基于MEMS倾角仪的桥梁挠度监测动态及长期性能研究
2020-09-14刘龑王文剑李波章世祥
刘龑, 王文剑, 李波, 章世祥
(中设设计集团股份有限公司 江苏省道桥管养技术与应用工程研究中心, 江苏 南京 210014)
桥梁的挠度变形是桥梁整体变形和承受荷载能力的直观反映。因此,可通过长期观测桥梁的竖向挠度变化情况来评估桥梁整体变形和承受荷载能力的变化情况。目前,国内外比较成熟的检测方法主要有:电子千分表、GPS、连通管液位式、基于光学的挠度测量。对于跨江大桥等特大型工程,大多采用基于GPS的挠度监测方案;而由于精度或可靠度的原因,这几种方法均难以应用在50~200 m跨径桥梁中。
由于航天科技中惯性姿态设备的迅猛发展,倾角测量方法得到了极速发展,在测量精度及可靠度上有了大量技术积累,大多为基于加速度传感器的倾角设备。其工作原理为采集重力加速度在传感器敏感轴上的分量大小,通过控制单元对芯片传输的信号进行处理,计算出倾角大小。理想情况下,当加速度传感器沿敏感轴方向倾斜角度为θ,则加速度a与倾斜角度θ的关系为:
a=gsinθ
(1)
因此,众多土木工程学者开发了基于转角的桥梁挠度测量法,其原理是通过倾角仪测量桥上多个控制点的竖向转角值,然后基于一定的数学模型由倾角值计算出挠度值。
但目前,这一挠度监测技术大多停留在验证性试验或静态试验过程,未对复杂工况下监测系统的可靠度及稳定性进行深入研究。
1 基于不同算法的挠度测量精度分析
1.1 方法介绍
目前,基于倾角仪的挠度计算方法从其原理上主要分为3大类:最小二乘法、三次样条插值法、积分法。该文以传统的三次样条插值法为基础,将最小二乘法及积分法融合进来,提出一种无测点限制的改进样条函数拟合法。该方法在三次样条转角求解矩阵中增加了非采样点转角的限制,保证了拟合转角曲线的形状与理论转角曲线高度一致,使得三次样条计算法中的系数矩阵不再出现奇异,对测点布置无任何限制,有利于该方法的推广应用。
1.2 基于数值仿真的倾角挠度转化分析
以某(68+110+68) m三跨连续梁桥为工程背景,选取代表性加载工况对其主跨进行挠度计算分析。通过有限元分析软件模拟该桥在各工况下桥面纵向上各测点的转角响应,然后利用4种算法求得桥梁纵轴线方向的计算挠度值。此次转角测点按7等分点布置,共布置8个转角测点。
典型加载工况示意见图1。各加载工况下4种算法挠度结果见表1。

图1 3种工况加载示意图(长度单位:cm;荷载单位:kN)

表1 不同算法挠度换算结果 mm
由表1可知:总体上,修正样条插值法计算精度最高,三次样条插值法及积分法次之,最小二乘法最差,修正样条插值算法的理论误差小于0.1 mm。
2 MEMS倾角仪测值与环境温度的相关性
对于长期监测而言,由于MEMS传感器自身的特性,其存在一个较为显著的温漂现象,即不同的温度其零点存在漂移现象。一般MEMES倾角厂商提供的温漂参数在0.000 7°/℃以内,以1年周期内大气温差40 ℃计算,误差达到了0.028°,这个误差将导致数据完全失真,因此必须采用有效的温度修正措施。
该文利用三轴高精度转台(图2)对20个倾角传感器在不同温度下的温漂参数进行测量,测量中设置转台在所有温度下均保持统一角度。结果见图3。
由图3可知:
(1) 基于MEMS加速度计原理的倾角传感器其温度漂移特性较为复杂,不同传感器间差异较大、趋势不一,难以采用统一的公式或参数进行修正。

图2 三轴高精度转台

图3 实测传感器温漂数值
(2) 传感器品控难度较大,温漂系数全部大于标称的0.000 7°/℃,最大的温漂达到了0.006 5°/℃,最小的也达到了0.002°/℃。
(3) 同一温度下,传感器的重复性较好,数据基本稳定。
综上所述,采用基于倾角仪的挠度监测中,可在安装前,对传感器进行一一标定,在监测中将对应温度的温漂系数进行误差修正后使用。
3 MEMS的动态性能研究
动挠度测试一直是桥梁安全监测中的难点。为了研究基于倾角仪的挠度测试系统在动挠度测试方面的性能,笔者组织了实桥试验,采用总重50 t的前四后八重车,对目标桥梁进行无障碍行车试验,车速分别为10、40及80 km/h。跑车过程中,利用倾角仪采集系统对其进行数据采集,采集频率为50 Hz,实测1#测点的转角结果如图4所示。

图4 跑车作用下的倾角实测曲线
由图4可知:
(1) 动态采集过程中,存在大量的噪声数据。
(2) 测试噪声与车速存在一定的相关性,在10 km/h的车速下,噪声幅值为0.02°,在80 km/h下,噪声幅值达到0.1°,已完全淹没了真实信号。
根据对原始信号的分析,该文认为信号中的噪声源自设备的固有特性。基于MEMS的倾角仪本质是一种加速度传感器,当布设于结构中时,通过识别结构的加速度值,按式(1)方式转换为测试点位置发生的转角。因此,对于静止测试目标,通过采集原始数据即可识别测试目标的真实转角。而对于运动中的物体,应进行二次处理来过滤信号中的振动噪声,将由于振动产生的加速度值和由于角度变化产生的加速度变化值两者分开。
通过对加速度时程曲线的分析,可知噪声发生在车辆通过桥梁之后,主要原因在于车辆在桥梁上时,桥体处于受迫变形中,自身振动不占主导作用,桥梁加速度变化主要由变形产生;而车辆通过桥梁后,主梁由于尚未进入稳定状态,开始自由振动。此时,桥梁自振占到主导因素,加速度变化由梁体竖向自由振动产生。
笔者对原始信号进行了频域处理,获取了10 km/h车速下倾角仪实测频域图,如图5所示。由图5可知:1 Hz以上的高频信号数据较多,而车辆过桥的时间,至少在5 s以上,整个车辆过桥波形对应的频率为0.2 Hz左右,分析认为高频数据来源于车辆过桥后的桥梁自振。

图5 原始倾角数据频域图
因此,该文采用了带通滤波法对高频信号进行处理,滤波阈值分别设为0.5、2 Hz,结果如图6所示。滤波结果表明:在0.5 Hz的低通信号时,较为符合真实的倾角变化。与此同时,这一方法存在一定的问题,将信号中属于自由振动信号完全过滤,消除了动态增量部分,最终得到的是准动态数据。

图6 基于带通滤波的倾角实测曲线
4 实桥验证
基于以上研究,该文开发了基于保形的样条函数拟合法的倾角仪挠度监测系统,并通过带通滤波、温漂系数修正等对测试结果进行预处理。整个测试系统由倾角仪、数据传输系统、数据分析处理系统组成,其网络传输拓扑图如图7所示。

图7 基于倾角仪的挠度检测系统网络拓扑图
4.1 准动挠度测量验证
利用非接触多点位移检测系统与倾角换算挠度进行了比较分析,典型结果如图8及表2所示。
由图8可以看出:该文提出的挠度监测时程曲线与(非接触)多点位移检测系统测试结果基本一致,但(非接触)多点位移检测系统所测得的挠度曲线抖动更加显著,噪声较大。由表2可知:两种测量方法所计算的中跨跨中最大挠度值绝对误差不超过1 mm,相对误差不超过10%。

图8 某时刻现场挠度试验测试结果

表2 现场挠度试验测试结果
4.2 长期稳定性验证
为了验证这一监测系统在实桥上的应用成效,该文选取了3跨连续梁及5跨连续梁主跨进行为期1个月的测试。根据有限元计算结果, 3跨连续梁主跨对温度效应较为敏感,而5跨连续梁的第3跨在温度作用下基本无挠度变化。
图9~11为两座桥梁主跨2月份的实测数据。

图9 2月份温度变化情况(2018年)
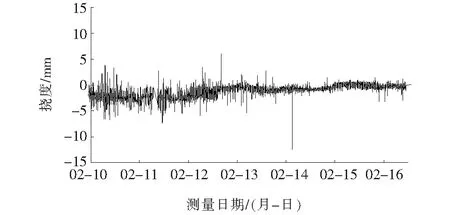
图10 5跨连续梁的2月份挠度时程曲线(2018年)

图11 3跨连续梁的2月份挠度时程曲线(2018年)
由图9~11可知:
(1) 温漂效应修正后,挠度监测设备能够较好地反映出两座桥梁随着温度变化的挠度响应特征,说明长期稳定性较好。
(2) 2018年2月13日至2月20日间,数据均较为平滑,主要由于春节期间无重车过桥所致。
5 结论
为了分析复杂环境下基于MEMS倾角仪的桥梁挠度监测技术的可靠度及稳定性,该文从算法优化、温度影响、瞬时振动影响等多方面着手进行了研究。得到以下主要结论:
(1) 该文所提出的修正样条函数,其算法精度达到了0.1 mm。
(2) 对不同车速车辆过桥时的倾角动态采集性能进行了研究,并分析了信号的时域、频域特点,采用了带通滤波算法对倾角数据进行预处理,取得了较好的效果。
(3) 通过对MEMS倾角仪的温度敏感性能研究,提出了倾角温漂修正方法。
(4) 经过实桥应用及对比测试,验证了这一挠度监测方案在动态采集以及长期性能方面的可靠性。
