正实特征值切换拓扑的一般线性多智能体动态系统稳定性
2020-09-03李升波王志涛郑洋杨殿阁游科友
李升波*,王志涛,郑洋,杨殿阁,游科友
1. 引言
近年来,由于理论突破和工程应用,多智能体系统协同控制受到诸多研究关注。协同控制的主要研究问题包括趋同控制[1]、交会控制[2]、群集控制和队列控制[3]。由于其高效性和可靠性,协同控制得到了广泛应用,如车辆队列、多无人机(unmanned aerial vehicle,UAV)队列、协同装配系统[4]和传感器网络[5,6]等领域。
一个核心问题是当每个智能体仅利用邻域智能体的局部信息时,如何设计分布式控制律以保持多智能体系统稳定性及一致性[7]。拉普拉斯图在描述交互拓扑结构和分析多智能体系统的稳定性方面起着重要作用[8,9]。Olfati-Saber等[10,11]将多智能体系统的每个智能体建模为单积分器,提出了利用拉普拉斯图证明稳定性的理论框架。通过将该框架扩展到双积分器系统,Ren等[12,13]从图论的角度给出了多智能体系统稳定性的充要条件,利用约当标准型变换来分析闭环矩阵。对于高阶动力学,Ni和Cheng [14]设计了一种基于黎卡提和李雅普诺夫不等式的稳定性算法。Zheng等[15]利用矩阵分解和赫尔维茨判据证明了具有正实特征值矩阵拓扑结构多智能体系统的稳定性。Hong等[16]通过扩展拉塞尔的不变性原则,严格证明多智能体系统的稳定性。除上述控制律外,Zheng等[17]设计了一种针对多智能体非线性系统的分布式模型预测控制器,并构造了李雅普诺夫函数来证明网联车辆队列的渐近稳定性。Wu等[18]提出了一种具有正定拓扑结构多智能体系统的分布式滑模控制器,利用了基于李雅普诺夫理论的渐近稳定性。Barooah等[19]提出了一种基于微扰的控制方法,以提高车辆队列的稳定裕度。Ploeg等[20]开发了一个H-无穷控制来实现多智能体系统的队列稳定。
由于网络中的连接失效/创建或交互智能体间通信的阻塞,交互拓扑结构的变化十分常见。诸多研究者对切换拓扑结构下多智能体系统稳定性进行了研究。例如,Tanner等[21]提出了一种结合吸引力和对准力的控制方法,可以在动态拓扑结构下使群集系统达到稳定。Olfatil-Saber等[10]提出了共同李雅普诺夫函数,该方程可基于矩阵论和代数图论确保单积分器线性系统的稳定性。Ren [12]考虑了一个具有双积分器运动学的多智能体系统,通过证明李雅普诺夫函数的局部李普希兹连续性,表明一组连通的、无向或有向拓扑结构的切换系统的稳定性。Ni等[14]将这项研究扩展到高阶积分器动态系统,并利用柯西收敛准则讨论了在联合连接的无向图下的稳定性。理论上,有向图的稳定性分析比无向图的稳定性分析更具挑战性[10]。由于有向拓扑结构缺少正定性保证,无向拓扑结构方法不能直接应用于有向拓扑结构问题。同时,有向切换拓扑结构的共同李雅普诺夫函数设计更为困难。一些开创性的研究聚焦在具有特殊有向切换拓扑结构的多智能体系统的稳定性分析上。例如,Qin等[22]分析了切换有向拓扑结构系统的李雅普诺夫函数,证明了在平衡有向图下可以实现系统稳定性。Dong等[23]探索了时变队列参考函数的显式表达式,并表明若停留时间大于正阈值可保持系统稳定性。
本文研究了在一种有向切换拓扑结构下的一般线性多智能体动态系统的稳定性和指数收敛速度。通过结合约当标准型和共同李雅普诺夫函数的变换,提出了切换拓扑多智能体系统稳定性的充分条件。本文的贡献包含两个方面。首先,参考文献[10,12]中将高阶动态系统的拉普拉斯矩阵与智能体数目相结合,以处理单积分器和双积分器动力学系统,这导致用于单积分器和双积分器系统的分析方法不适用于一般的线性动力学系统。相比之下,本文考虑了特征值为正实数的有向拓扑结构的稳定性,研究结果适用于具有一般线性动态子系统的多智能体系统。其次,与参考文献[14]中的无向拓扑结构相比,有向拓扑结构下由于其不对称性,正定性更难分析。与参考文献[22]中讨论的平衡有向拓扑结构相反,由于矩阵(L+ LT)/2并不总是正定的,参考文献[22]中的结果不能应用于本文中具有正实特征值的有向拓扑结构。本文提出的方法适用于正实特征值拓扑结构。本文的拓扑结构与平衡有向拓扑结构的关系如图1所示。
本文结构如下:第2节介绍了代数图论;第3节介绍了一种正实特征值拓扑结构,并基于共同李雅普诺夫函数和黎卡提不等式设计线性控制器;第4节证明了闭环系统在切换拓扑结构下的稳定性和收敛速度;第5节利用数值仿真证明该方法的有效性;第6节对全文进行总结。
2. 问题描述
本文考虑了一个由一个领导者和N个跟随者组成的多智能体系统。每个智能体的动力学是同质且线性的。本文假设描述交互拓扑结构的矩阵(L +P)的所有特征值都是正实数。
2.1. 通信图拓扑结构
智能体之间的信息流是由N个节点V ={a1, a2, … ,aN}和边Ɛ≤ V× V组成的有向图拓扑结构G (V, Ɛ)描述的。节点ai表示第i个智能体,每条边表示两个智能体之间的有向信息流。
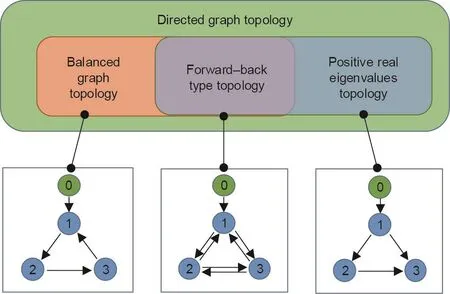
图1. 对上述拓扑结构间关系的描述。正实特征值拓扑结构具有矩阵(L+P)的所有特征值均为正实数的特性。前向-后向拓扑结构中的跟随者可以从同等数量的前向、后向智能体接收信息。很明显,前向-后向类型的拓扑结构既是一种平衡图,也是正实特征值拓扑结构。
邻接矩阵定义为:E=[eij]∈RN×N,其中,如果(aj, ai)∈Ɛ,则eij>1,否则eij=0,R表示实数域。(aj,ai)∈Ɛ表示智能体j可以从智能体i中获取信息。不允许有自边界(aj, ai),即eii=0。节点ai的邻集表示为Ni={aj∶(aj,ai)∈Ɛ}。定义拉普拉斯矩阵为L = [lij] ∈RN×N,其为了表示领导者和跟随者之间的信息流,定义了一个固定矩阵P,P = diag{p1, p2, … , pN},其中,若智能体可以从领导者那里获得信息,则pi=1;否则pi=0。基于固定矩阵P,若pi=1,将领航者可达集定义为Pi={0};否则Pi= ∅。然后,定义一个信息可达集Ii= Ni∪Pi以表示智能体i可以从中获取信息的节点。
从ai到aj的有向路径是形为(ai, ai1), ... , (aiƐ, aj)的有向图中的一条边界序列,其中每一条边界(ap, aq)∈Ɛ。有向生成树是一个有向图,除了根节点外,每个节点都只有一个父节点。图(V, Ɛ)的有向生成树(Vs, Ɛs)是(V, Ɛ)的子图,因此(Vs, Ɛs)是有向树且Vs= V。
2.2. 智能体动力学
每个智能体的动力学为:

式中,xi(t)∈Rn为状态向量;ui(t)∈Rm为控制输入量;n和m分别为状态量和控制量的维数;A∈Rn×n和B∈Rn×m分别为系统矩阵和输入矩阵。通过选择合适的值对(A, B),系统可认为是稳定的。
领导者具有以下线性动力学:

式中,x0∈Rn是领导者的状态向量。
2.3. 多智能体系统的稳定性
多智能体协同控制的目标是使各跟随智能体的状态与领导者一致。对于每个智能体i∈{1, ... , N},都需要一个分布式控制器ui(t)来实现。

为便于后续稳定性分析,定义新的跟踪误差如下:

跟踪误差的状态空间函数为:

3. 控制器设计
多智能体系统的互联拓扑结构会因智能体之间的通信故障或阻塞而时变。在切换拓扑结构问题中,每个智能体的信息可达集是时变的。(L+P)σ用于表示交互拓扑结构矩阵随时间的变化,其中σ: [0,∞) →∑是t时刻的开关信号,∑是包含所有拓扑结构的一组图的索引集。考虑一个非空时间间隔的无限序列[tk, tk+1), k = 0, 1, ... ,其中,t0=0, tk+1– tk≤Tc,Tc为常数。假设σ在每个间隔内为常数,图可以表示为Gσ。为确保多种拓扑结构下的稳定性,本节设计了合适的控制器和图集{G∑}。
3.1. 线性控制律
对于每个智能体,控制器是分布式的,只能使用其信息可达集Ii中的信息。采用以下控制律[24]:

式中,K∈Rm×n为线性反馈增益。将式(6)代入式(5)可以得到如下所示的智能体i的闭环动态:

为描述多智能体系统的动力学,定义系统的集体状态量如下:

回顾拉普拉斯矩阵L和固定矩阵P的定义;领导者-跟随者多智能体系统的闭环动力学为:

式中,IN为单位矩阵;符号 为克罗内克积。闭环系统整体矩阵定义如下:

对于线性系统,其稳定性与闭环系统矩阵的特征值有关。由式(10)可以看出,Ac的特征值取决于(L+P)。换句话说,互联拓扑结构影响多智能体系统的稳定性。在下面的小节中,我们将讨论一种确保(L+P)特征值为正实数的拓扑结构。
3.2. 具有正实特征值的互联拓扑结构
该方法适用于具有正实特征值且缺乏精确一致数学描述的拓扑结构。因此,本文特别关注一类具有正实性的特定类型的拓扑结构。
引理1[15]:设λi,i=1, 2 , ... , N为(L +P)的特征值,若存在根为领导者的有向生成树,且满足以下条件之一,则所有的特征值都是正实数,即λi>0,i=1, 2 , ... ,N:
(1)跟随智能体的互联拓扑结构为前向类型,即Ni={i–hu, ... , i– hl}∩{1, ... , N},其中,hu和hl分别为正向通信范围的上界和下界。
(2)跟随智能体的互联拓扑结构为前向-后向类型,即Ni={i– h, ... , i+h}∩{1, ... , N}/{i},其中,h为通信范围。
(3)跟随智能体的互联拓扑结构为无向类型,即j∈Ni<===>i∈Nj。
注1:对于单积分器或双积分器动力学,有工作证明了有向生成树的切换有向拓扑结构足以使系统稳定;具体工作参阅参考文献[10,12]。
注2:在参考文献[14]中,讨论了连通无向切换拓扑结构的稳定性。本文考虑了有向拓扑结构;对于非连通结构,将在进一步的工作中对其进行研究。
注3:矩阵(L +P)或与L相关的矩阵的正实特征值和正定性对于分析多智能体系统稳定性具有重要作用。在参考文献[22]中,考虑了平衡有向拓扑结构,即对于拉普拉斯矩阵(L + LT)/2为正定矩阵。一个平衡与强连通图可确保(L +P)的谱半径大于0 [13],然而特征值的正实性并不能总是满足。
3.3. 系数矩阵设计
由于(A,B)是可稳定的,故存在P>0为如下Riccati不等式的解:

式中,δ是正数,可影响系统的收敛性[25]。反馈矩阵I构造如下:

式中,α是满足以下条件的缩放因子:

式中,He(Jσ)= Jσ+JσT;Jσ是(L+P)σ的约当标准型, 即Wσ–1(L +P)σWσ= Jσ,其中,Wσ是一个可逆矩阵,而min{λ(He(Jσ))}表示所有切换拓扑结构下的He(Jσ)最小特征值。如果拓扑结构满足引理1,则He(Jσ)为正定矩阵。在介绍定理前,先介绍以下引理。
引理2[12]:考虑矩阵A=[aij]∈Rn×n。A的所有特征值都位于n个圆盘的交集≡G(A)内,其中,C表示复数集,z是一个复数。
引理2是著名的Gershgorin圆盘准则。
引理3[26]:考虑矩阵Q=[qij]∈Rn×n和集合S={i∈如果对于∀i∉S和j∈S,若存在一个非零序列{qii1, qi1i2, ... , qirj},则Q是非奇异的。
定理1:对于引理1中描述的拓扑结构,将(L+P)转化为约当标准型J,则He(J)为正定矩阵。
证明:对于引理1中定义为(2)和(3)的拓扑结构,矩阵(L +P)是实对称的。显然,He(J)是正定的,因为J是对角矩阵。对于引理1中定义为(1)的拓扑结构,(L +P)的特征值大于或等于1。J可表示为如下形式:
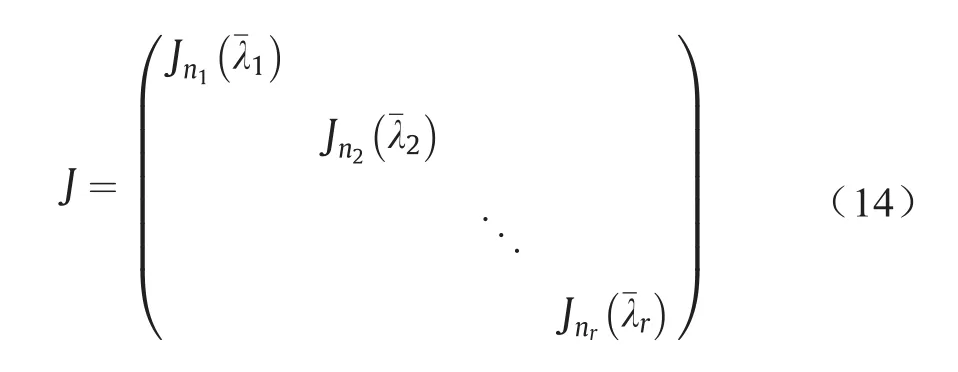
式中,λi是(L +P)的特征值;Jn1(λ1), Jn2(λ2), ... , Jnr(λr)是大小为n1, n2, ... , nr的约当块。于是有
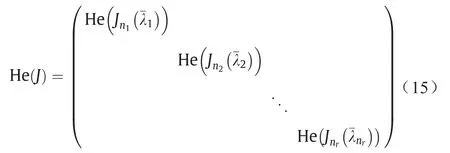
对于每个He(J)块,它有以下形式:
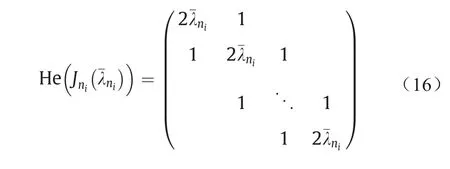
根据Gershgorin圆盘准则,He(J)的所有特征值都不小于零,因为He(J)=[aij]∈Rn×n。根据引理2,可确定He(Jni(λni))是非并且He(Jni(λni))是三阶对角矩阵。如果He(J)是一个准对角矩阵,则He(J)也是非奇异的。故而He(J)的所有特征值都大于零。如果He(J)是对称的,则可证明He(J)是正定矩阵。
表1给出了满足引理1中条件的一些典型拓扑结构的He(J)的最小特征值。在参考文献[15]中描述了这些拓扑结构,其中包括前车跟随式(predecessor following, PF)拓扑结构、前车-领导者跟随式(predecessor-leader following, PLF)拓扑结构、双前车跟随式(two predecessors following, TPF)拓扑结构、双前车-领导者跟随式(two predecessor-leader following, TPLF)拓扑结构、双向跟随式(bidirectional, BD)拓扑结构和双向领导者式(bidirectionalleader, BDL)拓扑结构。
注4:定理1表明,He(J)的最小特征值会影响多智能体系统的稳定裕度。从表1可以看出,随着跟随者N的增加,PF和BD拓扑结构的稳定裕度将变差,而PLF、TPF、TPLF和BDL拓扑结构的稳定裕度则与N的大小无关。来自领导者的信息对于系统的稳定裕度很重要,选择适当的拓扑结构(如PLF和BDL)可以提高系统的稳定裕度。无向拓扑结构BD和BDL的结果与参考文献[27]中所示相同。未来将进行严格的理论分析。
4. 切换拓扑结构下的稳定性
很显然,对于有限切换系统,如果最终拓扑结构能够用第3节提出的控制律来稳定系统,则可以实现稳定性。在无限切换条件下和某类拓扑结构下,系统将通过式(6)中所示的控制律实现稳定。收敛速度也能同时得到保证。
引理4[28]:给定从Rn到Rn的一族函数fσ,其中,Σ是索引集,可以代表一系列系统ẋ=fσ(x),σ∈Σ。如果系列中的所有系统共享相同的Lyapunov函数,那么切换系统ẋ=fσ(x)是全局一致且渐近稳定的。
这个定理将被用来证明我们的主要理论结果。在证明之前,将介绍矩阵论中的一些引理。
引理5:考虑一个正定实矩阵M和一个正实数ξ,ξ<min{λ(M)},其中,λ(M)表示M的特征值。矩阵M–ξI仍为正定。
证明:如果λi是M的特征值,则存在满足Mxi=λixi的特征向量xi。于是有(M–ξI)xi= (λi–ξ)xi。由于0<ξ<min{λ(M)},(M–ξI)的所有特征值都是正的。很显然,(M–ξI)仍然是对称的。因此,M–ξI为正定矩阵。
引理6[16]:考虑一个稳定的线性常数系统ż=Hz,设计其李雅普诺夫方程HTT+TH+νT=0,其中,z是状态向量,H是状态矩阵,ν是正实数,T是这个方程的正定解。该系统的李雅普诺夫函数是V(x)=zTTz,系统的收敛速度V(x)可以用ν来估计,即V(x)<V(x0)e–ν/2(t–t0),其中,t是系统的时间,x0和t0分别是系统初始状态和时间。
本文的主要定理如下。
定理2:考虑一类切换互连拓扑结构{Gσ:σ∈Σ},其中每个拓扑结构的矩阵(L +P)的所有特征值都是正实数。对于任何Gσ,利用等式(12)和不等式(13)设计控制参数。切换系统全局一致渐近稳定,具有共同李雅普诺夫函数V(X)=XTξIPX。其收敛速度满足V(X)<V(X0)e–2δ(t–t0),其中∈RnN×1,N是跟随者的数量,n是每个智能体的维数,δ是响应系数,且有ξ<min{λ(WσTWσ), 1}。
证明:遵循等式(12)和不等式(13)中的控制律,可得到如下不等式:

表1 拓扑结构的min{λ(He(Jσ))}

多智能体系统的闭环动力学为:

对于正实拓扑结构,(L +P)σ被转换为约当标准形。闭环动力学矩阵也被转换成对角块矩阵:
将不等式(13)替换为式(19),则有
仍然是对称的。根据定理1,He(Jσ)是正定矩阵。
根据引理5,可得不等式如下:
因此,

将不等式左边分别左乘(WσIN)T以及右乘(WσIN),可得到一个新的不等式:
根据引理5可得如下不等式:

备注5:与参考文献[22]相比,定理2中讨论的拓扑结构不必是一个平衡图,它在切换条件下扩展了有向拓扑结构族。典型的前向拓扑结构(如PF)不是一个平衡图(如图2中的)。此外,与参考文献[23]中的结果相反,定理2中停留时间对控制器的稳定性没有影响。
备注6:在实践中,切换拓扑结构可能是未知的,这使得对α的选择是非平凡的。较大的α有助于在这种情况下稳定切换系统。事实上,不等式(13)只是系统稳定性的充分条件,在理论上确保了系统的稳定性。在我们的仿真中,与这个不等式不一致的α也可使系统稳定。
5. 仿真结果
车辆队列是一种典型的多智能体系统,由于其在交通[24]中产生的益处而受到越来越多的关注。描述队列中的车辆之间信息流的典型拓扑结构的(L +P)矩阵具有正实特征值[15]。我们对一个包含6辆相同车辆的同质队列(1名领导者和5名跟随者)进行模拟以验证其有效性。对于队列的控制推导出每个车辆的三阶状态空间模型[17]:
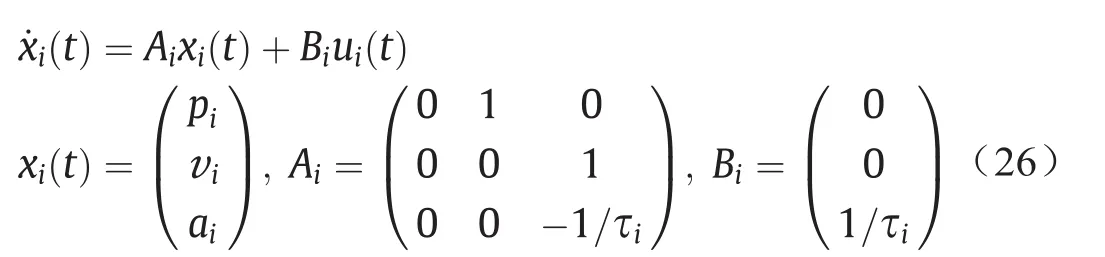
式中,pi, νi, ai表示每辆车的位置、速度和加速度;τi是车辆纵向动力学的惯性延迟,在模拟中设置为0.4 s。信息流拓扑结构如图2所示,其(L +P)矩阵的特征值都是正实数。系统的拓扑结构被设置为每2 s周期性地从切换到切换到,然后切换到,如图3所示。每辆车的初始速度为20 m·s–1,位置误差随机分布在区间[–10 m, 10 m]内。领导者被设置为在ν0=20 m·s–1情况下持续行驶。
三种拓扑结构的He(J)的特征值列于表2。所有的特征值都是正实的,考虑到它们的最小值,选择缩放因子α为10。在3个场景下进行模拟,两个有不同响应系数δ的稳定场景以及1个不稳定场景。场景1和2中的控制器参数的设计如定理2所示。然而,场景3中的参数不满足参考文献[15]中的稳定性条件。所有参数列于表3。
图4表明切换拓扑结构下车辆队列的状态误差。模拟结果表明,根据等式(12)和不等式(13)设计的控制律可以稳定车辆队列。与图5相比,结果表明较大的δ往往能够使系统更快收敛到稳定状态。图6说明根据参考文献[15]中不稳定区域准则选择参数的控制器性能,这表明本文控制器设计方法的有效性。值得注意的是,定理2只是系统稳定性的充分条件,这意味着若控制器参数α的选择不满足不等式(13)的条件,也可能稳定切换系统。
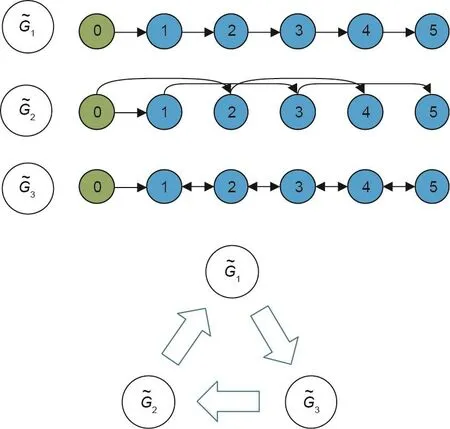
图2. 切换拓扑结构。都是正实特征值拓扑结构。是前向型,是前向-后向型。在模拟中,拓扑结构在这三种拓扑结构之间切换。
6. 结论
本文研究了一类(L +P)矩阵的所有特征值都是正实数的切换拓扑结构多智能体系统的稳定性。文中利用图论描述了交互拓扑结构,采用赫尔维茨判据和黎卡提不等式设计控制律,使多智能体系统达到稳定,并对系统收敛速度进行调节。通过采用共同李雅普诺夫函数定理,证明了切换拓扑结构系统的稳定性。本文为这类切换拓扑多智能体系统的稳定性提供了充分条件,若所有拓扑结构的(L +P)矩阵的特征值都是正实数,可实现切换系统的稳定性,且系统具有指数收敛速度,该收敛速度受控制器中响应系数δ的影响。
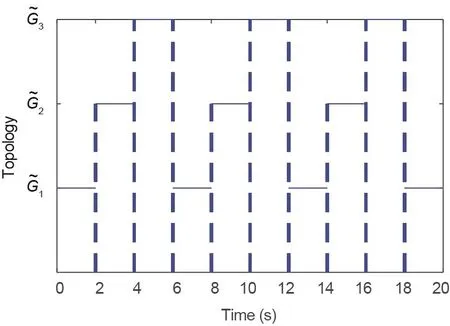
图3. 交换信号。驻留时间设置为2 s。
表2 的He(J)的特征值
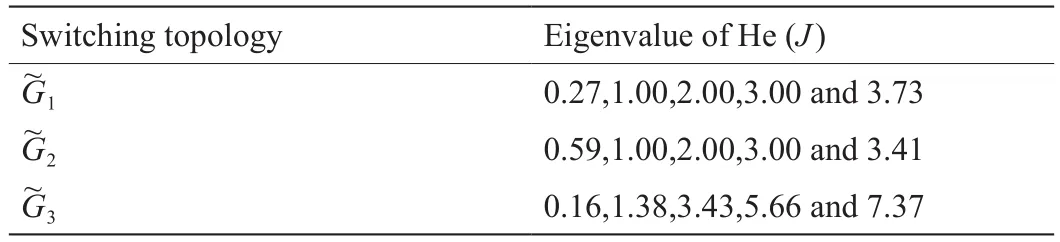
表2 的He(J)的特征值
Switching topology Eigenvalue of He (J)G~1 0.27,1.00,2.00,3.00 and 3.73 G~2 0.59,1.00,2.00,3.00 and 3.41 G~3 0.16,1.38,3.43,5.66 and 7.37
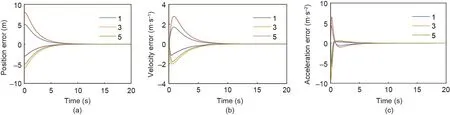
图4. δ=0.5的切换拓扑结构的稳定性。(a)、(b)和(c)分别表示位置、速度和加速度的跟踪误差。切换系统在15 s内达到稳定。
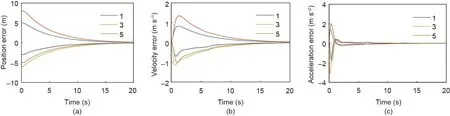
图5. δ=0.2的切换拓扑结构的稳定性。与场景1中的控制器相比,该控制器的收敛时间较长,约为25 s。

图6. 具有不稳定控制器的切换拓扑结构的稳定性。基于参考文献[15]中提出的不稳定区域设计参数。这表明本文控制器设计方法的有效性。
致谢
本研究得到了中国国际科技合作计划(2019YFE0100200)和北京市自然科学基金(JQ18010)的支持。还得到清华大学-滴滴未来出行联合研究中心的部分支持。
Compliance with ethics guidelines
Shengbo Eben Li, Zhitao Wang, Yang Zheng, Diange Yang, and Keyou You declare that they have no conflict of interest or financial conflicts to disclose.
