基于演化计算修正的神经网络故障预测方法
2020-09-14屈重年刘旭焱
李 果, 屈重年, 刘旭焱, 刘 伟, 杜 军
(1. 南阳师范学院机电工程学院,河南南阳473061;2. 空军工程大学航空工程学院,西安710038)
0 引 言
目前,对于故障预测的方法主要有参数模型法和非参数模型法两大类。参数模型法需要利用被测系统的特性建立数学模型,由于信息种类和数量的原因,利用多源信息对被测系统建模存在一定的困难。对于反映同一设备的多源信息来说,经常多个模式之间有不同程度的状态交叉。例如在某型发动机故障诊断过程中,“发动机超转”和“发动机超温”均表现为发动机转速和排气温度不同程度的异常;从模糊集合论的观点来看,这两类模式之间相互交叉,如果仅用常规的信号分析处理方法进行故障诊断,就会存在一定程度的误判。同样在故障状态预测时同样会因为此类问题造成预测效率的下降。
神经网络网络模型存在缺陷和不足,如学习速度慢,灾变性失忆及识别精度低等。但神经网络具有很强的容错性,对小样本多元数据中含糊、不确定、有假象的复杂情况可以通过不断学习做出合理的判断决策[1-4]。对于小样本数据,由于样本量不足导致预测结果存在以下问题:①预测结果对每个既定故障模式的预测概率比较接近,这是由于故障预测是以当前状态估计未来状态,当前状态有时候会存在一定的不确定性,造成了预测结果的不确定性。②预测的结果和最终的故障模式可能会存在不一致。这是因为故障的发生不仅由故障发生前的状态决定,而且还和状态的演化速度有关。目前有很多研究在故障诊断领域多采用各种算法对当前状态进行判别[5-9],取得了良好的效果。但对于故障预测来说,必须对于当前状态进行趋势分析,增强预测结果的准确性,而多信息源在故障诊断和预测时,特别对于小样本信息通常具有更好的效果[10-11]。
本文利用数据和音频多源信息,通过改进神经网络的训练算法,在得到初步预测结果的基础上,提出状态趋势演化计算方法。引入演化计算修正函数对预测结果进行二次修正,从而得到更为准确的预测结果。
1 初级概率预测器设计
1.1 神经网络算法模型
1.1.1 神经网络拓扑结构设计
选择BP 神经网络为基本模型,节点组进行伪模糊化变换(指参照常用的隶属度函数,根据融合需要自定义隶属度函数f(·),进行相应的运算的过程)。输出的为表征状态变化态势的模糊矢量,再将模糊矢量作为神经网络的输入矢量。网络输出为预测概率。
仿照高斯形隶属度函数进行伪隶属度函数的构造,
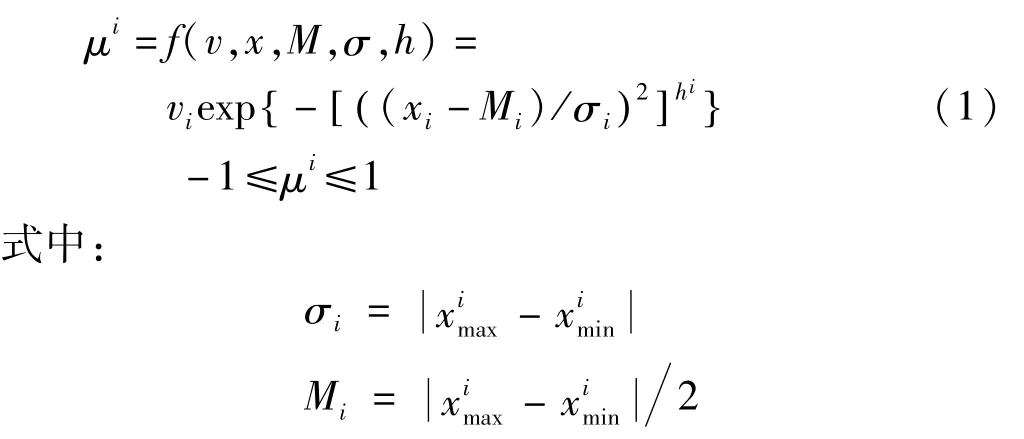
Mi表示状态区间的中心位置;σi表示状态区间的宽度;hi为变化速率。
计算得到的隶属度出现了负值,表征了特征量在状态区间中心的变化方向趋势。0≤μi≤1,表示当前时刻处于状态的位置,并且该状态有进一步加剧的趋势。同样,- 1≤μi≤0,表示当前时刻处于状态的位置并且该状态有进一步减弱的趋势。这种量化表示方法同时包含了状态程度和状态的变化态势。当状态处于某种正常模式下,这种表示方式的优势不是特别明显,但当状态处于临近区间时,这种表示方法的灵敏度就很高,它能够不断地捕捉状态的变化态势。
输入节点组的输出为μi在动态状态矩阵时间维上的均值

网络的输出值为输入状态矢量所属类别的概率P =[p1,p2,…,pm],m为待预测的故障数量。
1.1.2 训练算法设计
多层传递函数的量子神经网络模型中权值的算法仍然采用梯度下降法。为了防止因多个局部极小点和平台问题,采用修正BP 算法(MBP)、随机优化算法(RO)相结合的混合算法。算法描述如下:
当判断出MBP算法已经陷入一个低质的极小点或平台时,即转向RO 算法;当判断出RO 算法已使ξ移至一个质量更佳的极小点附近时,即转回MBP 算法。这样可以充分发挥定向搜索和随机搜索两者的优势。如何判断MBP 算法陷入了一个局部极小点或平台问题以及判断RO算法是否已经从一个局部极小点或平台转移到了更佳的局部最小点附近。
(1)MBP 算法陷入局部极小点或平台的判据。MBP算法中,令经验风险函数
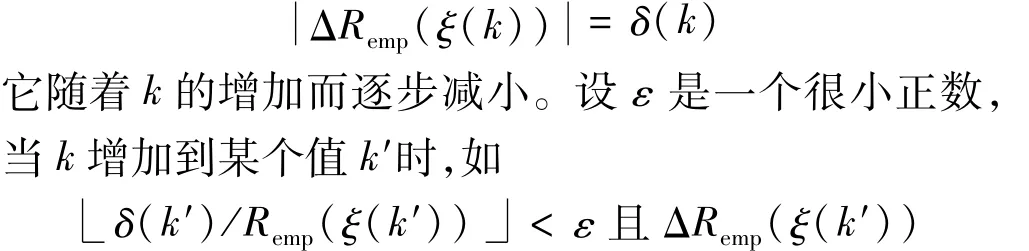
的值仍较大,即判断已进入一个低质的极小点或平台。
(2)RO算法从一个局部极小点或平台转移到一个更佳局部最小点附近的判据。RO 算法以δ(k′)为初值,从k =0 开始迭代计算。设δ(k)是每迭代一步的经验风险下降量,当k增加到k″时,如果下列不等式成立,则判断转移成立。

式(3)左侧是RO算法的累计风险下降量,系数λ是一个适当的正参数。
1.2 演化计算修正
1.2.1 演化趋势分析
定义 一个完备的故障特征模式应满足以下条件:①该模式包含了确定该类故障的所有特征量;②所有特征量的组合和该类故障形成了确定的映射关系;反之,如果不满足定义的条件,则称为伪故障特征模式。
在此基础上,做下列假设:
假设 由完备故障特征模式到故障的映射路径最短,那么伪故障特征模式到故障的路径长短和预测概率成反比。图1 显示了这种关系。
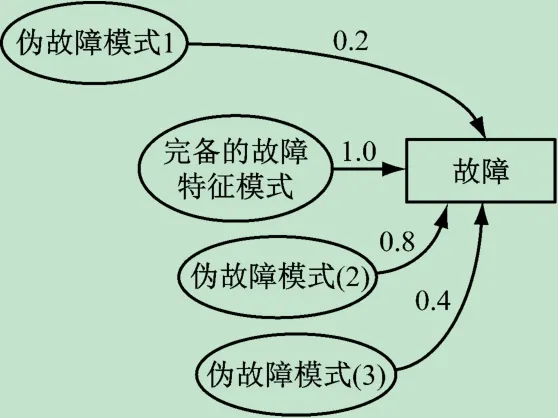
图1 故障特征模式与故障映射路径
对于某一个伪故障特征模式,各个给定的故障模式分别有不同的隶属概率,并且在时间维上,以某种速率向某个故障不断地收敛,最终演化为某一个故障。该演化方式就像是几个人同时从一个地点向不同的目的地行进,由于行进的速度存在差异,所以并不是距离目的地最近的人到达最快目的地。进行预测结果修正的目的就是在考虑演化速度的基础上,重新考量故障发生的概率。这样,在当前故障模式预测概率已知的情况下,剩下的问题就是要分析状态的演化速度问题了。
1.2.2 演化要素的计算
(1)路径的确定。一个设备处于正常工作状态时,特征量是在正常的数值区间范围内变化;故障发生时,特征量则在异常的数据区间内变化。正常的数值区间和异常的数值区间之间存在一定的交点,该交点就是状态阈值。当前特征量的数值点到状态阈值点之间就构成了演化路径。取状态阈值为演化路径的终点,以当前时刻的数值作为路径的起点,那么路径的长度

式中:xcritical表示状态阈值;xcurrent表示当前值,取绝对值保证了路径为正值。
这样,当前状态与故障之间的演化路径就由相关的特征量的当前状态与故障状态各特征量之间的路径长度构成的向量[l1,l2,…ln]T,n为特征量数量。
(2)演化速度计算。演化速度应该根据特征量在某时间单位上的演化路径变化来确定。计算当前的状态的特征量演化路径以及前k个时间单位的相同状态特征量的演化路径,构成了n × t矩阵,
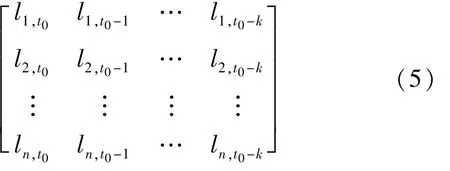
分别计算当前状态路径与前t各时间单位状态间路径的差值,构成了n ×(t - 1)的差值矩阵。
差值矩阵中的每个行向量的各个元素与时间单位构成了一定的函数关系f(l),f(l)表示了特征量的演化速度,本文称之为演化速度函数,为了表示方便,令S =f(l)。
每个特征量由于量纲不同,其演化速度函数的量纲也不同,因此需要对演化速度函数按下式进行规范化处理,

各特征量规范化后的演化速度函数就有了比较的统一标准。
为了确定状态模式的演化速度,首先引入一个经验性的结论。
结论 若设备具有故障原因A,则该设备必然表现出原因A所对应的全部征兆;反之则不成立。
为了保证预测结果的合理性和准确性,取各个特征量中最小的演化速度作为当前状态的演化速度。
1.3 预测结果的修正
预测概率越高,演化速度愈快,当前状态到故障的收敛也就快,发生该故障的可能性也就越大。在预测概率的修正时,先对每个待预测的故障进行演化速度的计算,然后对于神经网络的初次预测概率按照下式进行修正,

将各故障的预测概率修正后的结果按照式(6)、(7)归一化得到最终的预测结果。为了表示方便,修正后的故障概率仍然用pi表示

2 算法验证与分析
提取其中三类发动机故障作为试验样本。包括发动机轴承磨损(A)、发动机转子动平衡不匹配(B)、发动机涡轮轴篦齿盘松动或间隙过大(C)。取n =5 验证预测效果。
采用Person相关系数进行相关性衡量,飞行数据中与发动机振动特征相关系数为正,且大于0. 5 以上的特征包括发动机高压转子转速(单位%)、发动机低压转子转速(单位%)以及开关量信号发动机转速超转告警。舱音信息监测发动机噪声的变化。选择三类故障在故障征兆上具有相似性,在征兆上存在局部重叠。数据样本如图2 所示,3 类故障征兆描述如表1所示。
在进行神经网络训练时,按照下列步骤进行:①取时间单位为架次,对某型发动机发生故障前的n 个架次的相关特征进行收集;② 对训练样本进行划分。对于正常范围内的数据归入同一个等级,对不在正常范围内的数据进行等级划分,分别对应不同的故障概率。
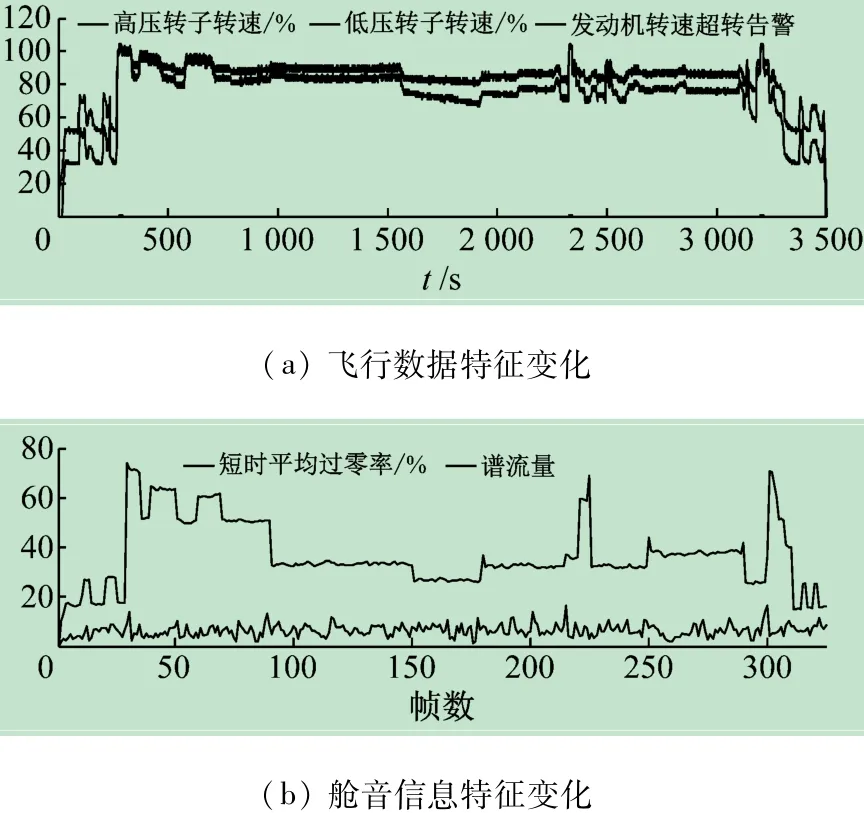
图2 原始样本图
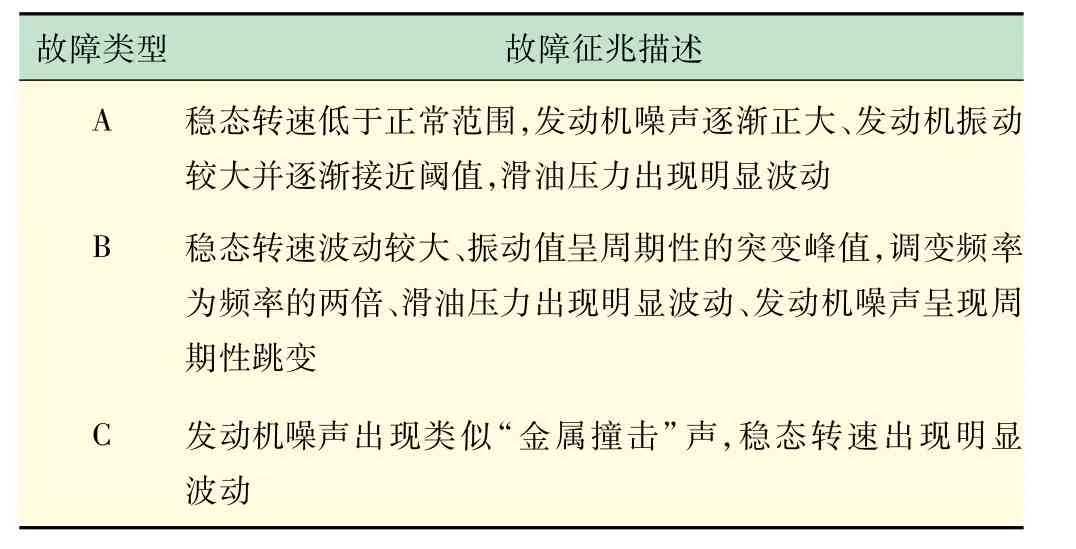
表1 故障征兆描述
提取故障B 发生前5 个飞行架次的相关特征量数据进行故障预测,神经网络预测的结果如图3 所示。
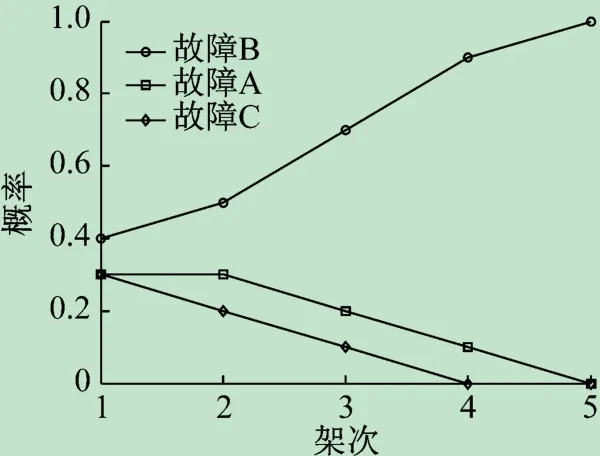
图3 神经网络预测结果
由图3 可以看出,3 类故障之间的征兆出现局部重叠。在故障发生早期,振动值首先出现异常波动,转速逐渐出现故障征兆,最后滑油压力出现相应的征兆,发动机噪声随着振动和转速异常波动的加剧,最后形成明确的故障征兆。所以在故障发生前对于征兆明显的故障A、B 预测概率更高。由于故障A、B 在转速和振动值上的分辨随着时间的增加,逐渐区别开来,最终形成了明显的故障特征。
经过演化速度修正后的预测结果如图4 所示。由图4 可以看出,经过演化速度的修正后,故障B 的预测概率比修正前有所增加,这是因为提取了发动机转速和振动值的演化速度进行修正,使得这两个对故障B最先敏感的特征量充分地反映到预测结果中。
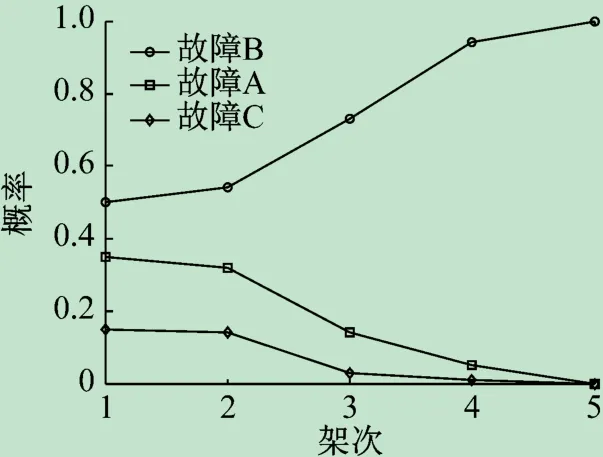
图4 修正后的预测结果
取故障B发生前10 个架次的数据进行训练,神经网络预测和修正后的预测结果如图5、6 所示。
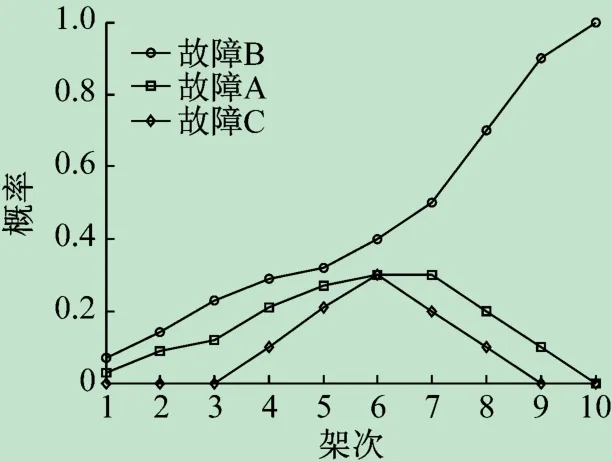
图5 10个架次神经网络预测结果
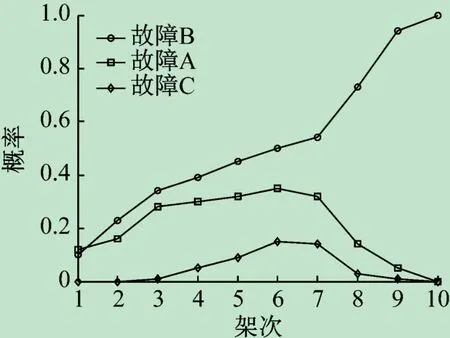
图6 10个架次修正后的预测结果
由图6 可见,随着预测架次的增加,修正后的预测结果准确率明显高于神经网络的初次预测结果,该方法对于小样本多源信息的故障预测是可行的。
3 结 语
本文针对基于小样本数据故障预测时建模困难和预测准确率不高等问题,提出了BP 神经网络的初次预测器模型,改进了训练算法,避免了传统BP 网络存在的局部极小点和平台的问题。利用历史样本进行演化趋势分析计算,提出了演化修正函数对初次预测概率进行修正。利用某型发动机3 类故障时的工作参数数据和同步音频信息参量进行了算法验证。结果表明,本文的方法比单一的BP 神经网络预测具有更高的准确率,同时克服了小样本数据信息量不足造成的预测效果不佳等问题,适用于多源信息下的故障预测应用。
