浅地表电磁探测中的匹配滤波技术应用
2020-09-14周逢道王绪磊
周逢道, 王绪磊
(吉林大学a. 仪器科学与电气工程学院;b. 国家地球物理探测仪器工程技术研究中心,长春130061)
0 引 言
在浅地表电磁探测中,频率域电磁探测法具有高效、可控的优点,得到了广泛应用。其探测原理是利用涡流效应,使用发射线圈向周围发射一次场,通过接收线圈接收地下金属目标激发的二次场,以二次场的变化情况来识别地下金属目标的方法[1-2]。在实际应用中,为提高探测效率,通常采用多组收发线圈同时工作,同步收发的模式[3-5]。这种模式增加了系统的单次探测面积,可以快速采集大量的二次场信息,在大大提高探测系统工作效率的同时,也增加了系统进行数据处理所占用的时间,降低了系统的时效性[6]。而浅地表电磁探测实际应用中又对实时性有着极高的要求,因此,一种高效快速的数据处理系统显得尤为必要。
在整个电磁探测系统的数据处理系统中,需要对采集的二次场信息进行数据的处理与分析,其过程包括对模拟信号的滤波与放大、AD 转换、数字滤波等,然后判定所得的二次场信息中是否含有金属目标信号,实时反馈给控制系统。这其中,数字滤波主要对AD转换后的数字信号进行滤波与分析,直接影响了地下目标物的判定,是极其重要的一个环节。数字滤波能够克服随机误差,提高信号质量,为金属目标的识别提供更加可靠的判据。相较传统的模拟滤波器,数字滤波器具有响应速度快、精度高、稳定性好和可靠性高的优点,它通过软件实现,不需要搭建模拟电路,避免了阻抗匹配的问题[7],降低了电路的复杂性和仪表的设计成本[8],是浅地表电磁探测系统的重要一环。
本文的数字滤波算法依托吉林大学研制的浅地表电磁探测系统实现,系统的天线部分采用阵列式设计的方案,每组发射线圈对应多组接收线圈,可根据探测面积的大小增加或减少线圈组数。
1 数字滤波原理及其建模
图1 为系统控制单个模块的工作框图,采用FPGA + DSP + 计算机的模块化设计,每个模块采用FPGA + DSP的硬件架构实现对接收天线数据的采集与处理,通过网口与计算机完成通信,最终由上位机进行匹配滤波对噪声进行压制,提升所获信号的信噪比,完成目标物的识别与定位。
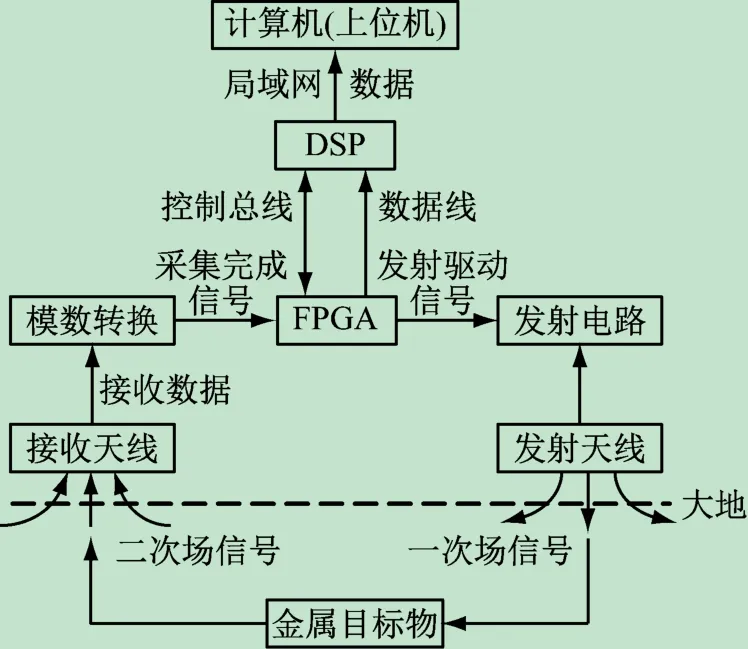
图1 单模块设计框图
1.1 匹配滤波的概念
匹配滤波是利用已知信号的特征进行检测的一种滤波方法。当滤波器的输入信号是某一类特定波形时,使输出信噪比达到最大的滤波方式即为匹配滤波。
在一个匹配滤波器中,设其线性输入信号由有用信号和噪声两部分构成,即:
式中:K为归一化常数。由式(3)可知,滤波函数h(t)是输入信号s(t)的镜像函数,匹配滤波过程就是信号相关的过程,滤波函数与目标函数的相似性越大,滤波效果越好,滤得信号的信噪比越高。
1.2 目标函数建模
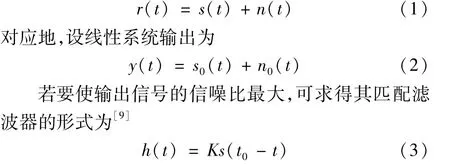
本文中浅地表电磁探测系统车载工作,天线悬空放置于车辆前端进行电磁波的发射与接收,控制系统和计算机放置在车体内部。车辆行进时,整个系统实时探测,能够对当前位置处的金属目标物进行识别并报警。当车速为3 km/ h(0. 83 m/ s)时系统能够探测到深度50 cm以内,半径为15 cm,高8 cm的圆柱异常体。本文所采用的天线结构如图2 所示。由于天线为阵列式设计,可以根据探测宽度的需要增加接收线圈的组数和发射天线的面积。天线采用一发五收的设计,最外围是发射线圈,为了增大发射磁矩,发射线圈常用大电流设计,其面积也较大,内部的接收线圈采用八字型设计,以抵消一次场的干扰。接收线圈采用严格的对称式分布,位于发射线圈中心位置,每个接收线圈上下侧边缘位于发射线圈1 / 4 宽度处,采用平衡差动的方式接入电路[10-12]。当探测区域无金属目标物时,接收线圈感应的电动势为0。
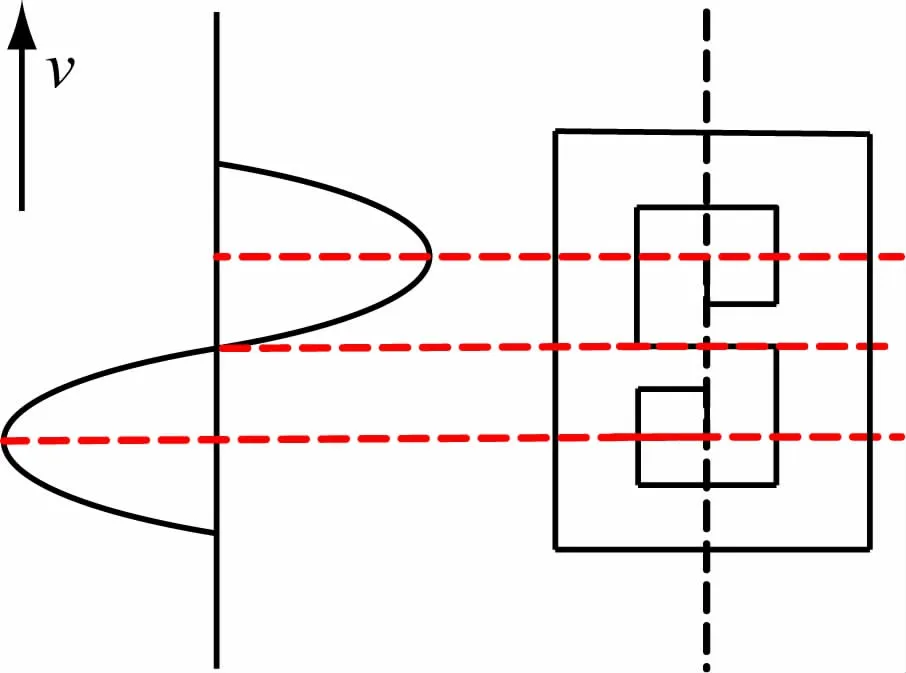
图2 探测天线示意图
图3 天线磁场计算示意图
为了获得目标物在天线探测时的响应函数,从而获得良好的滤波函数,对天线周围的磁场分布进行分析。如图3 所示,以矩形发射线圈ABCD 的中心点O为坐标原点,构建空间坐标系。r为目标物与z轴距离(y坐标),d为目标物深度(z坐标)。
由于八字形线圈的结构可以抵消掉发射线圈发出的一次场,避免了一次场对接收线圈的干扰,所以本文不再对其进行计算,只考虑接收线圈周围出现金属目标物时其二次场的分布情况。在分析涡流形成的二次场时,把圆柱体金属目标物等效为半径b 的多组圆环体,等效之后的圆环体和发射线圈之间的距离是d,涡流是It。根据磁偶极子的磁通密度计算公式,可以得到:

式中,μ0为真空磁导率。同样深度情况下,天线正下方涡流It可近似认为相等。由式(4)可知,同一材料在同一深度激发的二次场强度与r的平方成正比。则由图2,当天线随车体以速度v经过金属目标上方时,接收线圈采集的二次场信号经模数转换后,将特征值按时间排列,会得到一条类似正弦的曲线。分析可得,目标波形的周期随天线运动速度变化而变化,速度越快,天线经过目标物的时间越短,目标波形周期越短。目标波形峰峰值受目标物金属含量和所埋深度有关,目标物金属含量越高,二次场越强,峰峰值越大;同一目标,距离天线位置越近,激发的二次场越强,峰峰值越大。
实验室环境下,单一背景探测所得的曲线也验证了这一结论。由图4 可知,采集数据在时间轴上排列呈正弦趋势。经计算,实验波形与正弦波有较好的相关性,又由于正弦波具有表达式简单,便于离散化的优点,可以提高数字滤波的计算速度,在处理大量数据时也不会影响系统的实时性,很好地满足了本系统对探测效率的要求。故本文采用正弦波作为滤波函数对所得信号进行匹配滤波。
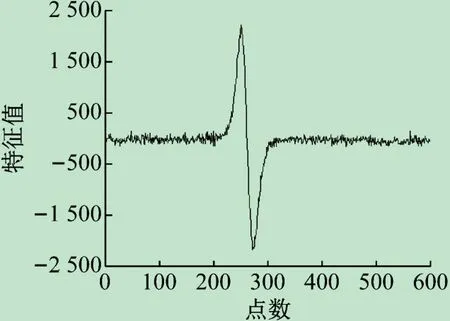
图4 单模块测试的特征分量曲线图
2 滤波器设计与实现
2.1 匹配滤波器的设计
匹配滤波算法流程如图5 所示。由于所采用的滤波函数为连续的正弦函数,而系统采集到的二次场信息为离散的点,需要对滤波函数离散化,进行取插值。对于系统采集到二次场数据,受实际条件限制,车体在行驶过程中不能始终保持理想的匀速状态,而采集到的数据按时间进行排列后,金属目标的响应波形其周期随速度快慢变化明显。而匹配滤波要求目标波形与滤波窗口函数有尽可能高的相似性[15],而变化的目标函数显然与这一原则相违背。

图5 匹配滤波算法流程
为了削弱行进速度对目标波形的影响,对天线行进速度进行归一化处理,将滤波时横坐标的时间转化为天线的行进距离。按照距离排列的二次场信息,目标波形周期只与金属目标横截面积大小有关而与速度无关,由此消除速度对滤波效果的影响。获取距离信息的方法有两种:①读取时间信息的同时实时读取速度信息,两者进行积分,将时间转换为距离信息,以距离为横轴,特征值为纵轴对二次场特征值进行排列,进行匹配滤波;②增加硬件,在读取小车行进时间的同时,使用编码器对小车的行进距离进行记录,通过解码器直接读取距离信息进行滤波。由于第①种方法会增加算法的执行时间,且随着数据量的增加,严重拖慢滤波效率,而浅地表实际探测时需要在短时间内处理大量的数据信息,对系统的实时性有极高的要求。故采取第②种方法。
在探测过程中,由于天线行进快慢不同,可能导致速度较慢时,在一个位置处采得多组特征值的情况。此时,应对同一距离的多组特征值进行取平均,同时舍弃差异较大的个别特征值,消除随机误差。
将特征值取平均后,按照距离进行重新排列,记距离为x1,对应特征值y1,得到二次场特征值随距离分布的数组X( n )= ( xi,yi)( i =1,2,…,n )。设滤波函数的窗口宽度为d,即h(n)取d 个插值,则X(n)中每d个点为一组序列(第1 个点到第d个点为第一组序列,第2 个点到第d + 1 个点为第二组序列……),依次迭代,共有序列组数
将点x(1)对应距离记为y(1)距离,x(2)对应距离记为y(2)距离……x(m)对应距离记为与y(m)对应距离。将距离与其对应的滤波后特征值重新排列,可得到匹配滤波后数组

和滤波前序列X(n)相比,z(n)少了d - 1 个点。在实际探测中,本文所使用的编码器每0. 03 m上报一次距离信息给上位机。因此滤波后的序列坐标原点对应实际行进距离的坐标

故在实际探测过程中,需以探测天线行进δ 处为距离坐标的原点。在工程应用中,根据实时性的要求,一般所取窗口宽度在200 ~300 范围内,对应空采距离为6~9 m,并不影响实际探测效率和结果。
2.2 目标识别与定位
为对目标物进行进一步的识别与定位,需要对式(10)的z(i)进一步处理。经实验室环境验证,本文所使用目标物在50 cm 处响应特征值约为1 000。设置目标物判别阈值P =400。若有多个连续点(5 个及以上)对应z(i)大于P,则认为此处存在金属目标。

由于匹配滤波可以消除随机误差的干扰,所以可以认为z(i)序列中没有随机误差。此时,若z(i)满足y(i)>400 且则认为该点是极值点,对应坐标为该目标物中心位置,记录此时距离信息,上位机进行报警,并上报此时距离信息与天线所在位置编号,完成目标物定位。
3 实验验证
在实验室环境下进行匹配滤波效果的实验验证,实验中采用半径15 cm,高5 cm的圆柱体金属,埋藏在地表下距离天线20 cm的位置。使车载天线向前匀速运动,经过金属目标正上方。将得到的数据按照距离排列,如图6 所示。由于数据量较大,选取其部分进行分析。
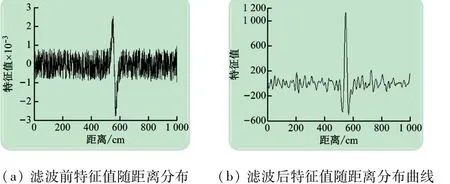
图6 滤波前后数据对比
分析数据可知,滤波前的目标信号波形较粗糙,毛刺明显,且本底噪声干扰严重,整体信噪比较低。经匹配滤波后,对本底噪声压制作用明显,目标波形从类正弦信号变成一个主瓣两个旁瓣的目标信号,且目标信号能量最大的中心点与滤波前保持一致,不影响滤波前后的位置判决。整个波形的信噪比得到了明显提升,印证了匹配滤波对信噪比的提升作用。
4 结 语
本文提出了一种基于匹配滤波的目标识别方法,对目标信号进行建模、累加、插值等方法,获取匹配滤波的窗函数。通过对原始数据的匹配滤波结果进行能量分析,最终进行目标物的识别与定位。经实验验证,得到以下结论:
(1)本文所提出的匹配滤波方法可以有效压制噪声,提高所得信号的信噪比。
(2)匹配滤波后的数据能量中心点与原始数据保持一致,为目标物的识别提供了更加优良的判据,是一种简便高效的数据处理方式。
