机械工程控制基础的多层次实验教学体系改革
2020-09-14郭艳婕王诗彬杨立娟李小虎
郭艳婕, 王诗彬, 杨立娟, 李小虎
(西安交通大学机械工程学院,西安710049)
0 引 言
机械工程控制基础是机械工程类专业人才培养方案中的一门专业必修课,旨在培养学生运用科学方法和工具来解决机械工程基本问题的系统分析设计能力、综合创新能力,是培养机电交叉人才的重要一环[1-2]。机械工程控制基础是一门交叉学科互相融合的课程,将控制与数理基础、工程基础和经济管理等知识相结合,综合应用于解决复杂机械工程问题。本课程内容抽象、知识点多,学生在学习机械工程控制基础课程的过程中,普遍存在对控制的基本概念和物理含义理解不透彻,对控制的基本方法和手段掌握不熟练,难以在短时间内完成将理论知识应用到实物上等问题[3-5]。因此,对机械工程控制实验教学体系进行了改革,构建了多层次实验教学体系,通过相应的机械工程控制基础实验和实践过程,帮助学生更好地理解该课程的基本知识和概念,熟练掌握系统的表达方法,提高学生运用控制的方法来分析、解决问题的手段,充分提高分析和解决控制问题能力,培养学生开展与控制技术相关的分析设计、综合创新意识和能力。
1 多层次实验教学改革思路
目前我校机械工程类学生多为重“机”轻“电”,机械方面知识非常全面,熟悉机械设计、制造等各个环节,但是对于电类知识,学生仅仅了解相关知识,并不能在实际中将机械与电控有效地结合起来。
机械工程控制基础的层次化实验是指根据课程的教学要求、实验的教学定位,结合学生的能力和兴趣,将实验划分为三层次:基础性实验,综合性实验,创新性实验。其中基础性实验注重学生对基础知识、基本概念的理解,并且培养学生对机械控制的意识。综合性实验注重学生运用控制理论的方法分析、解决问题的能力。创新性实验注重学生开展控制技术应用到实际的机械对象上的创新意识、探索精神和实践能力。创新实验作为学生将自动化器件与机械控制理论与被控机械对象相结合的关键实践环节,可以有效地将机械与电控结合起来,培养学生根据实际需求分析并选择合理的自动化器件,编写典型的测量与控制方案,进行自动化系统的“举一反三”的类比设计、“创新组合”的新产品开发设计以及“功能齐全”的、满足实际要求的工程设计,最终实现机械与电控之间结合。
2 机械工程控制基础实验教学体系
2.1 教学目标
机械工程控制基础实验教学目标是使学生运用控制论的基本理论和基本方法,分析研究机械系统的信息传递与反馈和系统的控制性能,培养学生判别系统稳定性和变更系统参数以改善系统性能的分析与综合能力。课程目标包括以下3个方面:
(1)掌握机械控制系统的基本概念和组成原理,具备自动控制原理与系统的基础概念;掌握典型机电传动单元与系统的数学建模方法;掌握机电系统的时域和频域分析设计校正方法。
(2)培养学生对机械工程控制中复杂问题的分析和对复杂机械控制系统进行分析、设计的能力,并能够采用相关软件进行模拟仿真,能够构建实验控制系统进行分析研究,具有研究和解决机械控制工程问题的能力。
(3)初步了解机械系统常用的控制方法,以及现代控制和智能控制的原理,了解机械控制理论的现状与发展趋势。培养学生运用机械控制工程领域新技术新方法对复杂机械工程中的系统控制问题进行理论分析、实验研究的能力。
该实验分为基础性、综合性和创新性三层次实验教学体系,其中基础性实验和综合性实验为必做实验,要求学习机械工程控制基础的学生必须完成这两个层次的实验,而且必须达到规定的实验要求。
(1)基础性实验的目标。通过完成控制基础实验,能够加深对控制基本概念的理解,熟悉不同系统的时域响应曲线及常见的控制算法,理解控制响应的衡量标准,掌握调节控制参数基本规律[6-8]。
(2)综合性实验的目标。建立实际控制系统的理论模型,应用根轨迹对理论模型进行分析。通过根轨迹对理论模型进行分析,选取控制参数,进一步搭建仿真模型和实物控制模型,通过仿真与实物对比,不同参数之间对比验证控制算法,从而让学生掌握控制中常用的控制方法,为控制技术的工程应用打下基础[9-10]。
(3)开放创新性实验目标。学生根据自己的能力和兴趣,结合工程问题或者生活实际自行拟定实验对象,提出控制方案,并开发实验控制对象装置和方法,实现预期功能。通过开放性实验让学生灵活掌握控制方法的应用,培养学生的创新意识[11]。
2.2 实验教学内容体系
机械控制层次化实验教学内容体系由基础性、综合性、创新性实验组成,其实验内容如图1所示。
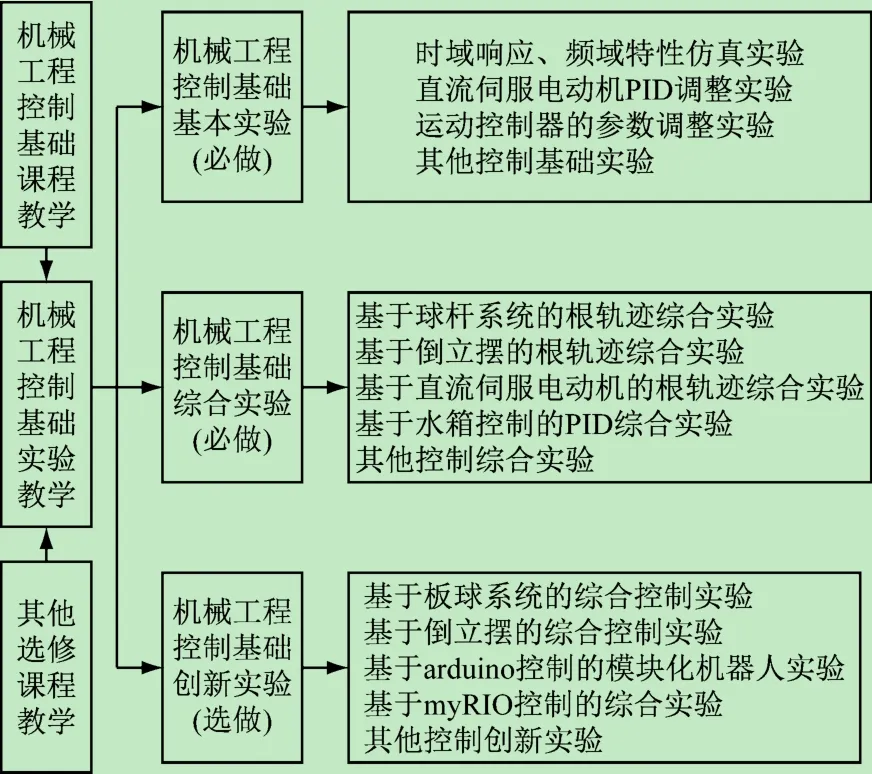
图1 多层次机械工程控制基础实验教学体系
基础性实验内容以验证性实验为主,了解不同系统参数下时域响应曲线特性;认识不同系统的频域特性不同;了解PID参数对控制系统的影响。
综合性实验需要结合不同的对象,能够正确地建立系统的数学模型及传递函数,掌握根轨迹法,可以根据根轨迹法确定系统的控制参数,搭建系统的仿真模型进行仿真控制,并与实际控制结果进行对比分析。
创新性实验是以学生自行拟定实验对象,结合工程技术问题或生活实际等,自行设计实验方案,针对不同机械对象进行分析研究,通过传感器、单片机、加工等技术应用控制方法达成实验目标,完成实验项目。
本实验中,基础性实验学时为每个实验2学时,学生为必做实验,综合性实验为4学时,学生选做2个,创新性实验为课外学时,学生可以在学有余力情况下,结合自身需求,选做实验。
3 多层次实验教学实践探索
近5年来,对机械工程控制基础多层次实验教学进行了初步实践探索,取得了较好的成效,让学生对机械工程控制基础有了基本认识。
3.1 基础性实验
控制系统的各个典型环节的动态模拟仿真是一项控制基础实验,学生采用机械工程控制基础课程实验软件模拟仿真系统特性。学生通过这项控制基础实验,可以深刻理解控制系统中不同的参数选取对系统稳定性等参数影响很大[12-15]。图2所示为采用实验软件模拟仿真一阶系统的阶次响应实验结果。本实验为时域响应、频域特性仿真实验。图2中设计的实验软件模拟传递系统的时域响应,同时可见系统的伯德图、奈奎斯特图和根轨迹曲线,通过虚拟仿真学生可以实际了解不同传递函数下对系统的影响,通过图像直观了解超调量、上升时间、调整时间、峰值时间、稳态误差、幅值与相位裕度等概念。

图2 实验软件模拟仿真一阶系统的阶次响应实验结果
3.2 综合性实验
以基于球杆系统的根轨迹综合实验为例,球杆系统作为典型的不稳定系统,如果不能进行有效的控制,小球不能稳定运动。综合性实验是在系统分析的基础上,建立传递函数,通过对系统的根轨迹分析,确定系统的控制参数,实现球杆系统的稳定控制。综合性实验需要学生通过评价控制系统(如超调量、上升时间、调整时间等),应用滞后校正、超前校正、滞后—超前校正、PID校正等方式改善控制系统的稳定性、快速性和准确性[16-19]。
这项实验流程如图3所示,学生自行建立球杆系统的传递函数,通过Matlab/Simulink软件的应用,对系统进行分析,进一步根据课堂学习的控制算法,确定根轨迹的参数,最终达到球杆系统中小球能够平稳运动。
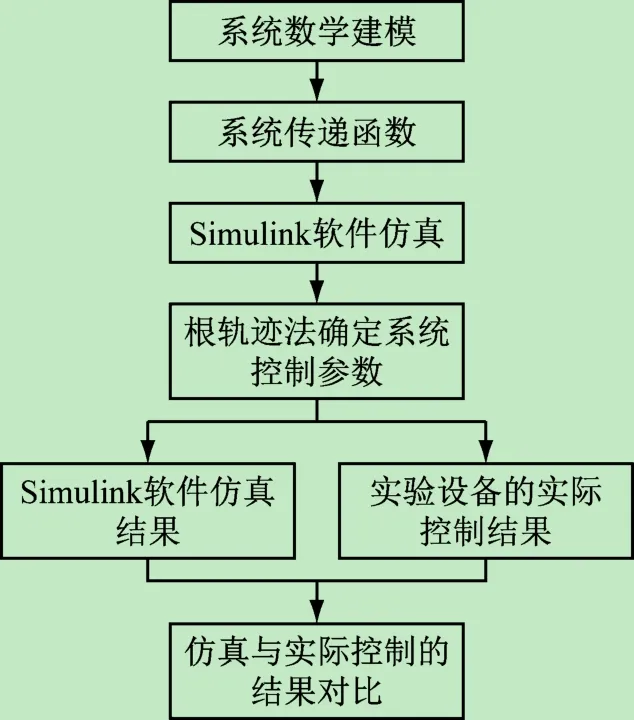
图3 综合性实验流程
球杆实验系统由电动机、横杆、小球组成,电动机通过皮带带动轮盘旋转,从而控制横杆位置,让小球在杆上左右滚动,其机械结构如图4所示。
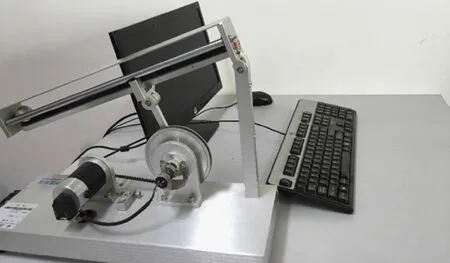
图4 球杆系统机械结构本体
通过对球杆系统分析,可知球杆系统为典型的二阶系统,形式直观明了是典型的开环不稳定系统。未加控制环节时,其根轨迹如图5(a)所示,加入控制环节后,其根轨迹如图5(b)所示,可见其增益量为2及对应的零点-1时,系统达到了稳定状态。
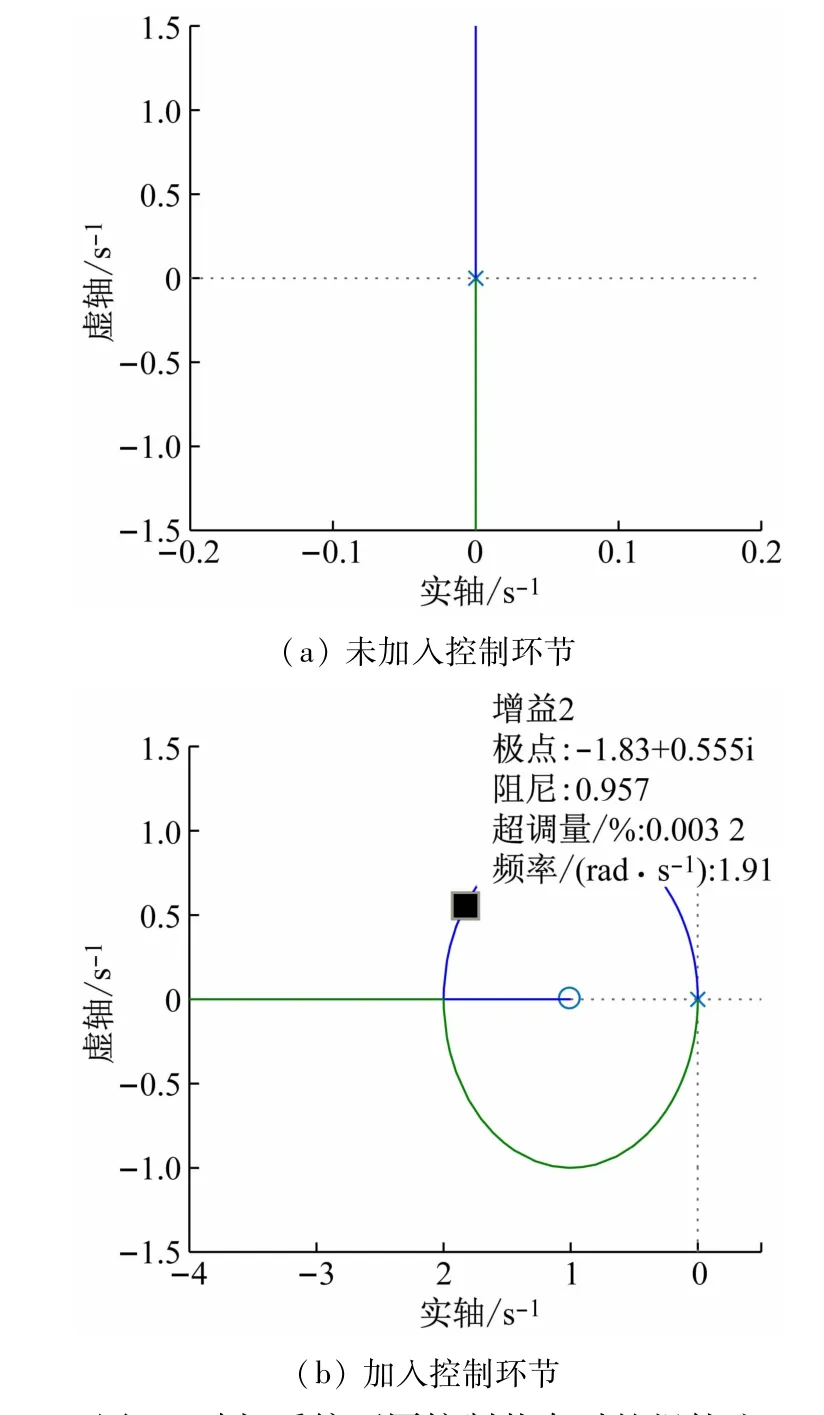
图5 球杆系统不同控制状态时的根轨迹
通过Simulink建立球杆系统的仿真控制框图如图6所示。
当加入控制环节时,通过图5中根轨迹可以确定其增益为2时,系统趋于稳定,此时系统的仿真控制框图见图6。可见系统此时配置了开环零点-1,配置增益2,采用超前校正方式对系统进行了改善。
进一步对仿真控制结果与实际控制结果进行对比,具体数值如图7所示,红色为仿真结果,可见最终稳定在0.25处,蓝色为实际结果,可见稳定在0.25左右,超调量较小,通过超前校正可以有效地实现预期功能。
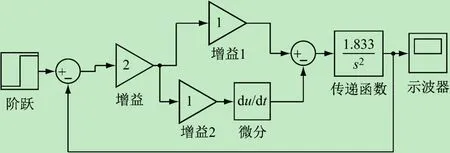
图6 球杆系统的仿真控制框图

图7 球杆系统仿真与实际控制对比
3.3 创新性实验
创新性实验的项目方案由学生结合自身的生活实际提出。引导学生对自己在生活实践中感受到的不方便、不便利性的方面入手,从而有“改变”“优化”的想法,继而提出新的思路。实验对象由学生自行拟定,在查阅文献、综合资料基础上,自行设计实验方案,通过细化实验方案,具体实验细节,最终将控制以传感器和单片机为载体应用到项目中去。
以“自动浇花机”为例,学生在实际生活中发现盆栽浇水一般通过人工来实现,这样容易造成水资源浪费,且浇水时间和浇水量因人而异,难以实现理想浇水。在查阅植物特性后,发现不同植物种植需要的土壤湿度、环境温度不同,因此学生设计了自动浇花机,系统框图如图8所示,采用盆栽种类、土壤湿度、环境温度等多种信息作为浇花过程的控制参数,利用单片机对有关参数进行了实时采集和控制,实现了浇花过程的科学、自动控制。可以看到该项目综合应用了机械控制技术、测试技术等知识,有效地锻炼学生的创新能力和实践能力。
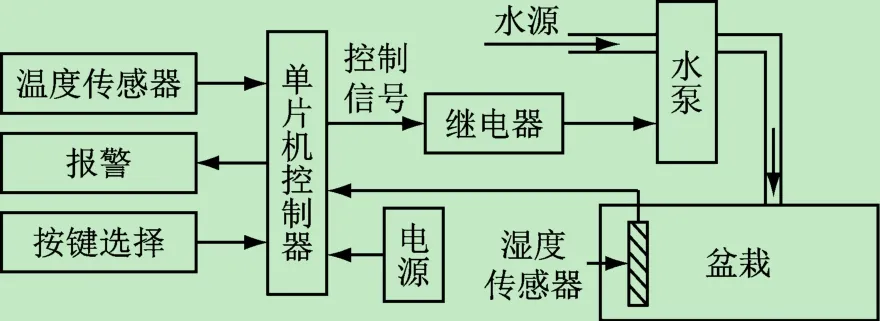
图8 自动浇花系统框图
4 实验教学方法
4.1 实验环节设置
根据机械控制实验的目标定位不同,实验教学方法也不同。
(1)基础实验。主要在教师指导下,学生按照实验指导书上的实验步骤完成实验,该实验为必做实验,难度较低,学生可以定性了解机械控制中相关知识点。这一层次实验主要是针对控制中基础理论知识。
(2)综合实验。该实验具有一定的探索性,需要从建模到理论分析再到选取控制点,最后实物控制,共分为4步:①理论建模。本实验要求学生结合基础知识,对实物进行分析,建立理论模型,通过拉氏变换,形成开环传递函数;②理论分析。本实验通过根轨迹,借助Matlab绘制根轨迹曲线图,通过根轨迹选取开环零点,选取增益。并进一步通过Simulink仿真,对比控制前后、不同参数的仿真曲线区别,结合实物限制,选取合适的控制点;③实物控制。将第2步中选取的控制点应用到实物控制中,从而控制实物。对比不同控制参数下,实际响应曲线,理解控制系统的评价指标及其对应实物情况;④对比分析。本实验将理论分析与实物结果进行对比,可以发现传递函数对实物的影响,同时也可通过不同的控制参数之间,进行结果对比。
(3)创新实验。该实验主要是针对实验研究的对象,按照不同的功能和应用要求,设计实验方案并加以论证,开发部分装置或系统软件,完成系统软硬件集成调试,自主完成装置的现场测试、数据采集和分析等。创新实验的形式、内容和方法都是开放的,学生可以根据自己的能力、专业兴趣和学习时间,事先预约实验时间。实验设备一般都需要购买或者自行加工。这类实验具有探索性和创新性。
4.2 实验考核
基础性实验为定性实验,对实验问题的理解程度、独立实验操作能力、得到实验结果的正确程度,能够定性描述出控制问题。
综合性实验的考核采用过程考核的方式,实验划分为4部分,将每一部分根据学生完成情况进行分析。具体考核步骤与评分标准如表1所示。
创新实验为开放式实验,由于每组学生实验类型不同,完成的功能各有千秋,因此评价指标并不能单一决定,该实验在整体上首先需要对项目完成的难度进行区分,随后对项目完成度进行评价,从而得到整体实验成绩。最后,根据每位组员贡献度给出学生成绩。
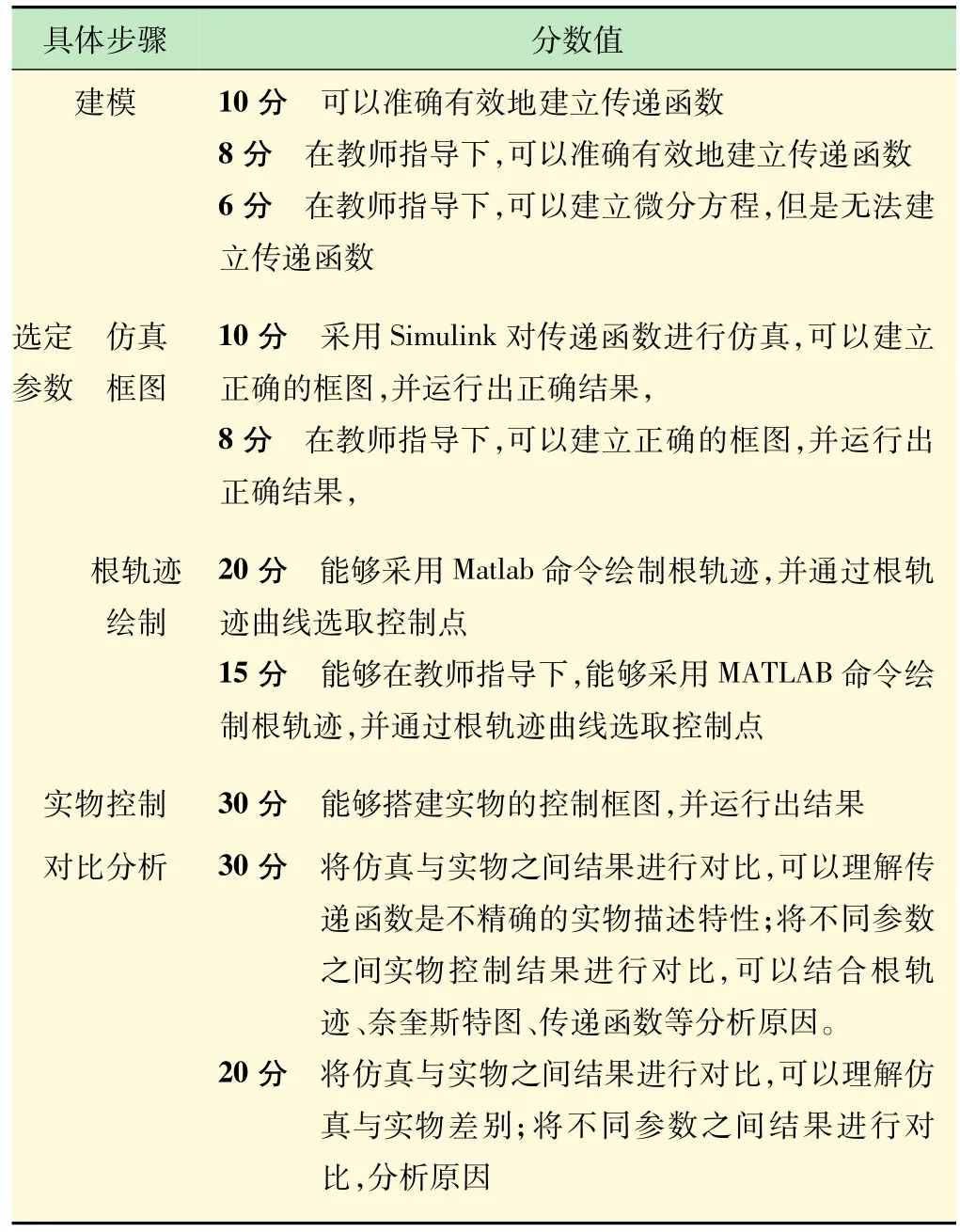
表1 综合性实验量规表
5 结 语
机械工程控制基础是一门与实际结合紧密,但是又比较抽象的课程,通过实验教学可以帮助学生掌握和加深理解机械控制课程知识。
基础性实验注重理解控制中基本概念、基本方法和基本评价参数,综合性实验注重学生运用控制理论的方法分析、解决问题的能力,建立理论与实物之间桥梁,创新性实验注重将控制技术应用到实际的机械对象上。通过构建多层次机械控制实验教学体系,克服了原有实验模式的不足,改进了实验教学形式方法和组织管理,逐步形成了完善的实验教学体系。
同时针对多层次实验教学体系,分别探索了不同层次实验教学的方法及考评体系,将实验考核过程化、具体化,在这一系列的实验教学过程中,激发学生的学习兴趣,增强了学生对机械控制的理解能力,提高了学生解决工程实践问题的能力,开阔了视野,取得了良好的教学效果。
