非均布13点激光路面车辙检测偏移误差分析
2020-09-07胡斯然周博闻
胡斯然,周博闻,惠 冰
(1.湖南省交通科学研究院有限公司,湖南 长沙 410015; 2.湖南省交通规划勘察设计院有限公司,湖南 长沙 410008; 3.长安大学 公路学院,陕西 西安 710064)
准确的车辙严重程度评价是路面养护时机与措施选择的重要依据[1-7]。目前,非均布13点激光检测车普遍应用于中国国省干线车辙的快速检测[8-9],受道路线形和驾驶员人为因素的影响,检测车在检测过程中将不可避免的出现横向偏移[10-17],引发激光检测设备的测点偏离正常位置(如图1所示),难以采集完整的车辙横断面形态,进而造成车辙深度偏移误差的产生,甚至导致车辙严重等级的误判,影响结果评价的可靠度[17],进而影响养护时机与措施的科学决策[18-21]。
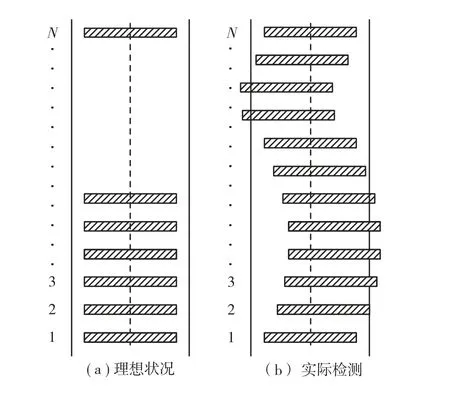
图1 检测车横向偏移图示[7]Figure 1 Illustration of vehicle lateral offset
为掌握多点激光检测设备横向偏移对车辙深度测量的影响,SIMPSON[22-23]等研究表明3点和5点激光检测车行驶过程中会在左、右两侧随机产生50~250 mm的横向偏移,激光点数量越多偏移误差越小;BENNETT[24]对比了30点激光检测设备右偏移50、100、150 mm的车辙深度,表明偏移误差受车辙几何形状的影响,存在高估与低估2种情况。MALLELA[25]提出多点激光检测车横向偏移距离实际可达500 mm;马荣贵[26]基于正弦函数模拟的对称W型车辙,分析了横向偏移对等间距di激光传感器量测的车辙深度检测结果的影响,表明偏移距离为di/2时偏移误差最大;Tsai[27]对比了3点、5点激光和三维线激光的车辙深度检测结果,认为多点激光检测设备的测点间距较大,发生横向偏移后难以获取车辙高程极值点,进而造成检测车辙深度的低估。上述研究表明,检测车横向偏移将影响车辙深度测量的精度。但研究局限于模拟或单一实测的车辙横断面,并未考虑不同的车辙横断面形态;另外检测车偏移距离设置偏小,无法涵盖实际的偏移范围。
本文采用非均布13点激光车辙检测设备现场实测的数据,针对有隆起和无隆起2类典型车辙形态,研究了左、右2个偏移方向和3个偏移距离(100、300、500 mm)对车辙深度测量结果的影响,分析了偏移误差的变化规律与原因及对车辙严重等级判定的影响。为车辙深度测量数据质量的评估和偏移误差的修正提供依据。
1 检测设备与方法
1.1 车辙检测设备与深度计算方法
非均布13点激光车辙检测设备广泛应用于中国国省干线车辙的快速检测,设备基于离散点的相对高度测量原理,布置了13个距路面300 mm的激光传感器,其中9个垂直激光传感器按照中间稀疏两侧密集的规律分布在检测断面上,4个倾斜激光传感器布置在垂直激光传感器的两侧以实现3 500 mm的最大检测宽度,激光器布设如图2所示。
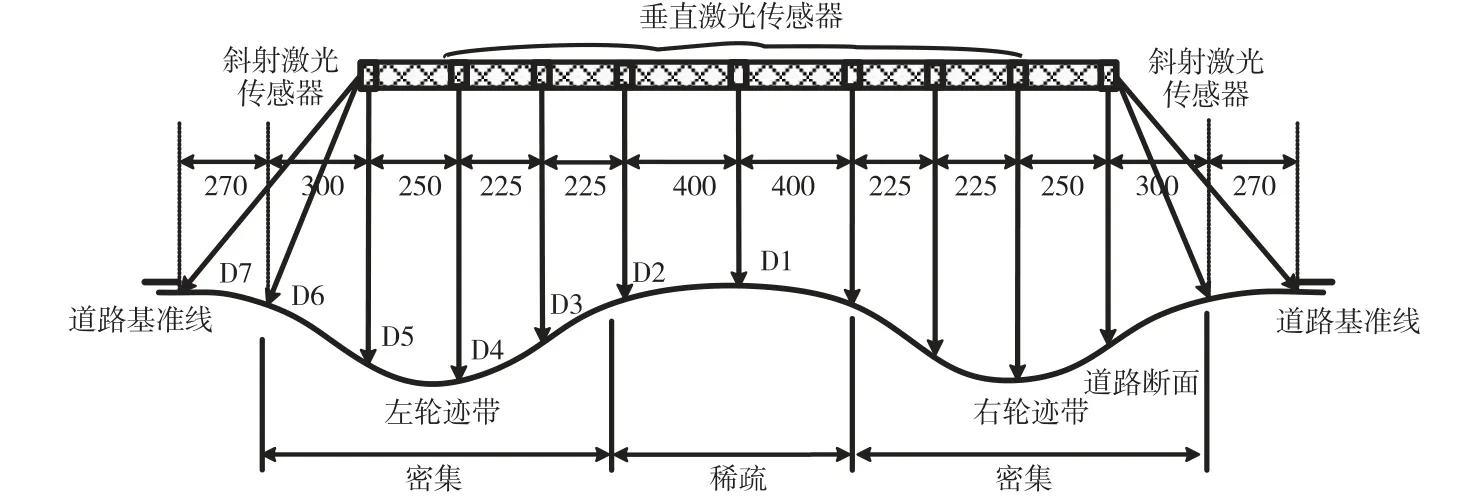
图2 非均布13点激光传感器的布设示意图 (单位:mm)Figure 2 Layout of non-uniformly distributed 13-point laser sensors(Unit:mm)
非均布13点激光检测车所采集的车辙横断面相对高程原始数据见表1,第1行G代表国道,108表示道路编号;A代表上行线 (B代表下行线),1235代表检测点的桩号,112和082分别代表左、右辙槽的车辙深度,单位为0.1 mm;第2行为激光传感器距路面各点的相对高程,单位为0.1 mm;第3行为激光测点在检测断面上的横向坐标,单位为1 mm。
车辙深度计算时需将检测断面中13个测点的横向分布坐标 (表1中第3行)及其量测的相对高程数据 (表1中第2行)还原成近似连续的车辙形态,再按照 《公路路基路面现场测试规程》(JTG E60-2008)[28]中 “T 0973-3”规定的包络线法计算得出两侧轮迹处横断面包络线与道路表面间的最大垂直距离,即为车辙深度,见图3。

表1 车辙横断面数据Table 1 Raw data of 13-point based laser bar tested
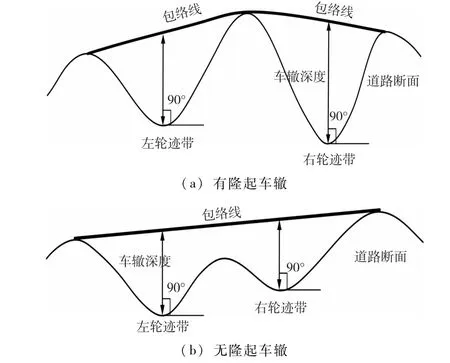
图3 包络线法测量车辙的原理Figure 3 Illustration of the wire line method
1.2 数据选择与偏移误差计算方法
本文采用2015年G108现场的共110组车辙检测数据,通过车辙横断面形态分析选择了典型的无隆起车辙52组数据,有隆起车辙58组数据,车辙深度计算分别采用图3(a)和 (b)方法;未偏移时2类车辙形态及深度计算实例如图4所示。
本文基于MATLAB软件开发了车辙横向偏移误差计算程序,首先利用未偏移的13个激光点横向坐标和相对高程建立近似连续车辙横断面,并计算偏移前的车辙深度D;其次,分别采用不同偏移距离和方向的非均布13点激光现场检测数据,构建偏移后的车辙横断面形态并计算车辙最大深度D;偏移前后车辙深度的绝对误差即为偏移误差。无隆起车辙分别向左、右两侧偏移距离d=100、300、500 mm时,前后的横断面对比结果如图5所示,图5中虚线表示偏移前车辙,实线则表示偏移后车辙。
从图5可以看出,随着检测车横向偏移距离的增大,非均布13点激光难以获取完整的辙槽形状,导致在此基础上计算的车辙深度偏移误差产生;受最深辙槽位置、辙槽宽度和槽壁坡度等辙槽形态特征影响,虽然不同偏移方向的车辙形态存在一定差异,但偏移变化规律具有较高的一致性。
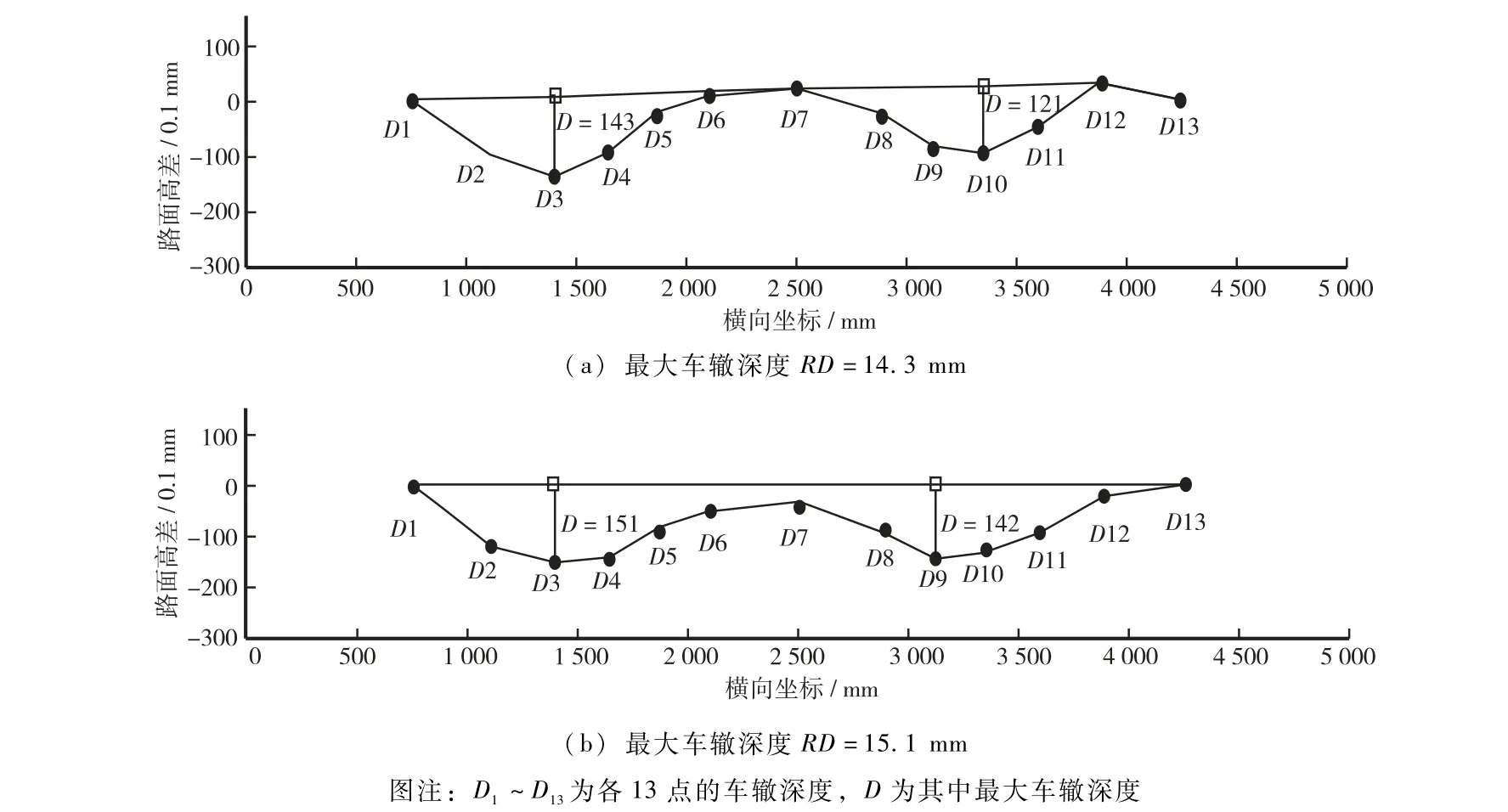
图4 2类车辙形态及深度计算实例Figure 4 Two types of rutting patterns and depth calculation examples
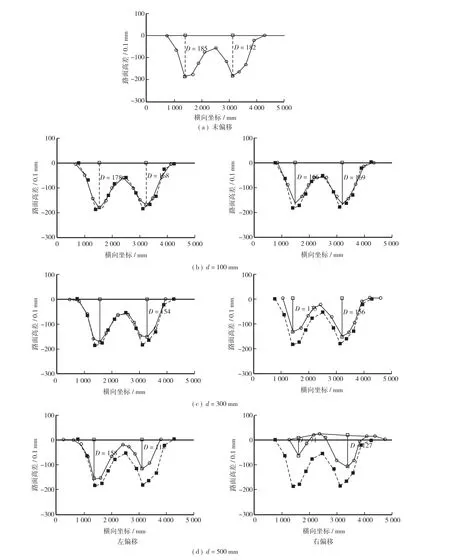
图5 偏移前后车辙横断面对比图Figure 5 Simulated results of different offset magnitude
2 检测结果与分析
2.1 车辙深度检测结果
2.1.1 无隆起车辙
将52组无隆起车辙的左偏移数据按深度由小到大排列,对比偏移100、300、500 mm前后车辙深度测量结果,如图6所示。
从图6可知,当检测车辆横向偏移时,无隆起车辙的深度检测结果随偏移距离增加而不断减小,偏移距离分别为100、300、500 mm时,最大偏移误差分别为2.4、4.4、6.6 mm。无隆起车辙检测偏移误差的产生将导致车辙严重等级被低估。
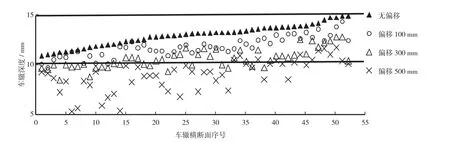
图6 无隆起车辙偏移前后深度检测结果Figure 6 None upheaval rut depth detection results before and after lateral offset
2.1.2 有隆起车辙
有隆起车辙58组数据左偏移前后的车辙深度测量结果如图7所示。
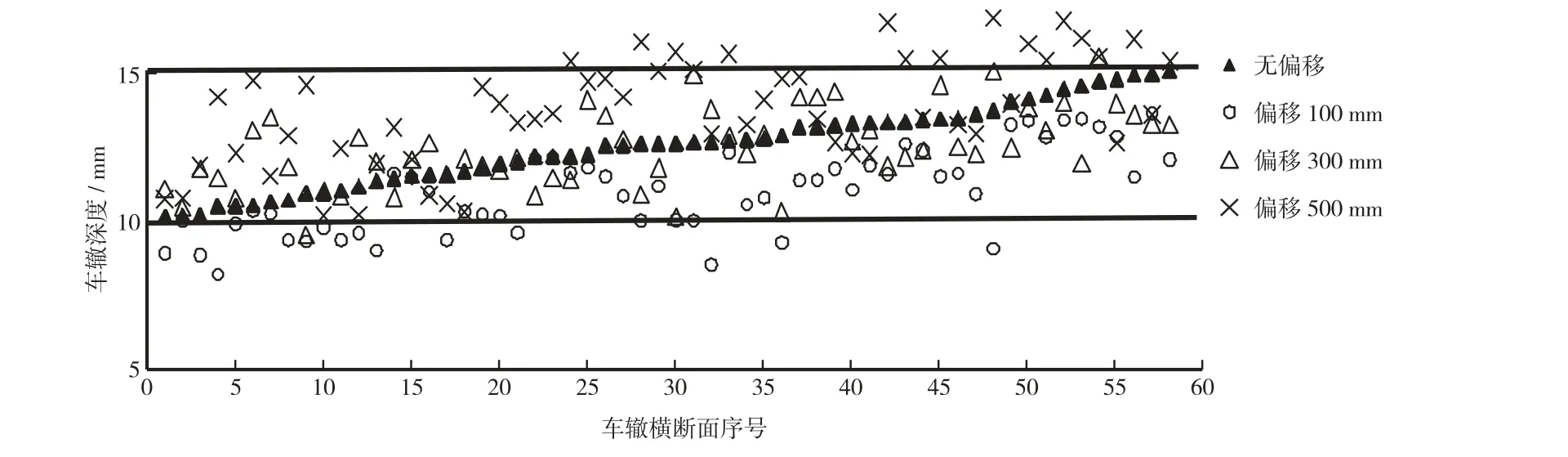
图7 有隆起车辙偏移前后深度检测结果Figure 7 Upheaval rut depth detection results before and after lateral offset
从图7可以看出,有隆起车辙随着偏移距离增大,深度检测结果先减小后增大。当检测车横向偏移100 mm时,49组车辙横断面测量深度不同程度减小,最大偏移误差为-4.6 mm;偏移距离为300 mm时,31组数据的车辙测量深度减小,27组数据的车辙测量深度增大,最大偏移误差为2.8 mm;当偏移距离达到500 mm时,40组断面的车辙深度测量结果高估,最大偏移误差为4.1 mm。有隆起车辙检测偏移误差的产生会导致车辙严重等级的高估或低估。
2.2 车辙严重等级判定
目前中国 《公路技术状况评价标准》 (JTG H20-2007)[3]以10、15 mm为轻、重度车辙严重等级判定阈值,准确的车辙严重等级评价是进行预防性养护时机与措施选择的重要依据[29]。上述可知,检测车横向偏移会产生车辙深度检测偏移误差,进而造成车辙深度检测结果被高估或低估,可能导致车辙严重等级的误判,影响车辙严重程度的准确评价。
为分析偏移误差对车辙严重等级评价准确性的影响,针对有、无隆起车辙形态的左、右2个偏移方向和3个偏移距离 (100、300、500 mm)对车辙严重等级评定的影响,将车辙严重等级未产生改变的视为正常,分别计算了等级正常、低估和高估3种情况比例。无隆起和有隆起车辙严重等级判定结果如图8和图9所示。
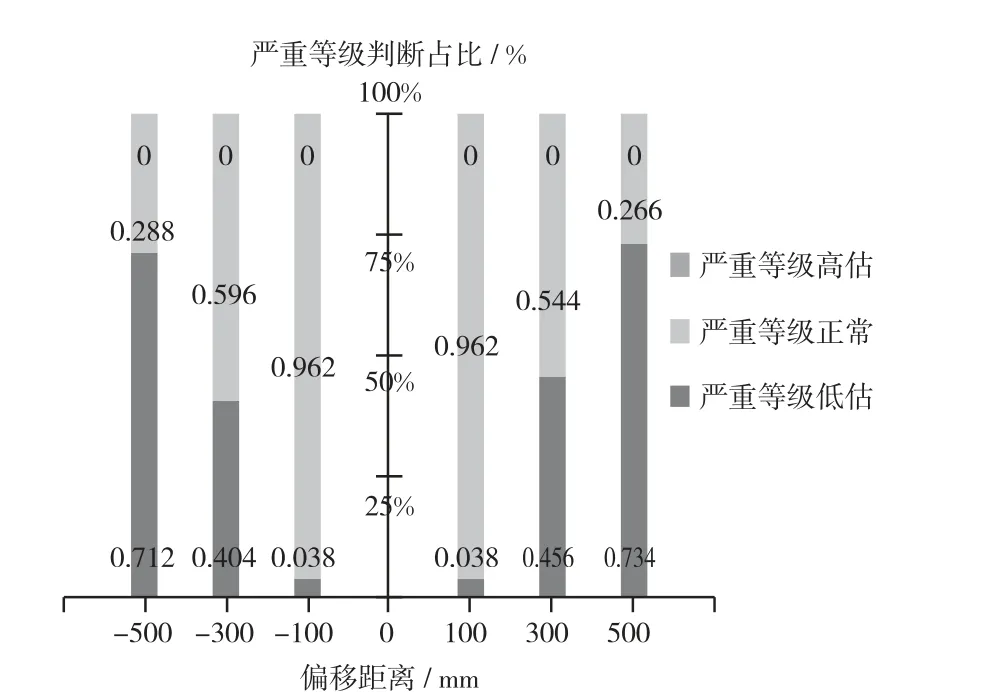
图8 横向偏移对无隆起车辙严重等级判定影响Figure 8 Influence of lateral offset on judgment of none upheaval rut severity level
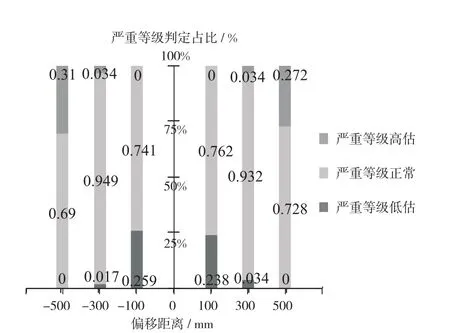
图9横向偏移对有隆起车辙严重等级判定影响Figure 9 Influence of lateral offset on judgment of upheaval rut severity level
从图8可以看出,检测车横向偏移会导致无隆起车辙形态严重等级被低估,随着偏移距离不断增大,低估比例逐渐增加;当偏移距离为100 mm时,现场检测数据中最多有3.8%的车辙严重等级被低估;当偏移距离为300 mm时,最多有59.6%被低估;当偏移距离达到500 mm,最多有73.4%被低估。严重等级被低估的车辙可能会导致最佳养护时机的错失,甚至影响车辆行驶安全性。
从图9可以看出,有隆起车辙随着偏移距离的不断增大,严重等级判定呈现先低估后高估的趋势;当偏移距离为100 mm时,最多有25.9%的车辙严重等级被低估;当偏移距离为300 mm时,最多有94.9%的车辙严重等级正常;当偏移距离为500 mm时,有隆起车辙最多有31.0%的严重等级被高估,可能导致养护周期缩短,造成养护资源浪费。
2.3 偏移误差原因分析
通过上述分析,检测车横向偏移对有、无隆起车辙的严重等级判定准确性存在显著影响。图10为无隆起车辙偏移误差示意图。当检测车向一侧偏移时,另一测的边缘激光传感器测点将沿辙槽坡壁明显下滑,13点激光测量将无法获取车辙完整横断面形态。偏移后包络线的变化,导致车辙深度结果减小,引起严重等级被低估。
图11为有隆起车辙偏移误差示意图,车辙的隆起高于道路平面。因此,采用包络线法分别计算左右辙槽深度时,非均布13点激光检测设备受检测宽度限制,无法获取车辙边缘隆起最高点。而偏移后包络线的变化,使得车辙深度结果增大,引起严重等级的高估。另外,有隆起车辙在小于300 mm的低估则是由于车辙中部隆起高度较两侧隆起大,稀疏分布的激光传感器测点在偏移产生时无法获取中部隆起最高点,同时边缘测点高程增长较小,造成车辙深度结果降低,引起车辙严重等级的低估。
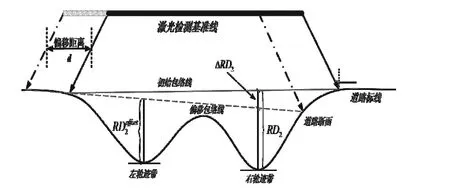
图10 无隆起车辙偏移误差示意图Figure 10 The effect of none upheaval rut characteristics to lateral offset
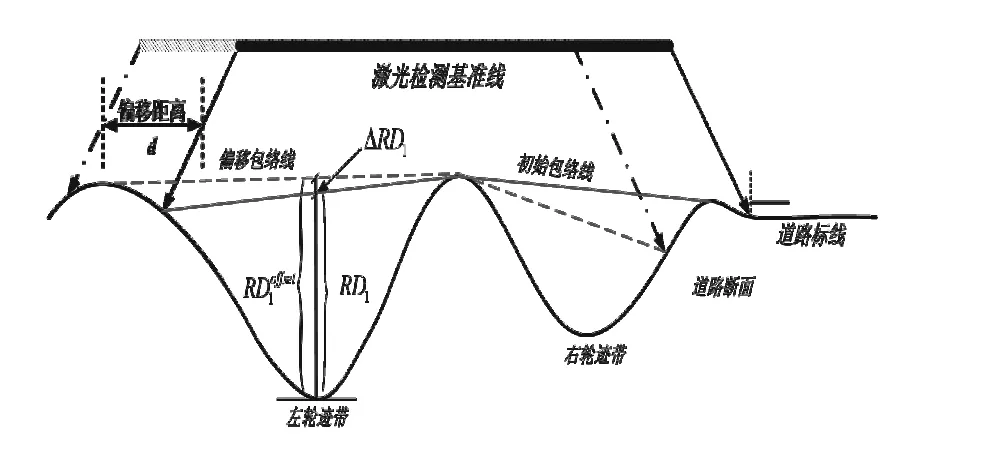
图11 有隆起车辙偏移误差示意图Figure 11 The effect of upheaval rut characteristics to lateral offset
3 结论
a.无隆起车辙深度检测结果随偏移距离增加而不断减小,有隆起车辙先减小后增大。检测车横向偏移会造成车辙偏移误差产生,当偏移距离分别为100、300、500 mm时,无隆起车辙的最大偏移误差为-2.4、-4.4、-6.6 mm,有隆起车辙的最大偏移误差为-4.6、2.8、4.1 mm。
b.偏移误差会导致车辙严重等级误判,无隆起车辙严重等级被低估,随着偏移距离不断增大,严重等级被低估比例由3.8%增加至73.4%,车辙严重等级被低估可能会导致最佳养护时机的错失,甚至影响车辆行驶安全性;有隆起车辙不同偏移距离时,分别存在高估和低估现象,最多有31.0%的车辙被高估,可能导致养护周期缩短,造成养护资源浪费。
c.无隆起车辙偏移误差受最深辙槽位置和槽壁坡度影响;有隆起车辙分别受13点激光检测设备受有效检测宽度限制和激光器布设间距影响,导致偏移误差产生。结论为车辙深度检测数据质量评估与偏移误差修正提供参考。