大水位差码头船用岸电的PLC控制系统研究
2020-09-10陈泽鹏
陈泽鹏
福建肖厝港物流有限责任公司, 福建泉州 362801
摘要:在我国很多大水位码头应用岸电技术时,码头接电口、电缆长度等很难适应水温差变化,为此,相关部门需要借助于PLC控制系统,将上述问题解决。本文根据以往工作经验,对大水位差码头岸电控制方案进行总结,并从PLC控制系统硬件电路设计、PLC控制系统软件程序设计两方面,论述了大水位差码头船用岸电的PLC控制系统内容。
关键词:大水位差码头;船用岸电;PLC控制系统
在我国,内河港口之中应用船用岸电技术,能够尽可能避免内陆城市空气污染程度,降低船舶靠泊时的噪音,并降低靠港船舶的运营成本,让船用岸电技术在内河港口空白状态下得到应用。例如,在三峡库区典型大水位差直立式码头运行过程中,主要是对控制岸电的接电口位置控制系统进行研究,通过水位传感器了解水位信息,之后通过主控制器PLC控制电缆卷筒收放,将岸电接电口位置更改。
1.大水位差码头岸电控制方案
1.1岸电控制方案总体设计
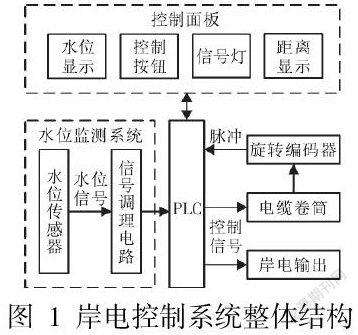
从大水位差码头运转过程中能够看出,实际水位变化幅度较大,控制系统首要问题就是对码头水位信息进行有效采集,之后根据水位信息,对岸电系统滑移小车进行全面控制,坚决避免电缆接头进入水中,引发一系列安全事故。针对于该类问题,相关设计工作者们建立了大水位差码头船用岸电控制系统,具体结构如图1所示。
在岸电系统设计过程中,主要应用的是PLC作为主控系统,操作人员可以通过控制面板,实现对系统的控制操作。除此之外,在水位传感器应用过程中,能够做到对实时水位信息的有效采集,借助于信号调理电路的方式,将水位信息传输给PLC。此时,PLC可以自动生成实施水位信息,利用显示器将其显示出来,帮助操作人员对水位状态信息进行了解。对于旋转编码器,主要安装在电缆卷筒上,能够将滑移小车中的位移数据转化为脉冲,之后将其传输给PLC,此时,PLC对于脉冲能够实时高速计数操作,通过相应计算自动生成滑移小车位置数据,并在控制面板上进行显示。工作人员还要将滑移小车位置信息与水位信息放在一起进行对比,确保其始终处于安装状态之下。
1.2水位监测系统
从实际分析过程中能够看出,本岸电系统主要应用的是电容式传感器来充当水位检测器。另外,电容式水位传感器主要是借助于导电性原理,将实际水位升降过程转变成电容量变化,对水位进行测量。当水位高度H为0时,人们可以明确分布电容的具体数值。反观信号调理电路,实际电容式水位传感器能够将水位变化转变成电信号,但电信号形式和幅值无法对其进行深入性分析。例如,当岸电系统控制器应用的是西门子PLC时,模拟量输入模块中的输入信号,应该以标准量程下的直流电压或者是电流信号为主。所以说,在配合应用集成电路时,能够实现对电容式水位传感器信号调理操作。如果岸电系统水位传感器量程距离集中在0到50m范围内,集成电路可以处理本系统电容型水位传感器微小电容量变化,并转变成与PLC控制系统向适应的标准量程电流,具体范围是4到20mA。
2.大水位差码头船用岸电的PLC控制系统内容
2.1PLC控制系统硬件电路设计
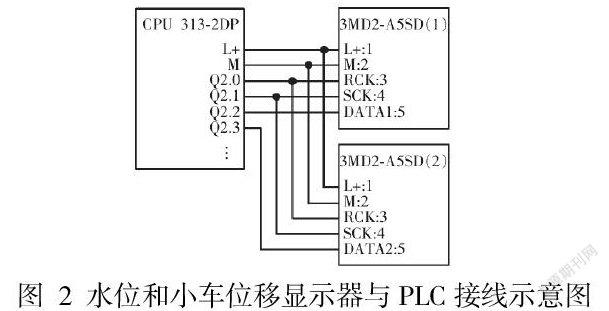
从实际系统控制需求之中能够看出,PLC控制器内部的输入断口数量为11个,输出端口数量为15个。为了维护该系统的有效运行,工作人员需要在其中加入2台显示器,对水位和小车位移进行显示,并增加1个数据输出口,实际显示器与PLC的接线图如图2所示。
在实际操作时,工作人员还要借助于控制面板上的控制按钮,将具体指令输送出去,并对信号指示灯和显示器进行观察,了解系统的实际运行状态。对于控制面板的应用,应尽可能保证布置简洁、灵活,确保系统的控制需求得到充分满足。
2.2PLC控制系统软件程序设计
从岸电控制系统硬件电路设计过程中能够看出,实际系统控制流程主要涉及到4方面内容:第一,系统上电和初始化。当工作人员按下SB按钮之后,系统便会实现上电操作,之后指示灯也会处于亮起状态。所谓初始化,主要指系统每次启动后,均会将系统设置的默认状态转移到PLC之中,这其中包括对工作内存的初始化以及滑移小车复位等等。当关闭系统时,工作人员还要将滑移小车停靠在原点,为后续启动的初始化操作创造有利条件。第二,系统故障检测。在该类故障检测工作执行时,人们需要重点考虑的内容有传感器故障和系统欠压。当系统出现欠压问题时,断路器会自动将主电路切断,此时,辅助驻点也会输出高平信号,让PLC输出口处于高电平状态,此时,继电器相应线圈得电,信号灯亮起。另外,连续检测传感器输出模量大约为10次,此时,工作人员可以通过对其误差计算,看其是否存在故障问题。第三,读取水位和小车位移并将其显示出来。在实际水位传感器应用过程中,主要作用就是对水位信息进行采集,由PLC内置AD模块将模拟量信号转变成数字量信号。第四,滑移小車下降与上升。开始时,工作人员对其高度进行手动调节,由PLC程序确认小车与水面之间的距离,大约在1m左右,之后再进行后续操作。
3.结论
综上所述,实际岸电系统环境效益主要是将码头空气质量作为研究对象,当出现船舶靠港情况时,会涉及到辅机发电装置,此时,容易产生对码头环境产生危害的物质。为了方便分析,人们可以将PLC控制等关键技术应用其中,建立完善的大水位差码头岸电控制系统,让更多问题得到妥善解决。
参考文献
[1]李新生.大水位差浮码头多层平台的竖向研究分析[J].中国水运,2020(06):63-64.
[2]王磊.大水位差直立码头桩基结构设计与优化[J].内江科技,2019,40(12):71-72+86.
[3]刘小强,罗健.大水位差山区河流斜坡客运码头的梳式布置[J].水运工程,2019(02):61-66+127.
