基于可拓控制理论的智能车辆主动转向控制方法
2020-09-10陈丹
陈丹



摘要:本文将可拓控制理论运用到智能车辆主动转向控制中,达到了一定的响应结果,满足了智能车辆主动转向的使用要求,具有一定的主动转向控制稳定性和精确性,可拓控制考虑事物本身及其特征以及它们的变换,将矛盾问题转化为相容问题,扩大了控制范围,保证车辆主动转向时的快速响应和平稳转向。
关键词:可拓控制理论;智能车辆;控制方法
0 引言
智能车辆作为智能交通的重要组成,提高了现代城市生活的水平,于此同时也是解决目前交通安全的重要方式,其发展具有重要意义。智能车辆主动转向控制是智能车控制的一个重要部分,现阶段已经提出了许多控制方式,例如:PID控制、自适应控制、滑模控制以及预测控制,但是这些控制算法都存在着稳定性、准确性、快速性以及可靠性差的问题;因此稳定型、创新型、高精度型控制系统越来越受到各界关注和研究。
可拓控制论是指利用可拓论与可拓方法研究处理控制过程中的矛盾问题的规律和方法,它是为了解决传统控制方法不能控制的问题而提出并发展起来的。在传统控制中,输入与输出均是量值,控制模型是数学模型,它们描述控制过程中输入量值与输出量值之间的关系。在有些控制问题中,仅考虑量值与量值之间的关系是难以解决的,它们也形成了控制中的矛盾问题。要解决它们,就必须考虑事物本身及其特征以及它们的变换。
可拓控制论把可拓学引入智能控制的研究领域,用它们来描述和处理控制过程中信息的转化关系,这就为寻求智能控制和知识表达模型以及信息处理技术开辟了新的途径。
车辆控制是一个实时性强、干扰因素复杂、控制参数耦合性高的系统,控制参数之间常常存在难以同时满足要求的矛盾问题,出现求解失败或是失控的情况。可拓控制具有将矛盾问题转化为相容问题的特点,摆脱了常规控制的局限性,在原有控制区域的基础上,对控制区域进行拓展;并且不会受到具体控制方法的制约,在全局控制区域划分的前提下,在不同的控制区域可以根据需要采用不同的控制输出方式,达到更加精确的控制结果。
1 控制方法的步骤
本文的研究方法主要包括以下步骤:S1,以整车二自由度动力学模型作为参考模型,建立二自由度动力学微分方程;S2,设计智能车辆主动转向控制算法;控制算法的输入为车辆前轮转角δf,輸出为侧向速度vy和横摆角速度wr;选取整车二自由度动力学微分方程中的状态量侧向速度vy和横摆角速度wr,将其作为可拓控制器的特征量,选取特征量侧向速度vy和横摆角速度wr的容许范围和最大可调范围,将车辆行驶过程划分为可拓控制区域和经典控制区域,具体为:
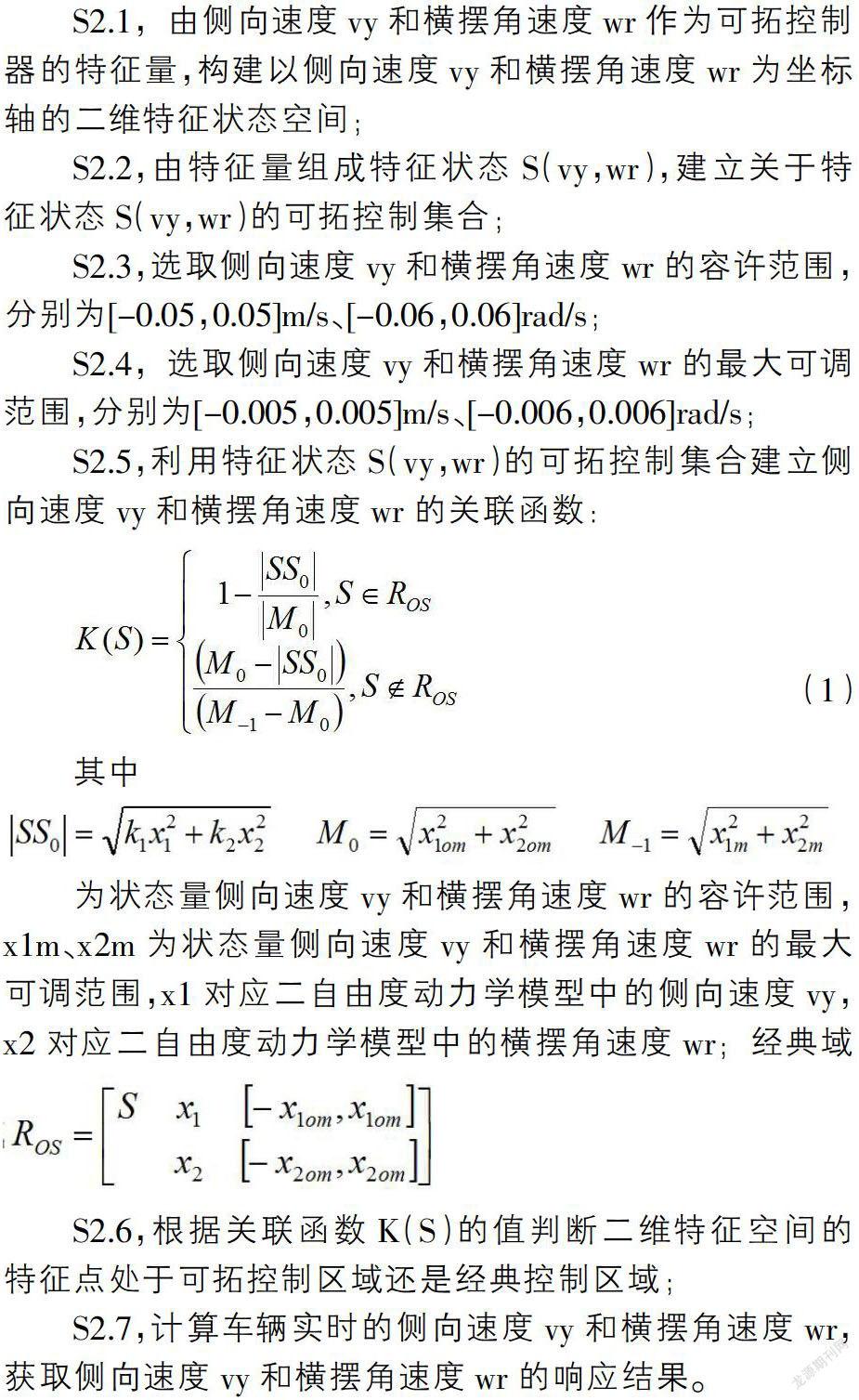
S2.1,由侧向速度vy和横摆角速度wr作为可拓控制器的特征量,构建以侧向速度vy和横摆角速度wr为坐标轴的二维特征状态空间;
S2.2,由特征量组成特征状态S(vy,wr),建立关于特征状态S(vy,wr)的可拓控制集合;
S2.3,选取侧向速度vy和横摆角速度wr的容许范围,分别为[-0.05,0.05]m/s、[-0.06,0.06]rad/s;
S2.4,选取侧向速度vy和横摆角速度wr的最大可调范围,分别为[-0.005,0.005]m/s、[-0.006,0.006]rad/s;
S2.5,利用特征状态S(vy,wr)的可拓控制集合建立侧向速度vy和横摆角速度wr的关联函数:
为状态量侧向速度vy和横摆角速度wr的容许范围,x1m、x2m为状态量侧向速度vy和横摆角速度wr的最大可调范围,x1对应二自由度动力学模型中的侧向速度vy,x2对应二自由度动力学模型中的横摆角速度wr;经典域
S2.6,根据关联函数K(S)的值判断二维特征空间的特征点处于可拓控制区域还是经典控制区域;
S2.7,计算车辆实时的侧向速度vy和横摆角速度wr,获取侧向速度vy和横摆角速度wr的响应结果。
2 控制方法内容
采用整车二自由度动力学模型作为参考模型建立仿真模型,建立整车二自由度参考模型需要如下假设:①忽略转向系统的影响,直接以前轮转角δf作为输入;②忽略悬架的作用,即车辆绕z轴的位移、绕y轴的俯仰角、绕x轴的侧倾角均设为0,从而达到忽略悬架的目的;③车辆沿x轴的前进速度u视为不变;④车辆侧向加速度ay<0.4g,g为重力加速度;⑤车辆轮胎侧偏特性处于线性范围。
如图1所示的整车二自由度动力学模型,通过牛顿第二定律和力矩平衡可得到二自由度动力学微分方程为:
式中:m为整车质量;Iz为车辆绕z轴的转动惯量;kf、kr分别为前后轮的侧偏刚度;δf为前轮转角;a、b分别为前后轴距离车辆质心的距离;u为车辆前进的纵向速度;vy为车辆侧向速度;ωr为车辆的横摆角速度;β为车辆质心侧偏角。
对式(1)化简可以得到整车二自由度动力学状态空间方程:
基于上述建立的二自由度动力学状态空间方程,进行可拓控制特征量的抽取:选取整车二自由度动力学模型中的侧向速度vy和横摆角速度wr作为可拓控制器的特征量,组成特征状态S(vy,wr)。
将整车二自由度动力学模型作为控制的参考模型,状态量侧向速度vy(x1)和横摆角速度wr(x2)的容许范围x1om、x2om值分别为[-0.05,0.05]m/s、[-0.06,0.06]rad/s;状态量侧向速度vy和横摆角速度wr的最大可调范围x1m、x2m 分别为[-0.005,0.005]m/s、[-0.0006,0.0006]rad/s,建立关于特征状态S(vy,wr)可拓控制集合:经典域
可拓域在上述所建立的可拓控制集合的基础上计算x1、x2的关联函数K(S),选取侧向速度vy和横摆角速度wr作为特征量,由此构成了以侧向速度和横摆角速度为坐标轴的二维特征空间,特征空间如图2所示,二维特征空间的原点为S0(0,0),定义:
则特征空间中的每一个特征点S(x1,x2)满足关联函数:
最后根據上述都每个特征状态点在二维特征空间中所处的位置,采用不同的输出计算方式:
其中:v为系统的参考输入,kcM1为M1测度模式下的状态反馈系数,这里状态反馈系数采用的是极点配置的方法,解决输出相应过程中的精度问题;极点配置选择极点-2±4j,从而得到反馈系数的值为-0.4014、-0.0507。
其中:kcM2为M2测度模式下的状态反馈系数,这里状态反馈系数采用的是极点配置的方法,解决输出相应过程中的稳定问题;极点配置选择极点-5、-1,从而得到反馈系数的值为-0.1856、-0.2442。
M3:输出最大容许幅值UM
基于上面的控制方法,在Simulink中搭建仿真模型,采用单位阶跃输入作为控制的参考输入,采用单位负反馈形成闭环控制,考虑整车二自由度动力学模型中侧向速度vy和横摆角速度wr在单位阶跃输入下的响应情况。通过搭建仿真模型,得到图3的仿真结果,车辆侧向速度vy和横摆角速度wr在单位阶跃输入下,经过可拓控制的控制,保证了侧向速度vy和横摆角速度wr在较短时间内达平衡状态,即在车辆以一定前轮转角的输入下,车辆能够迅速调整侧向速度和横摆速度达到稳定值,避免出现车辆失稳的状态;仿真结果验证可拓控制理论应用在智能车辆主动转向中具有一定的可行性。
3 控制方法的优点
可拓控制从信息转换角度处理控制问题,以控制输入信息的关联度K(S)作为确定控制输出校正量的依据,能够使得智能车辆主动转向控制的参变量从不可控区域转换成稳定可控区域,摆脱了车辆动力学模型复杂性或控制方法使用条件受限等因素的制约,提高了智能车辆的主动转向控制的能力。
车辆是一类典型的多输入多输出、耦合、非线性复杂动力学系统,本文通过计算特征量侧向速度vy和横摆角速度wr对应的关联函数K(S)值,对原控制区域进行拓展,对全局控制区域进行划分,将二维特征空间中各个特征点划分到经典域、可拓域和非域中,在不同的控制区域内根据控制功能的不同实施相对应的不同的控制策略,达到较为理想的控制效果,从而将传统控制中只能在经典域控制的问题拓展到可拓域,很好地解决了智能车辆在主动转向控制过程中出现的稳定性问题和精确性问题,改善现有的主动转向控制技术。
参考文献:
[1]胡林冰.控制工程在机械电子工程中的应用[J].内燃机与配件,2018(1):232.
[2]栾婷婷.基于智能控制工程在机械电子工程中的应用分析[J].山东工业技术,2018(14):164.
[3]郑红涛,姜信君.控制工程在机械电子工程中的应用[J].居舍,2018(14):166.
[4]欧屹.MROBOT机械系统设计与动力学分析研究[J].南京理工大学,2006.
[5]高晓燕.多用途特殊移动作业机器人机械系统设计与分析研究[J].南京理工大,2007.
[6]杨晓光.机器人机械动力学系统的广义同步研究[J].东北大学,2007.