基于细化分割的遥感影像水体边缘轮廓提取
2020-09-15王佳欣窦小磊
王佳欣,窦小磊
(河南工程学院 计算机学院,河南 郑州 451191)
随着遥感图像处理技术的发展,可采用高分辨率的遥感图像识别技术进行水体资源分析,建立高分辨率遥感水陆场景图像模型,结合对地表湖泊、人工蓄水库影像资料的分析,建立高分辨率遥感水陆场景图像特征分割模型,以获取地表的水体资源信息。通过对地表水体边缘轮廓进行提取,经过高分辨率遥感影像水体特征分析,能够在更大程度上实现对地表水资源的保护和建设,相关的遥感影像水体边缘轮廓提取和识别方法受到了人们的极大重视[1-2]。
对遥感影像水体边缘轮廓提取建立在图像的信息增强和特征分割基础上。采用像素信息增强方法,通过灰度像素特征分析技术,实现对遥感影像水体边缘轮廓的提取和优化分割。传统方法主要有局部二值分割方法、小波多尺度特征分割方法和灰度像素特征分解方法等[3]。文献[4]提出了基于局部二值模式的遥感影像水体边缘轮廓提取方法,实现了局部区域遥感监测下的水体资源分割,但该方法在进行水陆边界分割时模糊度较大,算法的快速收敛性不好。文献[5]提出了基于形态学滤波抑制的遥感影像水体边缘提取方法,基于颜色特征进行水陆分离,该方法仅能反映水体的局部灰度分布特征。文献[6]提出了基于纹理特征的水体和陆地分割方法,水体和陆地的灰度化图像差别较大,特征分割的精度不高。
针对上述问题,本研究提出了基于细化分割的遥感影像水体边缘轮廓提取识别方法,采用卫星遥感技术进行高分辨率遥感水陆场景成像,采用形态学滤波方法进行遥感影像水体边缘轮廓检测过程中的细化分割和滤波,对水陆粗分离结果进行形态学闭运算处理以实现遥感影像水体边缘轮廓提取,最后进行仿真测试,展示了本方法的优越性能。
1 遥感水陆场景图像成像和增强处理
1.1 遥感水陆场景成像处理
用灰度像素增强技术进行高分辨率遥感水陆场景图像像素点的特征检测,基于纹理特征进行水陆场景图像检测,结合灰度化的像素特征分解方法[7],得到高分辨率遥感水陆场景图像的模糊关联特征量为
rk(1)=0,v=1,v(1)=0,p∈P,v=1。
(1)
根据水体和陆地的灰度化图像检测方法,得到遥感水陆场景图像的像素特征分析模型,在深度光照强度分布环境下进行图像增强处理,提取图像的模糊隶属度函数,得到高分辨率遥感水陆场景图像的多种纹理特征值为
(2)
通过纹理特征差异检测方法,进行图像的优化检测和边缘区域权重聚类[8],得到高分辨率遥感水陆场景图像的模糊相关性特征量为
(3)
采用形态学滤波方法,提取图像的模糊度特征量,根据卫星遥感监测方法进行边缘轮廓检测。采用单帧向量融合方法,得到高分辨率遥感水陆场景图像的模糊度函数为
(4)
基于模糊粗糙集理论,进行图像的优化分割和信息采集,采用模糊信息融合检测方法[9]进行显著性检测,得到高分辨率遥感水陆场景图像的灰度像素分布矩阵为
(5)
用Retinex算法进行图像信息重构,结合模糊信息检测方法,建立高分辨率遥感水陆场景图像的超分辨率融合模型。
1.2 高分辨率遥感水陆场景图像增强处理
在不同场景纹理中进行遥感影像空间像素特征重构,以中心像素的灰度值为阈值建立遥感影像陆地地物的空间结构特征辨识模型,采用小波域分块特征匹配方法[10],得到高分辨率遥感水陆场景图像的水陆场景样本分布集为
ikl(z)=bml(gkl·z+fkl),
(6)
式中:l=1,2,…,R,并且k≠l。 使用超平面作为决策边界,对高分辨率遥感水陆场景图像进行亮区域权重匹配,得到空间自适应参数为
(7)
对影像进行水体特征检测,然后进行增强处理,得到遥感水陆场景图像的灰度特征量为
bnrβ(X)=RβX-RβX1。
(8)
构建图像的模糊度检测模型,构建遥感水陆场景图像数据集,得到水陆粗分离结果为
Gnew=(1+μT)(1+λT)Gold,
(9)
(10)
式中:Gnew和Gold分别表示高分辨率遥感水陆场景图像粗略区域的新、旧预测标签值。
在式(7)的基础上,通过灰度像素增强技术进行遥感影像空间分辨率增强处理,在不同场景纹理中进行遥感影像空间像素特征重构[11]:
(11)
式中:TC为高分辨率遥感水陆场景图像的尺度特征分解式;Md(Ci)表示Ci中纹理信息分量。
2 遥感影像水体边缘轮廓提取
2.1 遥感影像的水体边界点分割
在构建高分辨率遥感水陆场景图像视觉采样模型的基础上,采用模糊视觉信息重构方法进行检测。模糊信息重构建立在卫星遥感图像灰度统计信息的基础上,加入图像的梯度信息,分别构造以高斯函数为核函数的局部二值灰度拟合模型进行信息重构和特征提取,实现对图像模糊特征信息的重组。计算粗略区域的预测标签值,得到高分辨率遥感水陆场景图像的暗区域特征分量为
Mi, j=med(…,Xi-1, j-1,Xi, j,Xi+1, j+1,…),
(12)
(13)
建立高分辨率遥感水陆场景图像的超分辨率重建模型,分析遥感影像的自适应寻优模型,得到高分辨率遥感水陆场景图像像素空间聚类分布值为
(14)
构造相似度特征分辨模型,结合边缘轮廓特征检测方法进行图像的景深重建,得到图像的边缘像素集为M×N。采用多模态特征分解方法,得到高分辨率遥感水陆场景图像,图像边缘状态特征分布集为
(15)
式中:η表示高分辨率遥感水陆场景图像的分块匹配量化集;φ表示稀疏特征分量;R表示高分辨率遥感水陆场景图像的模板匹配系数。
采用细化分割方法进行遥感影像的水体边界点分割处理。假定待分割图像的边缘轮廓被分为内部和外部两个同质区域(即目标和背景),可通过二值图像来逼近。假设定义域为Ω的灰度图像I(x,y)被轮廓曲线C划分为互不重叠的两个区域R1和R2,通过最小化能量Ecv来获得图像的分割轮廓线,引入一个核函数用以定义局部二值拟合能量函数进行细化分割,构建高分辨率遥感水陆场景图像的多维直方图结构模型,采用边缘轮廓检测方法,得到高分辨率遥感水陆场景最邻近的k个样本像素特征量为
s(k)=φ·s(k-1)+w(k),
(16)
(17)
提取高分辨率遥感水陆场景图像的空间视觉特征分布值,计算图像分割的R、G、B分量,基于 KNN 的水陆区域粗分离方法,在不同场景纹理中进行遥感影像空间像素特征重构。以中心像素的灰度值为阈值建立遥感影像陆地地物的空间结构特征辨识模型,实现遥感影像的水体边界点分割[12]。
2.2 遥感影像水体边缘轮廓检测
(18)
式中:r和θ为每个细致分区的水体边缘轮廓分布系数。当相关性变量满足ηm(x,y)∈{-1,0,1}时,采用重叠粗略分区的方法,得到高分辨率遥感水陆场景分区特征分量为
(19)
式中:r为高分辨率遥感水陆场景图像纹理特征匹配值,0≤r≤1。计算测试图像每个粗略分区区域块半径ri内的LBP特征,采用形态学滤波方法进行遥感影像水体边缘轮廓检测过程中的细化分割和滤波,对水陆粗分离结果进行形态学闭运算处理,得出边缘轮廓特征分布为
(20)
(21)
式中:c、r分别为高分辨率遥感水陆场景图像灰度像素分布的列数和行数。根据细化分割结果进行水体边界平滑处理,实现了对遥感影像水体边缘轮廓的提取。
3 仿真实验与结果分析
为了验证本方法在遥感影像水体边缘轮廓特征提取中的应用性能,进行实验分析。采用MATLAB 2016a仿真工具进行程序设计,测试样本集来自 Google Earth卫星地图2019年的遥感影像,给出训练图像的大小为2 000 mm×2 000 mm,水体边界平滑系数为0.83,遥感影像的粗分系数为0.45,对3组测试样本采用本方法得到的测试结果如图1、图2和图3所示。

图1 遥感影像测试样本1Fig.1 Remote sensing image test sample 1

图2 遥感影像测试样本2Fig.2 Remote sensing image test sample 2

图3 遥感影像测试样本3Fig.3 Remote sensing image test sample 3
分析上述仿真结果得知,采用本方法能有效实现对遥感影像水体边缘轮廓的提取,水体边界平滑性较好,轮廓特征的辨识度较高。测试输出的峰值信噪比越高,遥感影像水体边缘轮廓提取的精度越高,得到的对比结果如图4所示。分析图4得知,使用本方法进行遥感影像水体边缘轮廓提取的峰值信噪比较高。
以文献[4]和文献[6]为例,测试用不同方法进行遥感影像水体边缘轮廓提取的准确率,得到的对比结果见表1。分析表1得知,使用本方法进行遥感影像水体边缘轮廓提取的准确率较高。

图4 峰值信噪比对比Fig.4 Comparison of peak SNR
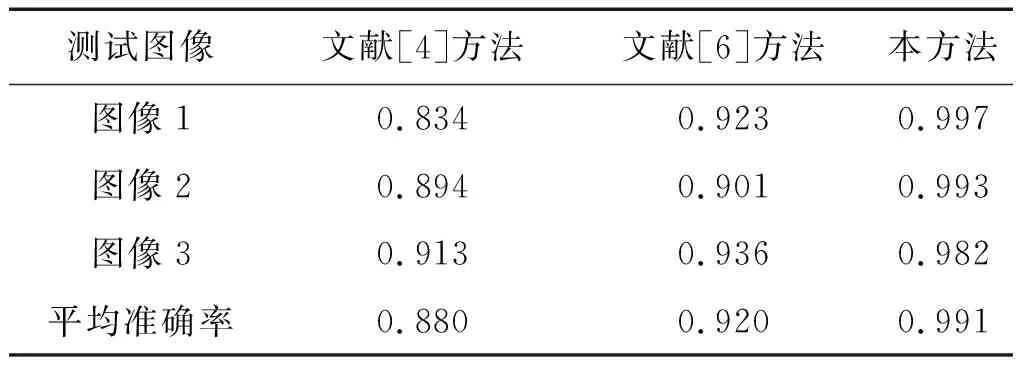
测试图像文献[4]方法文献[6]方法本方法图像10.8340.9230.997图像20.8940.9010.993图像30.9130.9360.982平均准确率0.8800.9200.991
4 结语
本研究提出了基于细化分割的遥感影像水体边缘轮廓提取识别方法。以中心像素的灰度值为阈值建立遥感影像陆地地物的空间结构特征辨识模型,对影像进行水体特征检测,通过灰度像素增强技术进行遥感影像空间分辨率增强处理,建立高分辨率遥感水陆场景图像的超分辨率重建模型,采用重叠粗略分区的方法,得到水陆场景分区特征,根据细化分割结果进行水体边界平滑处理,实现了对遥感影像水体边缘轮廓的提取。通过仿真实验可知,采用本方法进行遥感图像水体分割的边界平滑性较好,特征提取精度较高。