一种快速负载前馈控制策略
2020-09-10吴德刚陈乾辉
吴德刚 陈乾辉








摘要:针对传统控制策略无法确保大功率车载充电机前端PWM整流器输入电流的谐波分量低和动态性能高的难题,提出了一种快速负载前馈控制策略,该控制策略利用电容能量反馈提高动态性能,采用系数校正来消除干扰的影响。通过与双闭环控制策略和负载前馈控制策略的对比仿真试验发现,该快速控制策略的性能最优,能够同时达到动态性能高和输入电流谐波含量低的效果。
Abstract: A fast load feedforward control strategy is proposed,aiming at the problems that the traditional control strategy can't ensure the low harmonic component of the input current and high dynamic performance of the system for the PWM rectifier of the high-power vehicle charger.This control strategy uses capacitive energy feedback to improve dynamic performance and uses coefficient correction to eliminate the effects of interference.Through comparative simulation experiments with double closed-loop control strategy and load feedforward control strategy, it is found that the fast control strategy has the best performance.It can achieve the effects of high dynamic performance and low input current harmonic content at the same time.
關键词:大功率;充电机;控制策略;能量反馈;系数校正
Key words: high power;charger;control strategy;energy feedback;coefficient correction
中图分类号:TM912.9 文献标识码:A 文章编号:1674-957X(2020)20-0065-03
0 ; 引言
大功率快速车载充电机是制约电动汽车市场推广的瓶颈,当前车载充电机前级整流器通常采用PWM技术,虽然该技术具有较小的输入电流谐波和较好的动态性能,但面对蓄电池常用的三级充电模式,该技术的动态性能和充电效率将大大降低[1]。针对该问题,许多学者提出了控制策略,比如刘桂花提出通过增大电压环带宽提高其动态性能,同时通过算法抑制输出电压的纹波,但是该算法复杂,耗时长[2];黄静将负载功率引入前馈,但是没有系数校正,因此该方法的鲁棒性不强,动态性易受干扰影响[3]。鉴于此,将电容能量引入前馈控制,并采用系数校正,确保系统具有低输入电流谐波含量和高动态性能。
1 控制原理
1.1 负载功率前馈 车载充电机前级单相PWM整流电路采用全桥形式,电路如图1所示。其中,es为输入电压,L为滤波电感,C为滤波电容,R为电感的寄生电阻,is为输入电流,idc为直流端电流,udc为输出电压,RL为负载。由电路的KVL定律,可得关系如式(1)所示。
式(1)可简化为式(2)和式(3)。
在式(2)两边同乘以is(t),式(3)两边同乘以udc(t)分别得到式(4)和式(5)。
将看成输入功率,看成输出功率,不计中间环节的损耗,输入功率等于输出功率,即:
将式(4)、式(5)、式(6)联立可得:
其中,表示输入功率,用Pin表示;表示电感的存储功率,用PL表示;表示电感的寄生电阻的功率,用PR表示;表示电容的储存功率,用PC表示;表示负载的功率,用PLoad表示。利用功率符号表示,则式(7)可以写成:
考虑到电感的寄生电阻很小,因此PR可以忽略不计,在系统进入稳态时,is(t)恒定,因此电感的存储功率PL为0,虽然系统的动态过程会有一定的变化,但考虑到如果计入PL会造成输入电流的谐波影响控制系统,不计入时影响反而更小,因此将PL忽略不计。综上分析,式(8)可以简化为:(9)
电容功率PC与能量EC之间是微分的关系,因此可以采用式(10)所示的PI调节器,进行控制。
其中,KEP为比例系数,KEI为积分系数,P*C为给定电容功率,E*C为给定电容能量。
根据PC、PRL和ES可计算出输入电流的有效值IS,同时可推导出内环电流给定值I*,分别如式(11)、式(12)所示。
根据上述分析,可设计出控制系统的框图如图2所示。
在该控制系统的设计时,为了提高系统的动态性能,将负载功率反馈到了电流环的前面,但该系统还存在扰动的影响。
1.2 系数校正
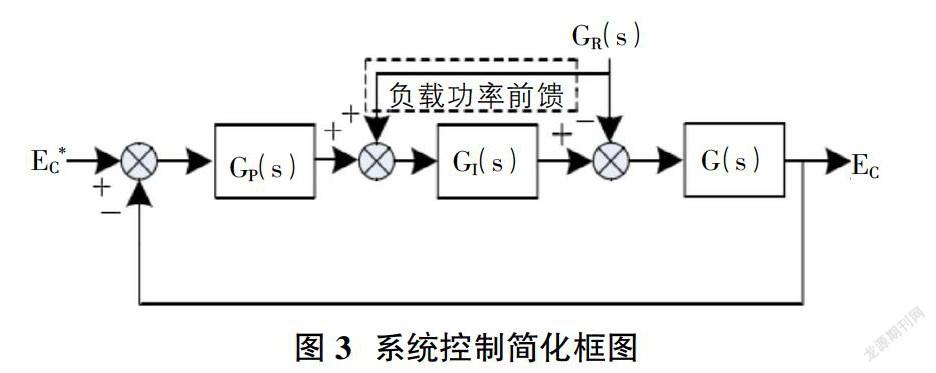
针对系统存在受扰动影响的原因,在负载功率前馈的环节增加系数校正。首先将图2所示的系统控制框图进行简化,简化后的控制框图如图3所示。
其中,GP(s)、GI(s)、G(s)和GR(s)分别表示比例积分环节、内环传函、积分环节和扰动。根据梅逊公式,可写出负载扰动的传函为:负载的扰动功率为:
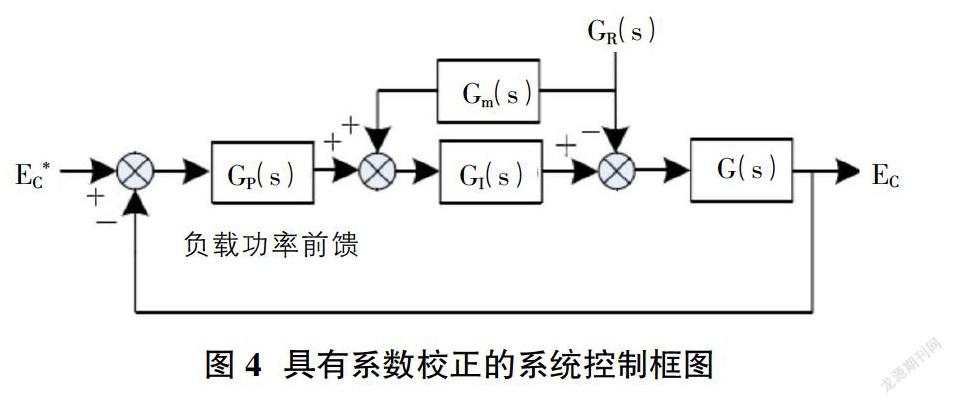
从式(14)可以看出,采用負载前馈之后,扰动干扰较之前减低了,但并未完全消除,因此采用系数校正,使负载扰动的传函变为0,具体做法是在负载功率的前向通道中加入Gm(s)进行系数校正,其系统控制框图如图4所示。
根据梅逊公式,可写出负载扰动的传函为:
令,可推出为:
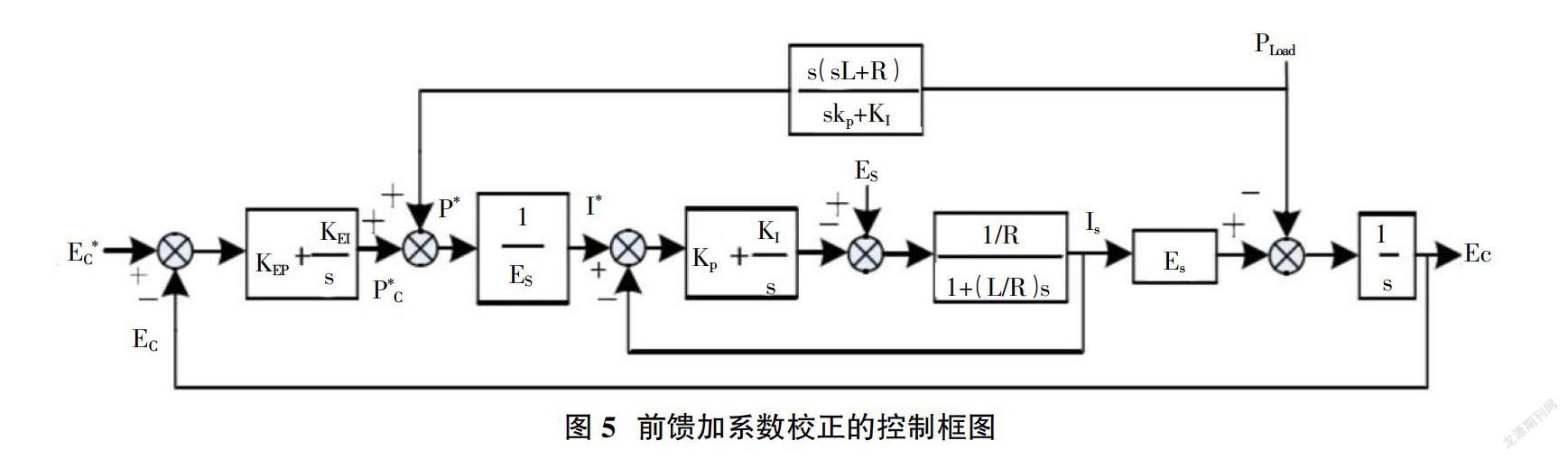
综上分析,可得到前馈加系数校正的控制框图如图5所示。
在电流内环为一阶惯性环节时,前馈校正系数可以简化为。
2 参数整定
图 5所示电路的电流内环的开环传递函数为:
在系统设计时,为了实现快速跟踪电流的目的,一般采用零极点对消法将电流内环的闭环传递函数整定为一阶惯性环节[4-6],其中令■则电流内环的开、闭环传递函数分别为:
其中为惯性时间常数,用Ti表示。
由此,可以得到控制系统电容能量的开环传递函数为:
按照典型Ⅱ型目标函数进行设计[7],Ⅱ型目标函数为:(21)
其中,,,将式(20)和式(21)对比,可以得到T=Ti,按照Ⅱ型系统设计的经验,中频带宽取值为5,由此可以得到电容环的比例、积分参数分别如式(22)、式(23)所示。
3 仿真分析
为了更加清晰的看出文中提出的快速控制策略的性能,将其与电压电流双闭环、负载功率前馈两种控制策略进行对比分析。
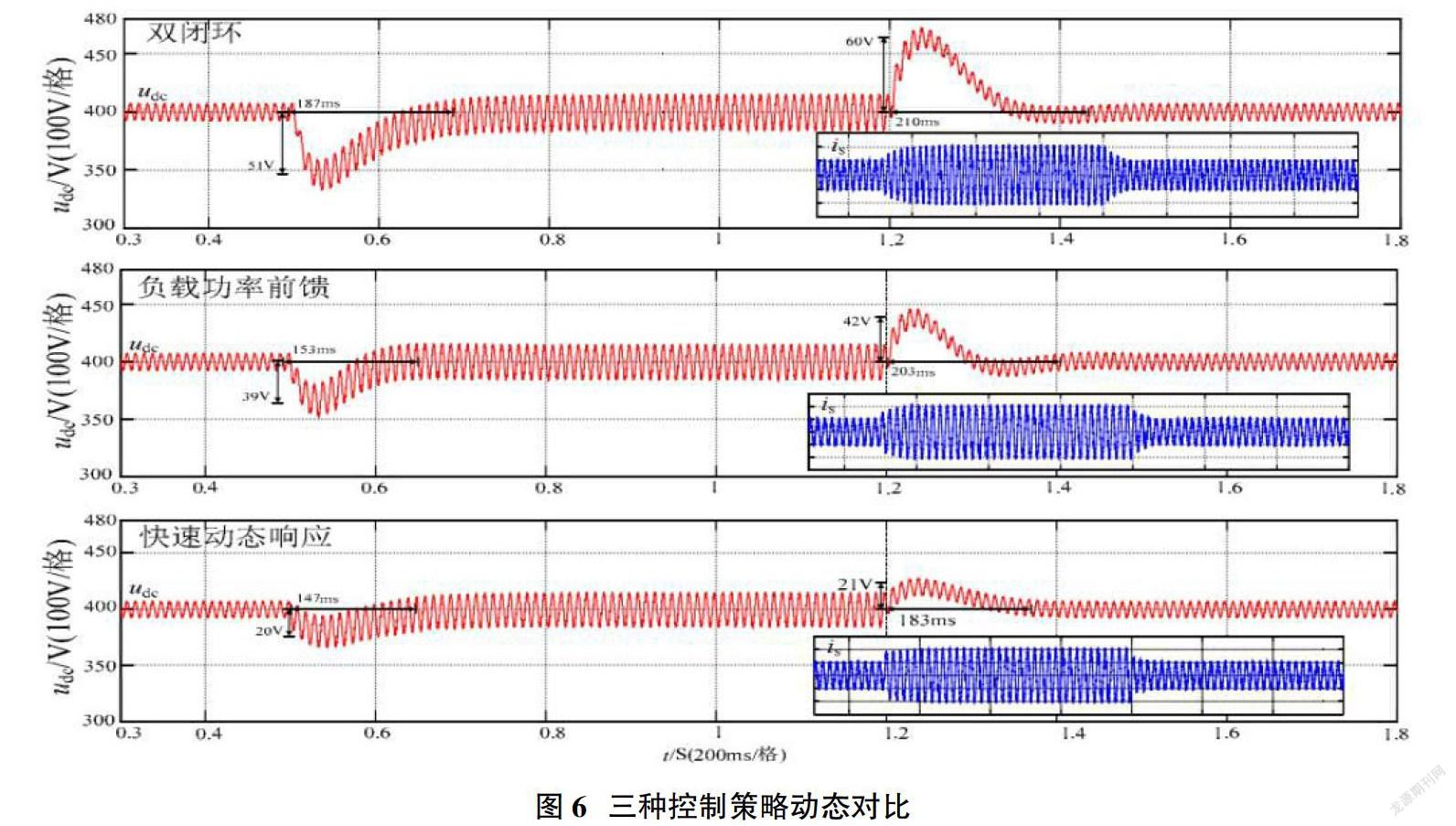
采用快速控制、电压电流双闭环控制、负载功率前馈控制三种策略,针对系统的干扰动态特性进行仿真对比分析,其干扰动态特性对比结果分别如图6所示。
从图6可以看出,三种控制策略中,快速控制策略的THD最小,输入电流的谐波含量最少;在0.5s处有一扰动,三种控制策略中,快速控制策略的鲁棒性最好,即受干扰影响超调量最小,响应时间最短。综合分析,快速控制策略采用电容能量前馈加系数校正能够确保控制系统的输入电流谐波含量少,动态性能好。
4 结束语
针对车载充电机的前级AC-DC整流器,将电容能量引入前馈,达到了降低输入电流谐波含量的目的,采用系数校正缩短了动态调整时间,降低了超调量,提高了系统的动态性能。
参考文献:
[1]王虎,高桂芬.电动汽车车载充电机的研究与设计[J].长春工业大学学报,2018,39(4):356-361.
[2]刘桂华,王卫,徐殿国.具有快速动态响应的数字功率因数校正算法[J]. 中国电机工程学报,2009,29(12):10-15.
[3]黄静,杨柏旺,吴志清,等.基于负载功率前馈控制的PWM整流器控制策略[J].电力电子技术,2014,48(11):57-62.
[4]姜卫东,李王敏,佘阳阳,等.直流电容储能反馈和负载功率前馈的PWM整流器控制策略[J].电工技术学报,2015,30(8):151-158.
[5]吴延好,聂子玲,朱俊杰.具有谐波补偿功能的中频PWM整流器研究[J].海军工程大学学报,2019,31(2):67-71.
[6]张军,杨瑞.电动汽车车载充电机的研究及设计[J].电子设计工程,2016,24(20):133-136.