基于创新设计理念的变胞机构应用研究
2020-09-04林瑾,郁敏
林 瑾,郁 敏
(无锡商业职业技术学院,江苏 无锡 214153)
创新设计是创新构思与设计实践相结合的一种活动,创新是设计的灵魂,同时也对设计提出了本质要求。创新表现在人类社会历史发展的每个阶段,从某种意义上可以说,科技创新是现代化机械工业的“心脏”。习近平在国家科学技术奖励大会上指出:“我国科技发展的方向就是创新、创新、再创新。”机械产品创新是科技创新的一个分支,如何可靠、有效完成机械产品优化设计和创新设计,满足产品安全性的可靠、经济效益最佳、生态零污染等基本原则,是产品研发人员奋斗的目标。
一、产品创新
当下我国正加速进入信息化时代,科技发展日新月异,产品设计者拥有更多的机遇,但最终能否设计出优秀作品并成功推向市场,还需要把控机械产品设计的每个环节,尤其是机械结构设计环节。这是一项比较复杂、系统的工作,因为在结构设计中很多关键技术要素决定着机械机构设计水平[1]。
机械产品设计是机械工程的重要组成部分,设计质量决定了机器的质量,机械产品设计过程如图1所示。
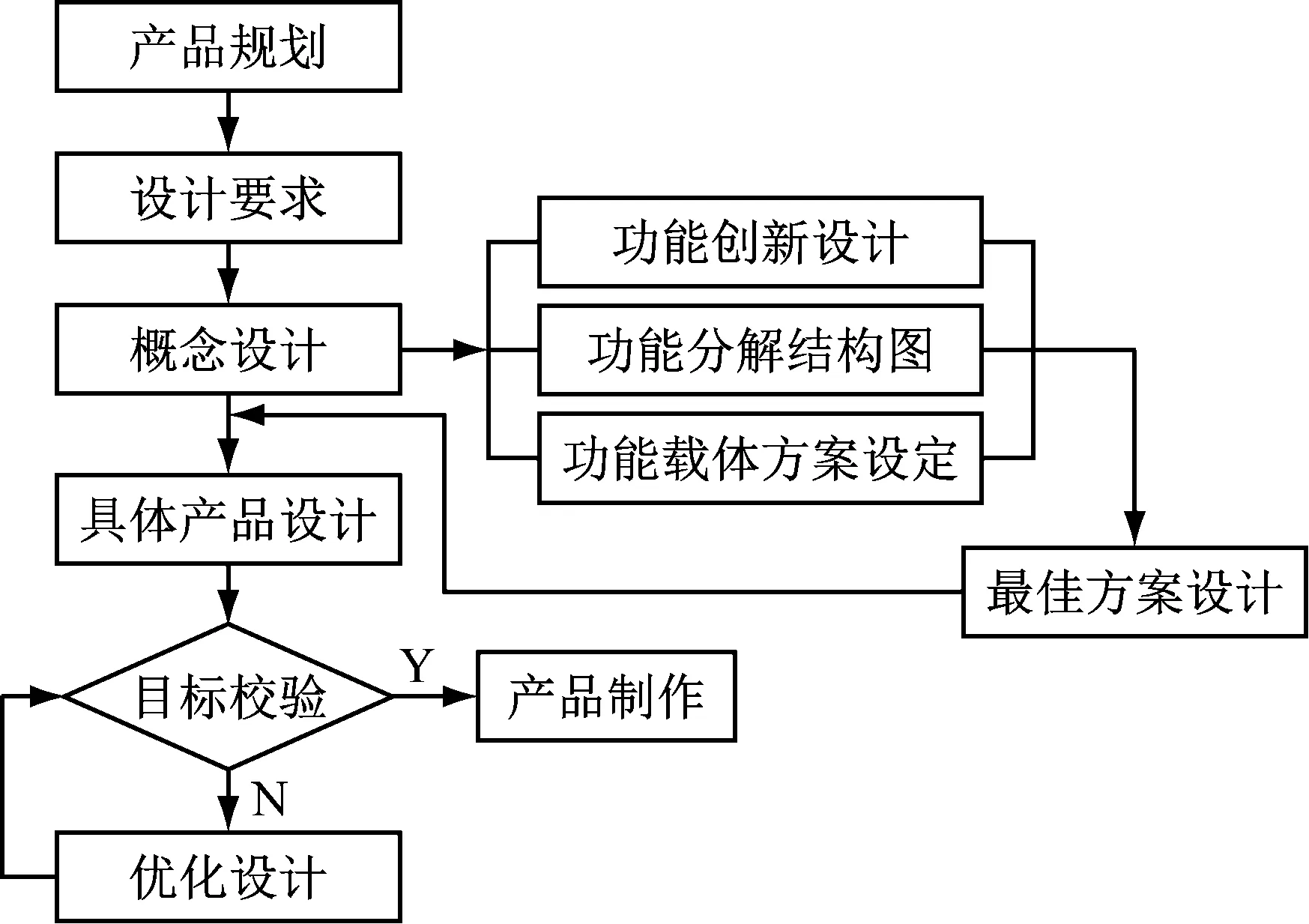
图1 机械产品设计流程图
机械产品设计流程的第三个环节是概念设计,也就是进行各类机构的创新设计,这是产品设计流程中非常重要的一个环节。概念设计将设计理念作为主线贯穿整个设计过程,它包含功能创新设计、功能分解结构图和功能载体方案设定三个模块,是设计者创造性思维的体现。概念设计是我国制造业发展的重要推力,也是我国成为创新型国家的主要途径。
概念设计需要设计者在掌握机械结构和设计方法的基础上,具有创新思维能力。创新思维是概念设计的源泉,要形成这种高层次的思维,必然经历三个典型阶段。首先是储蓄阶段。储蓄需要解决的问题,围绕问题收集信息,信息量越大,脑细胞及神经网络中留下的印记越多。其次是探索阶段。对收集的信息进行探索,取其精华去其糟粕,多次尝试解决。最后是顿悟阶段。人脑在某些特定情境下,会突显新的形象和思想,从而使得问题最终得以解决。
探索阶段是概念设计的中间环节,这是一个反复迂回的过程,也是最为关键的阶段,是最初储蓄阶段的继承环节,是最后顿悟阶段的孕育环节。在这个阶段中,设计者常常会遇到思维瓶颈,能否快速有效地发散思维,决定了能否成功到达顿悟阶段,最终产生有效创新设计方案。
二、变胞方式
起源于礼品纸盒包装的变胞机构,是机构学领域的研究热点,它的提出给传统机构学带来了生机与活力,改变了传统机构学概念和设计方法[2]。变胞机构可实现自我重构,瞬间使得部分构件合并、分离或者奇异,具有变拓扑结构、变构件数、变自由度的特点。相较于传统机构,变胞机构效率高,适应性强,机构精简,节约成本。
近年来,因特殊的变胞方式,变胞机构越来越多地用于新型创新机构的研发中。变胞思维的合理应用,将有效突破设计者在创新思维中的瓶颈问题,大大缩短机械创新设计的探索进程。
机构常见的变胞方式可以通过几何约束、力约束或者磁力约束来完成,具体的变胞实现机构如表1所示。

表1 常见变胞方式
(一)刚性变胞方式
变胞实现方式有刚性和柔性两种,其中刚性变胞包括使用挡块、顶针、电磁,或者利用机构死点位置进行变胞等。在进行机械结构设计时,应用这些变胞方式改变机构的拓扑结构,可以达到机构优化和机构创新的目的。
1.挡块约束
挡块约束是几何约束的一种,可以应用于转动副或者移动副。转动副中安装挡块后,转动副只能在一定角度内往复转动,不能实现整周转动。若改变挡块形状,可以控制转动副的运动角度。移动副中安装挡块,移动副的行程受限,挡块位置灵活调整,可以调节移动副的行程,适应机构设计的不同要求。
2.顶针约束
顶针约束也可应用于转动副或者移动副,组成运动副的两个构件,一个含有顶针,另一个有一缺口,运动副转动或移动中,当顶针遇到缺口位置,两个构件锁止。若要两构件相对运动,需要外力达到一定程度,克服锁止力后,方可继续运动。根据锁止力及外力的设置,可以调整机构的运动效果。
3.电磁约束
电磁约束应用在运动副中,可将电磁离合器安装在合适的位置上,利用通电或断电来控制电磁离合器的接合与分离。也可以将电磁铁安装在合适位置上,利用通电或断电控制电磁铁吸附力的存在或消失。通过电磁约束的存在或消失,达到机构变胞的目的。
4.死点位置
死点位置在许多类型的机构中都存在,当从动件上传动角为0度,驱动力对从动件的有效回转力矩为零,机构处于死点位置。机构启动时处于死点位置,无论驱动力多大,都无法驱动从动件运转。可以利用辅助机构,采用手动或电动方式助力,实现由死点位置的再次启动。也可以采取措施,比如安装飞轮、机构错列等,使得机构在运动过程中能顺利通过死点位置,从动件按预期方向运动。利用机构死点位置及辅助机构,可实现机构变换拓扑结构,达到动态变胞的目的。
(二)柔性变胞方式
柔性变胞方式包括使用弹簧,或者直接使用柔性杆等。
1.弹簧力约束
柔性变胞机构的应用比较广泛,比如在构件之间安装弹簧或者卷簧,使得两构件间预先存在相对作用力,两构件间运动副在工作时若受到外力超过预存力,运动副可正常工作,若受到外力小于预存力,两构件相对固结。动态改变外力大小,可实现机构变胞的目的。
2.柔性杆应用
柔性变胞机构还可以直接使用柔性杆,柔性杆可以在一定受力下发生变形,如曲柄摇杆机构中连杆为柔性杆,摇杆运动未受限时,机构为普通曲柄摇杆机构。若摇杆运动受限后,曲柄继续转动,柔性杆就会受力变形,这样就实现了不同的构态。
三、拓扑结构
在对结构进行优化时,拓扑优化是重要的参考依据,其理论研究对变拓扑机构的结构创新设计具有重要的意义和价值[3]。变胞机构与传统机构不同的典型特征就是拓扑结构的变换,因而研究创新变胞机构,主要是研究机构的拓扑结构。在工作态时,变胞机构具有稳定的拓扑结构,在变胞态时,其具有稳态之间的跃迁态拓扑结构[4]。
通常描述机构拓扑结构的方法有矩阵法和拓扑图法。
(一)拓扑图法
拓扑图是表示机械结构的方式之一,如图2的五杆变胞机构,目前构态中1、2构件固结,视为一体,其拓扑图如图3所示。用圆圈代表机构中的四个构件,用线段代表机构中的四个运动副。当构件4转动后碰到右侧固定物,运动受限,若此时构件1继续转动,构件2会克服弹簧力,相对构件1发生运动,此时将会产生新的拓扑图形。
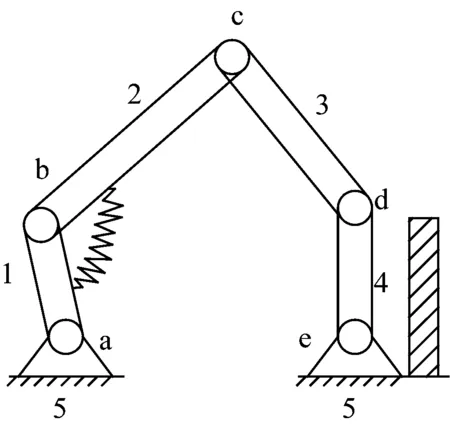
图2 五杆变胞机构
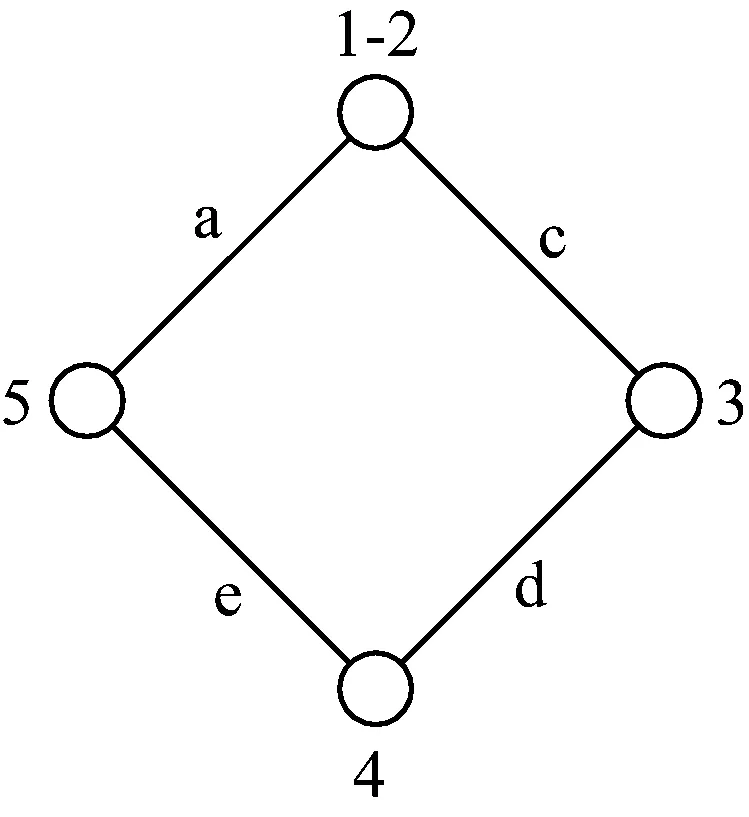
图3 五杆变胞机构拓扑图
用图形表示机械结构的方式直观、明确、便于观察,缺点是利用图形进行计算比较复杂。
(二)矩阵法
描述变胞机构多种构态还可以用矩阵法。矩阵法常用的有邻接矩阵、并联矩阵和全息矩阵,每种矩阵各有特点,表达重心不同。
1.邻接矩阵
邻接矩阵表示构件数量、运动副数量及运动链关节间的连接关系,图2五杆变胞机构目前构态的邻接矩阵如式(1)所示。矩阵四行四列,可看出运动副有四个,运动链关节间有连接关系的用数字“1”表示,不存在连接的用数字“0”表示,可看出构件也是四个。
acde
(1)
2.关联矩阵
关联矩阵除了表示构件、运动副数量之外,侧重描述构件与运动副之间的关系,图2五杆变胞机构目前构态的关联矩阵如式(2)所示。用关联矩阵来描述拓扑结构变化过程, 将矩阵中的行代表构件,列代表运动副,在运算过程中,对没有发生变化的构件和运动副不需要重新编号, 确保设计过程中编号的可传递性[5]。相比较邻接矩阵,关联矩阵表达构件数目及连接关系更为直观。
acde
(2)
3.全息矩阵
全息矩阵表示的信息量较多,它包含必要的构件信息、运动副数量及编号,可以表示运动副的类型、构件和运动副之间的关系,全息矩阵的数据还可以清晰标注所有构件的几何尺寸。图2五杆变胞机构目前构态的全息矩阵如式(3)所示,可以看出全息矩阵分为右上、左下两个斜三角形。右上三角形中的非“0”数据表示各个构件的长度,数字“0”表示运动链关节间不存在连接关系。左下三角形中的非“0”数据表示构件的具体编号,若运动链关节之间不存在连接关系,则用数字“0”表示。
(3)
邻接矩阵和关联矩阵描述变胞机构方法简单,表示清晰,进行数据运算也比较容易,但不能全面表示拓扑结构、运动副属性以及构件属性。全息矩阵描述较完整,但其表示相对复杂,运算过程也比较烦琐。在使用矩阵描述变胞机构时,若机构中的运动副种类相对单一,侧重研究运动副拓扑变化规律,可优先选用关联矩阵进行构态描述。若机构中运动副种类较多,同时需要分析研究构件的结构尺寸,可优先选用全息矩阵进行构态描述。在机构的设计中,若能选用合适的矩阵描述机构的构态,可为新型机构的设计、验证及运动轨迹预测提供有力的数据参数支持。
四、结论
现代机械制造领域工作环境和任务要求通常具有多变性,变胞机构相较于传统机构更能适应现代化需求。将变胞机构应用于机械创新设计的探索阶段,充分发挥变胞机构拓扑结构变化的特点,构造出满足多工位构型要求的机构,易于设计者打开多维度创新思路,到达创新设计的顿悟阶段,推动新型机构的研发。
变胞机构创新设计中,可通过拓扑图、矩阵、计算机软件等方法进行辅助设计。相较于拓扑图的描述方法,利用矩阵描述变胞机构的相关参数,更便于下一步的计算机数据验算。变胞机构重构后,矩阵相应发生变化,通过公式运算推导出跃迁态拓扑结构,为变胞机构的创新设计提供数据支持。