基于高速动车组网络的牵引电机控制研究
2020-09-10王元东王元亮宋程王作航徐滨全
王元东 王元亮 宋程 王作航 徐滨全
摘要:本文首先建立基于高速动车组网络的牵引电机控制模型。然后针对高速动车组交流异步牵引电机的非线性及强耦合特征,对牵引电机非线性模型使用逆系统法将其解耦为转子磁链与转子转速两个线性子系统,将线性化后的牵引电机模型引入列车通信控制网络(Train Communication Network,TCN)之中,并使用动态输出反馈控制法设计牵引电机的网络控制器。最后进行实验,实验结果证明:本文采用动态输出反馈控制法设计的网络控制器比把PD控制器作为网络控制器的方法更好,既可快速地实现转速与转子磁链的动态解耦也可使牵引电机的转速更平稳且转子磁链曲线的超调量更小。
关键词:高速动车组;牵引电机;TCN;网络控制器;网络时延
中图分类号:U266.3 文献标识码:A 文章编号:1674-957X(2020)20-0063-02
0 引言
交流异步牵引电机已被广泛地应用于高速动车组的研制中。当前,高速动车组的牵引控制是通过TCN来实现的[1]。但TCN也给异步电机牵引系统带来了网络时延,使得对异步电机牵引控制系统的设计较困难。当前的网络控制分析方法主要集中在线性系统领域,故要实现异步牵引电机的网络化控制,就必须解决异步牵引电机线性化解耦的问题。本文针对以上问题,考虑不确定的网络时延,采用逆系统法实现了转子磁链与转速的动态解耦控制。
1 基于高速动车组网络的牵引电机逆解耦控制模型
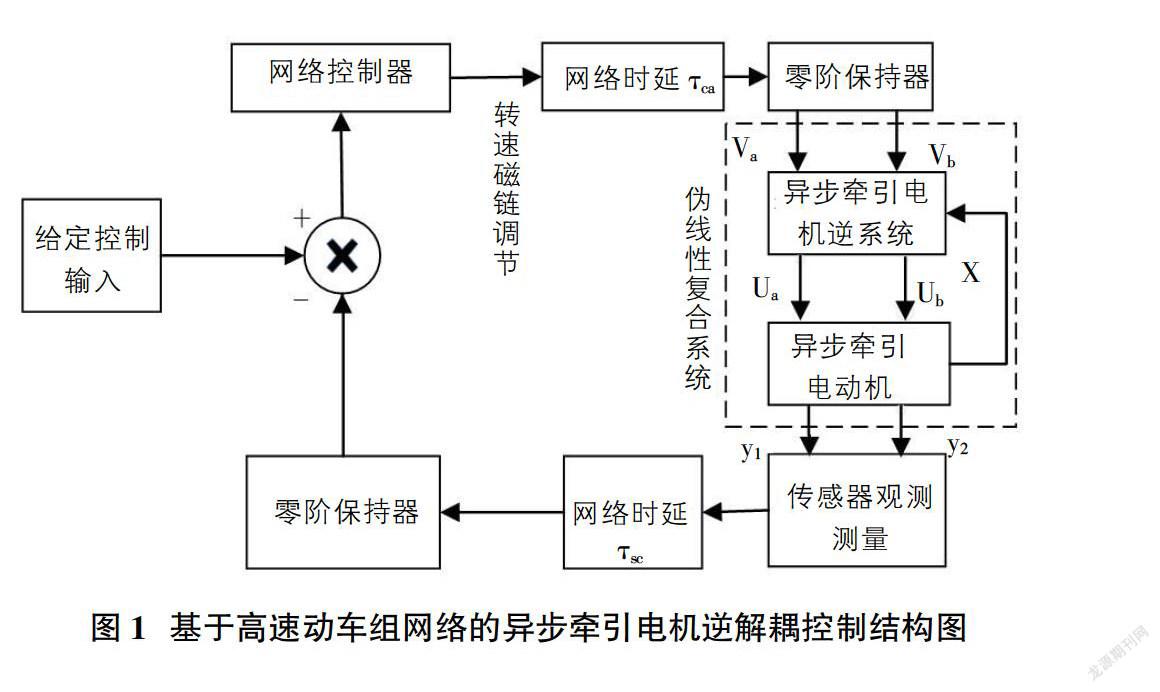
本文所研究的基于高速动车组网络的异步牵引电机控制结构可分为:牵引电机伪线性复合系统、具有不确定时延的列车通信控制网络、网络控制器,如图1所示。
1.1 高速动车组网络控制系统与不确定的时延 当前,研究表明高速动车组网络控制系统存在时延,传感器到控制器及控制器到执行器均存在时延[2]。时延是导致系统不稳定的重要因素。设?子sc与?子ca分别表示传感器到控制器的时延、控制器到执行器时延。控制器与执行器均由事件驱动,系统存在不确定时延,控制率一定时,传感器到控制器的时延和控制器到执行器时延可写为?子k=?子sc+?子ca。0?燮?子min?燮?子k?燮?子max?燮T,其中?子max与?子min为常数,T为采样周期。
1.2 基于高速动车组网络的牵引电机控制模型 牵引电机的驱动系统根据网络控制器提供的转子转速控制信号va与转子磁通控制信号vb,使牵引电机输出转速与磁链幅值精确地跟踪参考信号。网络化的牵引电机控制系统状态空间可描述为:
其中:
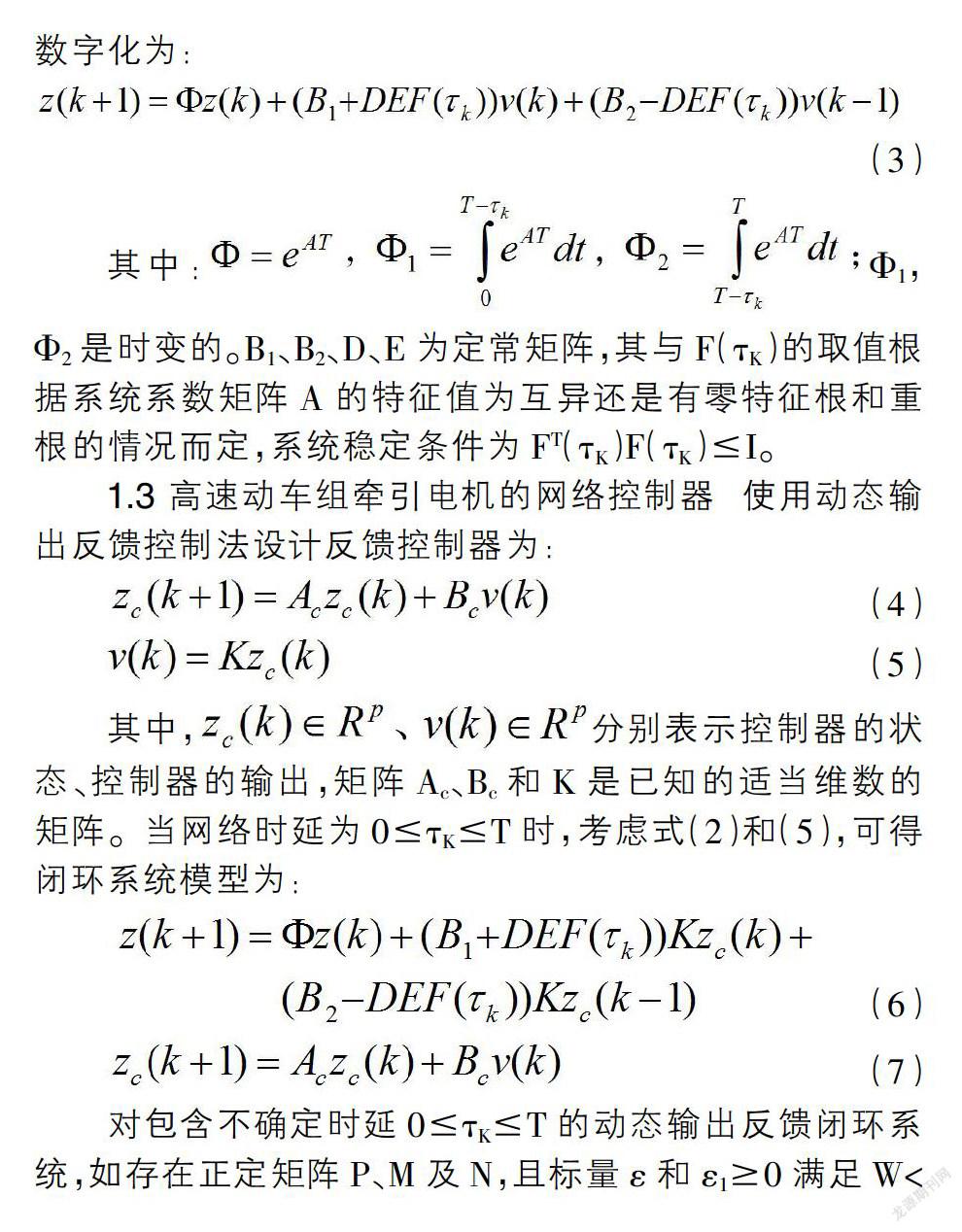
采样周期为T,网络化的异步牵引电机控制系统可被数字化为:
其中:椎1,?椎2是时变的。B1、B2、D、E为定常矩阵,其与F(?子K)的取值根据系统系数矩阵A的特征值为互异还是有零特征根和重根的情况而定,系统稳定条件为FT(?子K)F(?子K)?燮I。
1.3 高速动车组牵引电机的网络控制器 使用动态输出反馈控制法设计反馈控制器为:
其中,分别表示控制器的状态、控制器的输出,矩阵Ac、Bc和K是已知的适当维数的矩阵。当网络时延为0?燮?子K?燮T时,考虑式(2)和(5),可得闭环系统模型为:
对包含不确定时延0?燮?子K?燮T的动态输出反馈闭环系统,如存在正定矩阵P、M及N,且标量?着和?着1?叟0满足W<0,则对任意满足■条件的不确定时延,闭环系统是稳定的。
2 实验与结果分析
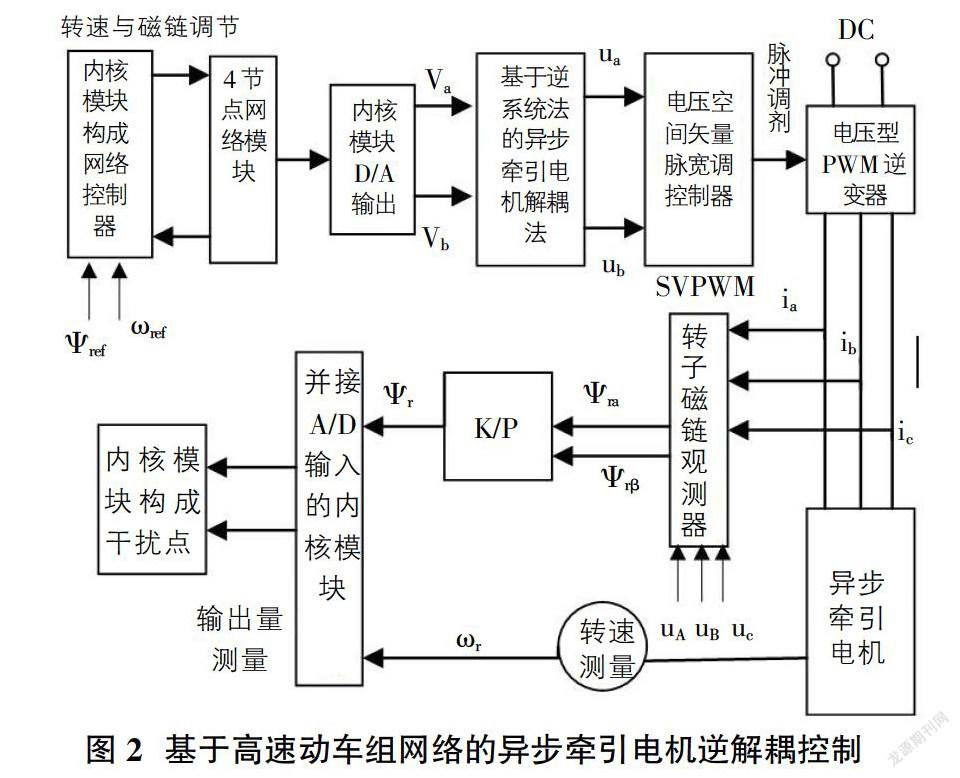
本文将基于TCN标准的高速动车组的交流异步牵引电机作为研究对象,实验中所用软件为MATLAB。交流异步牵引电机的相关参数如下:额定电压为2.75 kV,额定功率为562 kW,额定频率为138 Hz,转子漏电感为1.91 mH,定子漏电感为1.42 mH,互感为53.7 mH,极对数为2,磁链给定?鬃ref=1.52Wb,转速给定?棕ref=205rad/s,系统实验的结构框图,如图2所示。
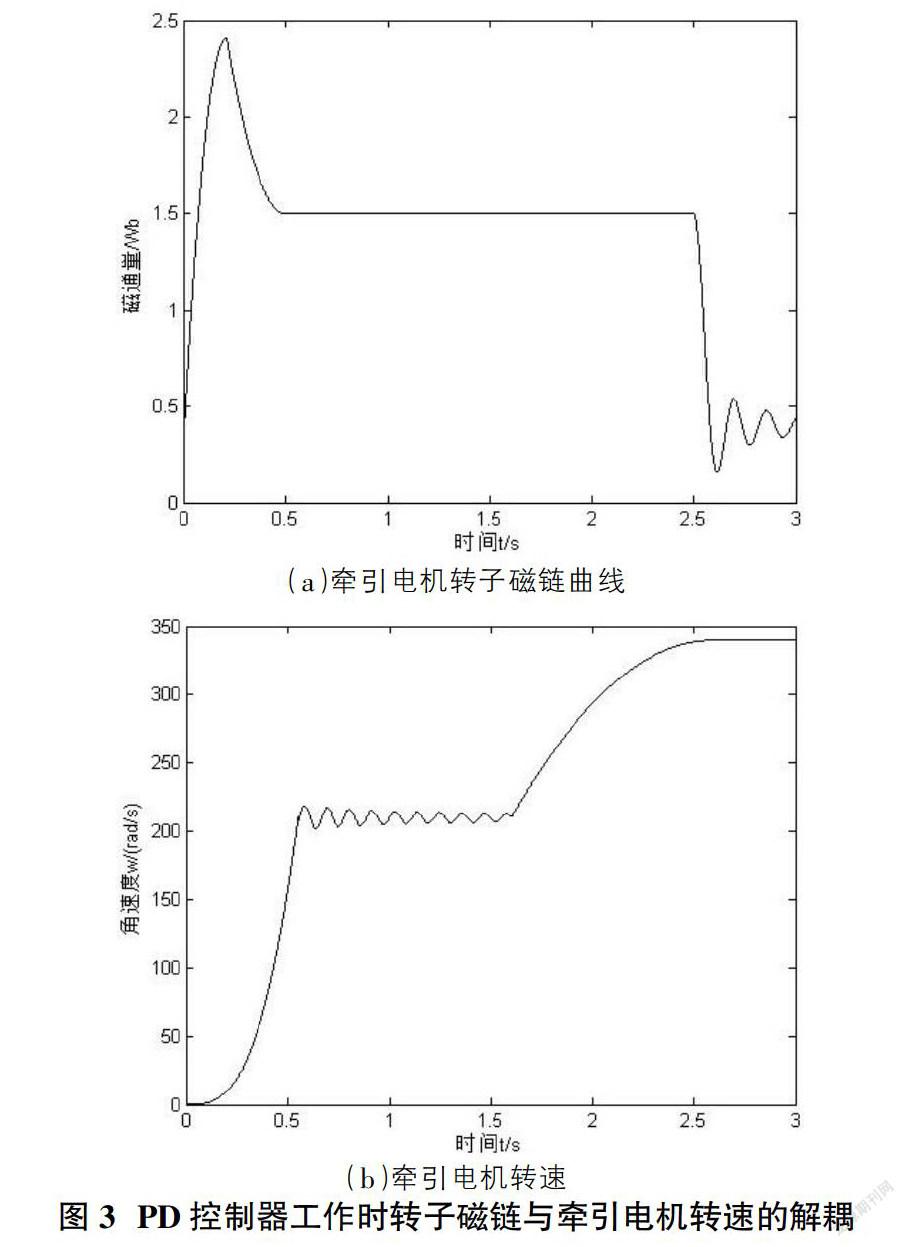
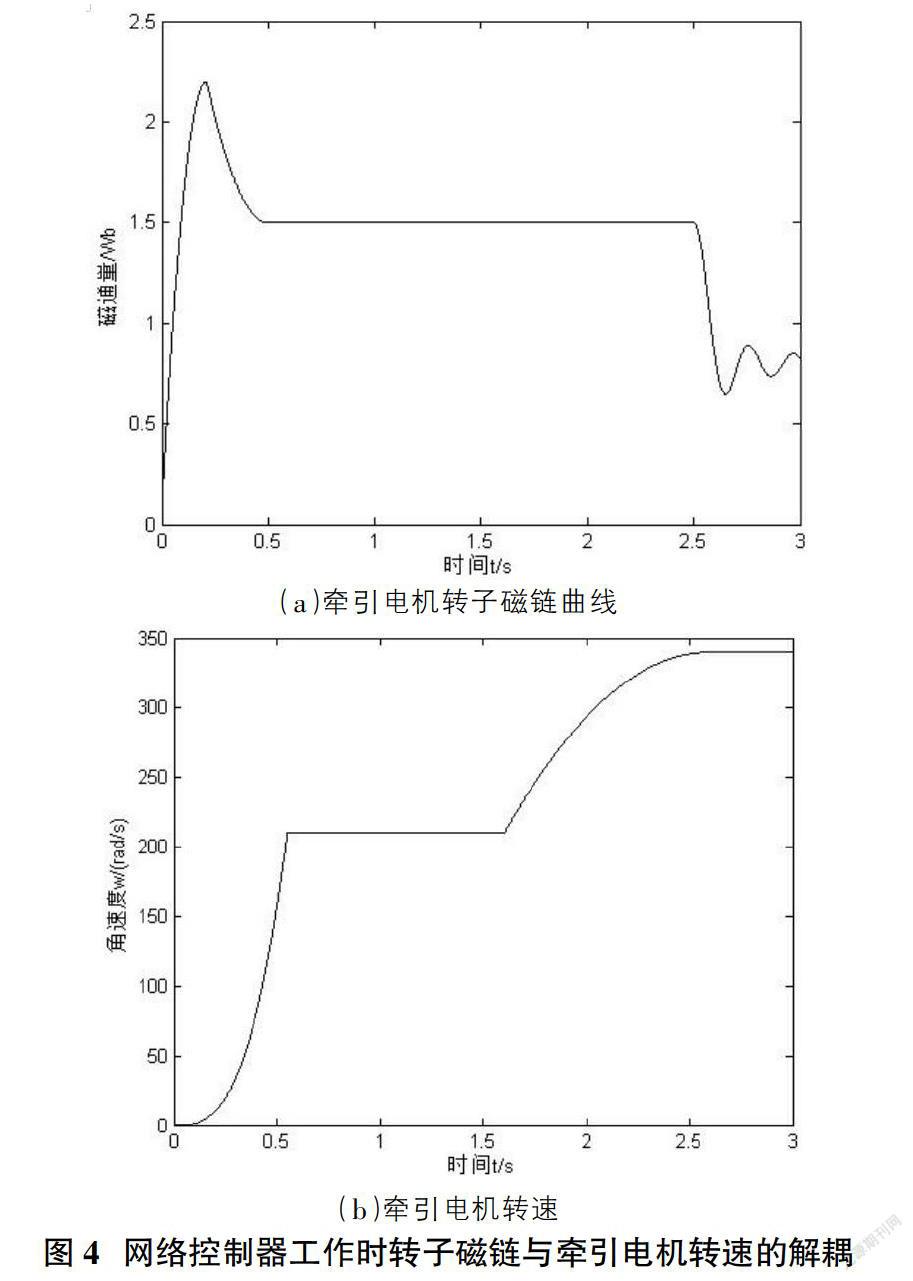
当采用PD控制器补偿网络时延对系统的影响时[3],采样周期为0.01s。转子磁链幅值与转速初始值分别为?鬃ref=1.5Wb及?棕ref=205rad/s,在t=1.5s时给定转速变为?棕ref=314rad/s,而转子磁链幅值在t=2.5s时,磁链为?鬃ref=0.8Wb,转子磁链及转速的输出响应分别如图3(a)、3(b)所示。当采用式(5)所述的网络控制器来补偿网络时延对系统的影响时,转子磁链及转速的输出响应分别如图4(a)、4(b)所示。由图3(a)与图4(a)可知:当采用PD控制器时,牵引电机转子磁链曲线的超调量较大且在25s后转子磁链曲线振荡很剧烈,但当采用本文所提出的网络控制器时,牵引电机转子磁链曲线的超调量明显减小且转子磁链曲线振荡的程度显著地得到改善。由图3(b)与图4(b)可知:当采用PD控制器时,牵引电机转速曲线有明显的振荡且趋于稳定的时间较长,但采用本文所提出的网络控制器时,牵引电机转速曲线较平稳且趋于稳定的时间明显变短。
3 结语
本文应用逆系统法对具有非线性、强耦合的异步牵引电机模型进行线性化解耦,然后考虑存在不确定网络时延的情况,使用动态输出反馈控制法设计反馈控制器。结果表明:本文所提出的方法可快速地实现转速与转子磁链的动态解耦,所设计的网络控制器比PD控制器对有网络不确定时延的系统具有更好的控制效果。
参考文献:
[1]HESPANHAJP,NAGHSHTABRIZI P,XU Y G.Asurvey of recent results in networked control systems[J]. Proceedings of the IEEE, 2007, 95(1):138-162.
[2]馮晓云.电力牵引交流传动及其控制系统[M].北京:高等教育出版社,2009.
[3]SeppoSaarinen.WabtecECP Brake System[Z].Chicago:AnnualTechnicalConference,2000.