基于MATLAB与AMESim的电液伺服系统PID控制器设计
2020-09-10于小庆
于小庆

摘要:电液伺服系统在制造业、工程机械、机器人等众多领域均有应用,是目前液压驱动高精度运动控制主要控制方式。在电液伺服系统设计时,为了能够知晓系统的静动态特性,可采用计算机仿真技术,进行电液伺服系统的建立,控制算法的计算。AMESim提供了一套电液伺服仿真建模与分析的解决方案,可与MATLAB进行连接,充分发挥MATLAB的算法运算能力。建立电液伺服系统传递函数模型,控制算法模型为电液伺服控制提供理论基础,建立一种变幅机构的联合仿真模型,采用PID控制方式,进行机构位置保持能力测试,结果表明建立的模型正确,达到了预期效果。
Abstract: The electro-hydraulic servo system is widely used in many fields, such as manufacturing industry, construction machinery, robot and so on. In the design of electro-hydraulic servo system, in order to know the static and dynamic characteristics of the system, computer simulation technology can be used to establish the electro-hydraulic servo system and calculate the control algorithm. AMESim provides a set of solution for modeling and analysis of electro-hydraulic servo simulation, which can be connected with MATLAB and give full play to the algorithm operation ability of MATLAB. The transfer function model of the electro-hydraulic servo system is established, and the control algorithm model provides the theoretical basis for the electro-hydraulic servo control. A joint simulation model of the luffing mechanism is established. The PID control method is used to test the position holding ability of the mechanism. The results show that the model is correct and achieves the expected effect.
关键词:电液伺服系统;仿真技术;AMESim;MATLAB;PID控制
Key words: electro hydraulic servo system;simulation technology;AMESim;MATLAB;PID controler
中图分类号:TH137.52;V249 文献标识码:A 文章编号:1674-957X(2020)20-0055-02
0 引言
机电液系统应用广泛,适合需要大力矩工作的场合,如多种机床、航天器械、工程机械等[1,2]。在对运动或动力精度要求较高的场合,往往需采用电液伺服控制系统[3],一般都包含了比较元件、放大器、转换器、执行元件、负载、传感器等组件。AMESim提供了较为丰富的电液伺服控制系统解决方案,可进行电液伺服的液压系统建模。在控制算法方面,PID控制技术逐渐成熟,随着计算技术的发展,数字PID控制器得到了更多应用。曹昌勇[4,5]等在汽车减振器性能检测系统中,运用模糊PID控制算法,采用MATLAB进行程序的编制,结果表明系统工作平稳,达到了较好的控制效果。付甜甜[6]等根据MATLAB和AMESim各种的优势,采用模糊PID控制器,完成了液压系统模型的建立与控制器设计,对系统进行联合仿真,结果表明模糊PID控制器在电液伺服控制方面具有更高的速度和精度。
1 伺服系统与控制器软件实现
1.1 伺服与控制算法模型
電液伺服系统主要建立伺服阀和伺服缸的数学模型。在多数系统中,可将伺服阀的传递函数简化为一个二阶振荡环节:
式中,K为伺服阀的流量增益;?棕sv为伺服阀的固有频率;?孜sv为伺服阀阻尼比。
伺服缸传递函数为:
式中,Ap为活塞有效面积;?茁e为有效体积弹性模量;FL为活塞外负载力;K为负载弹性刚度;Kq为伺服阀流量增益;Bp为粘性阻尼系数;mt为活塞及负载折算到活塞上的总质量;Kce为总流量-压力系数。
PID控制器主要包括比例、微分和积分项,其控制规律为[7]:
式中,u为控制器的输出;e信号偏差;kp为比例系数;TI为积分时间常数;TD为微分时间常数。
1.2 AMESim液压系统仿真
AMESim主要包括流体系统、电气系统、电机系统、热系统、机械系统和信号系统,已在多个工业领域得到应用,通过图形化界面调取元件。其中流体系统中包括了多种流体单元,包括流体设置单元、管道、过滤器、蓄能器、液压缸、液压泵、恒压泵、液压阀等。液压缸包括单作用液压缸、双作用液压缸、带负载的单作用液压缸、有弹簧辅助的单作用液压缸等。液压泵包括定量泵、变量泵等,可与液压阀进行组合连接形成变量柱塞泵等。液压阀模块包括单向阀、两位三通阀、三位四通阀、减压阀、调速阀、梭阀、三位四通电液伺服阀等。
机械系统模块包括机架、电动机齿轮等多种常见机械设备。其中的3D机械模型库将平面机械结构转为三维机械结构模型,可更加真实地模拟物理系统。信号系统模块包括信号发生器、传递函数块、函数块、滤波器等。其中传递函数块基于模型的传递函数;函数块可设置一个函数模型;滤波器可设置为低通、高通或带通滤波器等。AMESim用较少的要素完成复杂的系统模型,通过图形界面实现对仿真模型的扩充以及改变,摆脱了复杂的数学建模,注重系统本身的物理模型。
1.3 MATLAB Simulink控制器设计
70年代中期,Cleve Moler博土及其同事开发了基于FORTRAN语言的LINPACK和EISPACK子程序库,其名称是由MATrix和LABoratory两个单词的前三个字母所合成。MATLAB经过了几十年的发展,其形成了以高性能的数组运算能力,实现了众多高效运行的函数,且提供了非常高效的编程语言与二次开发环境,已广泛应用于科学研究、数值计算、系统建模与仿真等。MATLAB Simulink是窗口图形方式的、专门用于连续或离散时间的系统建模仿真,同时提供了与AMESim联合的接口。
在MATLAB Simulink环境下可建立电液伺服控制系统的控制算法运算模型,在Simulink中可调用与AMESim连接的接口,通过编译AMESim中的MATLAB接口块可生成接口文件,将接口文件导入Simulink的接口块即可完成连接。
2 变幅机构模型建立
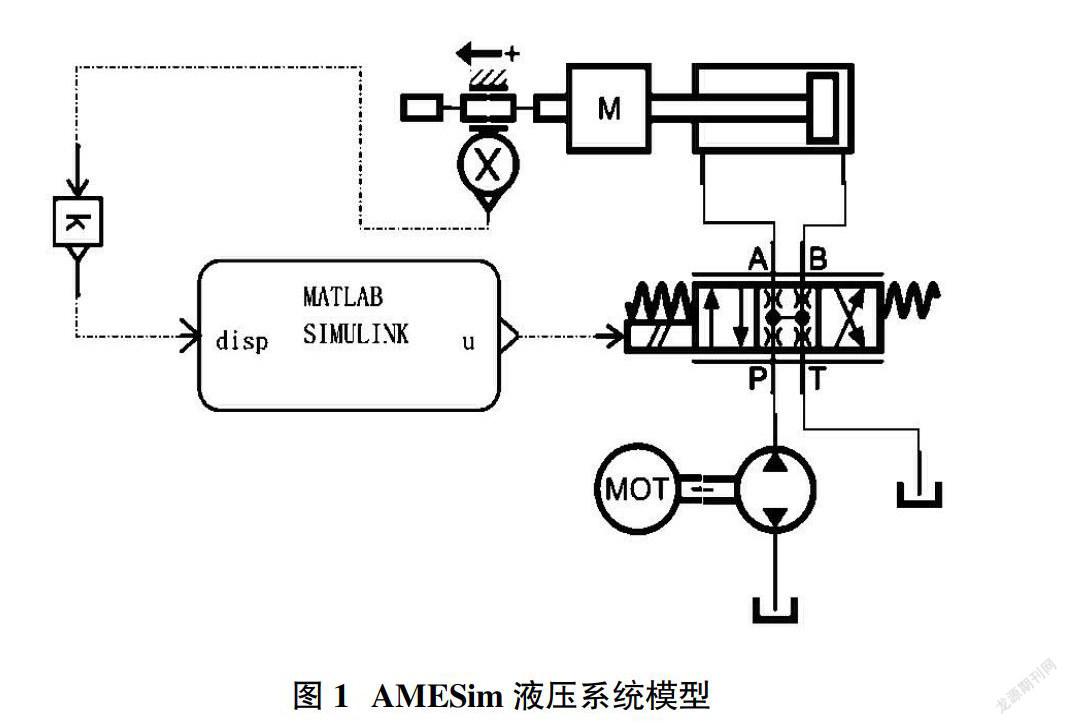
如图 1所示,某变幅机构的AMESim液压系统模型,采用带负载的单作用液压缸模型,三位四通电液伺服阀模型,定量泵模型,采用一个唯一传感器进行活塞杆位移的测量,测量输出经过一个比例增益环节,通過设置比例系数实现不同单位量级之间的转换。MATLAB接口的输入为液压缸活塞杆运动位移,输出为经过PID控制算法运算后的输出,输出到伺服阀,从而控制伺服阀的动作。
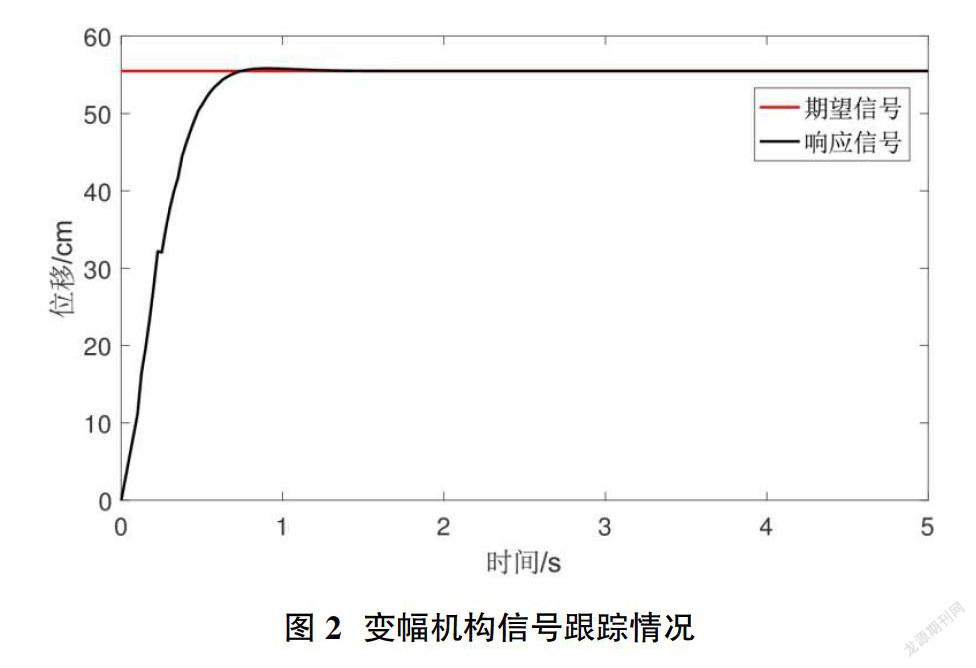
设置活塞杆运动情况为从初始位置运动到55.5cm处,并保持该位置一段时间。从MATLAB启动仿真运行,仿真结果如图 2所示。由图2可知,活塞杆从初始0cm位置逐渐过渡到期望的55.5cm位置,稳态阶段之前有一小段的振荡产生,但振荡幅值较小,在稳态阶段,系统的响应与期望信号几乎重合,控制精度非常高,达到了预期的设计目的。
3 结束语
本文针对电液伺服系统及其应用,介绍了能够进行电液伺服系统仿真的AMESim软件,以及能够进行控制算法运算的MATLAB软件。在AMESim中建立了某种变幅机构的液压系统模型,通过接口技术与MATLAB进行连接,采用PID控制算法进行伺服缸运动控制,结果表明所设计的控制系统具有较高精度的跟踪效果,到达了设计预期,可为相关系统设计与优化提供参考。
参考文献:
[1]朱小晶,权龙,王新中,等.大型液压挖掘机工作特性联合仿真研究[J].农业机械学报,2011,42(04):27-32.
[2]刘鹏虎,张勇,张强.液压挖掘机工作装置的动力学分析及控制[J].中国工程机械学报,2007(01):72-74,112.
[3]吕安生.抓臂式清污机设计与关键技术研究[D].合肥工业大学,2019.
[4]曹昌勇,林华,王子权,等.汽车减振器性能检测伺服模糊PID控制研究[J].佳木斯大学学报(自然科学版),2018,36(06): 917-920.
[5]曹昌勇,林华,王洪新,等.电液伺服滑模消抖控制差分优化研究及仿真[J].洛阳理工学院学报(自然科学版),2019,29(02): 30-34,41.
[6]付甜甜,朱玉川,顾亚军.基于MATLAB-AMESim的电液伺服系统模糊PID控制[J].机床与液压,2016,44(20):144-146,154.
[7]徐宇宝,林华,王子权.基于STM32智能温控自调速风扇PID控制研究[J].齐齐哈尔大学学报(自然科学版),2018,34(05): 7-11,18.