碎片移除将面临潜在的巨大的商业市场需求。建立适合我国的空间碎片治理体系,鼓励并指导社会资本参与空间碎片治理,共同推动空间碎片治理产业化发展。探求多样化的空间碎片环境治理技术手段,促进空间碎片移除商业化运营。