电动汽车车速信号采集与传输的方法
2020-09-10朱明
朱明


摘要:车速信号被广泛应用于电动汽车各个ECU,车速信号的准确性直接关系到汽车的安全性与可靠性。MCU通过编码器获得电机转速,再利用后桥主减比、轮胎滚动半径计算出车速,或者ABS通过轮速传感器、轮胎滚动半径计算出车速。最后MCU和ABS分别将各自计算出的车速信号发送至CAN总线上,给各个ECU使用。
Abstract: The speed signal is widely used in each ECU of electric vehicle. The accuracy of speed signal is directly related to vehicle safety and reliability. The MCU obtain the motor speed through the encoder, then calculate the speed using the main reduction ratio of the rear axle and the tire rolling radius, or ABS calculate the speed by the wheel speed sensor and the tire rolling radius. Finally, the MCU and ABS respectively send the calculated speed signal to CAN bus for each ECU to use.
关键词:电动汽车;车速信号;MCU;ABS
Key words: electric vehicle;speed signal;MCU;ABS
0 引言
随着电动汽车的发展,电动汽车车速信号的准确采集与显示,对于驾驶员以及全车电子电控单元控制至关重要[1-3]。电动汽车需要车速信号的电控单元相较于传统燃油车更多。因此,车速信号的准确获取以及安全传输对于整车非常重要。CAN(Controller Area Network,CAN)总线技术,由于其高性能、高可靠性、实时性等优点,越来越广泛的应用到汽车电子控制系统中。
电动汽车采用电池管理系统(BMS)、驱动电机控制器(MCU)、充电机控制系统(OBC)等替代传统车的动力系统。BMS、MCU、电动空调系统(EAS)、数据采集系统(RMS)、行人警示器(VSP)等都需要采集车速信号给控制系统使用,并且这些ECU大多数都采用CAN总线通讯方式实现复杂的功能。传统燃油车可以通过车速传感器采用硬线的方式输出给组合仪表,组合仪表通过硬线或者总线的方式输出给其它单元使用,或者通过防抱死系统(ABS)采集轮速传感器,再通过硬线或者总线的输出给其它单元使用。但是硬线方式需要考虑不同电子电控单元信号的匹配问题,设计比较复杂,可靠性较低。电动汽车无车速传感器,可以通过MCU的编码器、后桥传动比、轮胎的滚动半径等计算车速值,MCU再通过CAN总线的方式输出给其它单元使用。
本文通过MCU车速信号和ABS车速信号融合的方法,降低了电动汽车由于MCU故障或者ABS故障导致车速信号丢失带来的安全风险。
1 车速获取方法
1.1 车速传感器
车速传感器采用霍尔式频率传感器,车速传感器每转一圈,输出的脉冲数为n(传感器固定的参数)。霍尔式频率传感器具有抗干扰能力强、输出信号幅值不受靶轮转速影响、使用寿命长等优点,被广泛应用于汽车中。传感器安装于变速箱输出轴靶轮,电子电控单元采集车速传感器脉冲信号,计算出车速信息。电子电控单元依据车速传感器脉冲周期、变速箱至传感器速比、后桥主减速比、轮胎的滚动半径计算得出车速,计算公式如下:
1.4 车速信号基准
国家标准法规GB 15082-2008《汽车用车速表》要求,车速表指示车速要大于实际车速,避免驾驶员超速行驶,具体要求如下:
理论上显示车速在满足法规要求的前提下,越准确越好。实际上,汽车轮胎的滚动半径受胎压、车辆载荷、轮胎磨损等因素都会使滚动半径变小,影响较大。传动系统的误差小,可以忽略。车速表的车速与轮速同步,在车速不变的情况下,由于轮胎磨损等因素的影响,只会使车速表的指示变得更高。并且,车速表的显示都是采用正公差进行设计。
2 电动汽车车速信号安全传输系统
2.1 车速信号传输系统
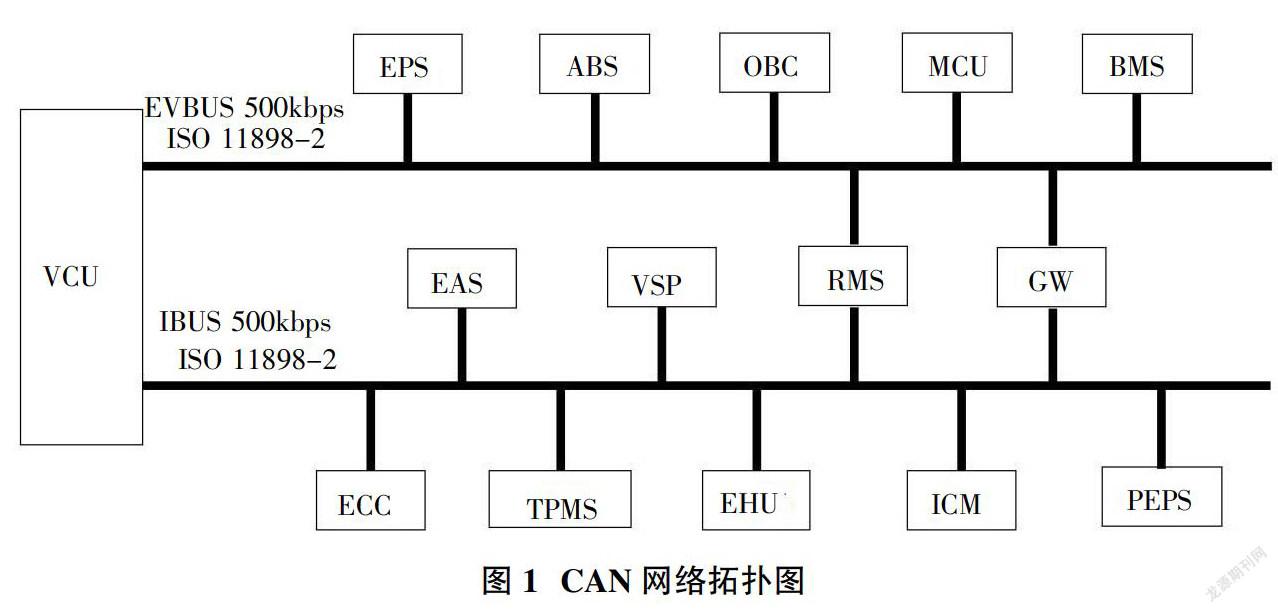
电动汽车的电子信息化越来越高,车速信号的准确性以及稳定性对车辆安全非常重要。图1为某一车型车速信号CAN网络拓扑图,该系统包括:整车控制器(VCU)、MCU、BMS、OBC、ABS、EPS、组合仪表(ICM)、娱乐主控单元(EHU)、EAS、电子温控系统(ECC)、RMS、胎压监测系统(TPMS)、网关(GW)和PEPS系统等。
该系统包括两路满足ISO 11898-2要求的高速CAN总线,EVBUS和IBUS,GW作为这两路CAN的中转站,各控制器模块都可以通过总线读取车速信号。组合仪表预留硬线车速信号输出接口,通过PWM硬线方式输出给其它不带总线的用电器单元,方便扩展,降低成本。
2.2 车速信号选择
图2为某一车型通过ABS和MCU采集到的车速信号。ABS存在一个最小识别车速,车速为2km/h[4]。MCU通过电机编码器识别电机转速,最低识别车速比ABS小。图3为MCU与ABS车速信号的差值。通过图2和图3可以看出在车速小于30km/h时,MCU与ABS的差值在-1~1km/h区间。在车速大于30km/h时,MCU与ABS的差值在-0.5~2.5km/h区间,并且大多数时刻,MCU的车速都相較于ABS要高。
当点火开关在ON档时,组合仪表通过CAN总线同时获得ABS发出的车速和MCU发出的车速,并且以这两者的最大值作为组合仪表当前车速显示。
当点火开关在ON档时,组合仪表通过ABS车速报文的车速有效标志位判断车速信号是否有效。如果无效,将MCU发出的车速信号作为当前车速显示。
当点火开关在ON档时,组合仪表通过MCU报文判断MCU内部的编码器是否存在故障。若有故障,将ABS发出的车速信号作为当前车速显示。
通过以上车速信号选择方法,有效降低了由于车速信号源故障以及传输问题导致的风险。经可靠性试验验证,行驶5万公里以上,未出现车速信号异常的情况,验证了此车速信号选择方案的可行性。即使在ABS系统存在故障或者电机故障、轮胎胎压欠压等状态下,仪表也能准确的指示出满足国标要求的车速。
3 结束语
通过建立电动汽车车速信号安全传输系统,电动汽车各个ECU单元通过CAN总线通讯方式,安全地、可靠地、高效地实现了每个ECU单元之间的车速信号交互与传输。本文采用的车速信号获取和车速信号选择方法,准确性和可靠性优。
参考文献:
[1]冷德龙,杜洁,孙连明,苏朋军.基于多信号源融合的汽车车速信号处理及应用[J].汽车电器,2018(12):33-34,37.
[2]雷伟昌.汽车车速信号采集与传输的方法[J].电子世界,2017(12):98.
[3]孙涛,叶金飞.汽车车速信号采集与传输的方法[J].汽车实用技术,2015(06):68-70.
[4]吕亭强,周亮亮,江进,李成岳,赵维伟,张鹏.基于VCU的商用车车速信号处理技术[J].汽车电器,2019(06):42-44.
