基于LK光流法的微流控芯片中流体速度检测
2020-09-03林宇凌金晓宏王中任
林宇凌,金晓宏,王中任
(1.武汉科技大学机械自动化学院,湖北 武汉 430081;2.湖北文理学院机械工程学院,湖北 襄阳 441053)
1 引 言
微流控技术,因其样品消耗量低、分析时间短、高通量和与大多数实验样品兼容等优点,使得目前的研究工具能够小型化和高效化[1],从而极大地促进了生物[2-4]、化工[5-6]、农业食品[7]等领域的发展。为了加速这些领域的发展,实时、准确地检测流体在微通道的运动,变得越来越迫切。通过检测出微通道内的流速状态,能便捷的获取流体的f粘度和微流体在芯片中流动的剪切力,这些信息能给广大研究者提供极大的帮助。Zuohan等[8]通过测量流体在PDMS微通道中运动的距离和流速,确定了样品流体粘度与参考流体粘度的比值,得到了样品流体的粘度。在某些应用中,需要确保在微通道内产生恒定的流速。如精确的试剂输送[9],生物分析[10]和细胞的力学特性的研究[11]。早在2006年Monica等[12]便指出除了微流控芯片本身的几何特征和其制作材料对化学反应的影响较大外,微通道内流速的变化对化学反应产物生成的控制起到了至关重要的作用,明确表达出流速精确控制的重要性。
但是微流控芯片管道尺寸很小,通道宽度常在几十微米到几百微米之间,导致常规的测量方法无法正常使用,使微通道中流体运动信息的量化受到很大程度的限制。2001年,Wu等[13]通过微加工手段在微流控芯片的微通道壁上安装了一个微型传感器,该传感器能通过测量温度变化计算出流速的变化,然而这种方法加工手法极其困难,不具备普适性。
近年来,图像处理作为一种非接触新型检测工具正得到空前的发展,具有广泛的功能,在微流控领域也有了一定应用,如监测比色反应的完成,细胞的分化和计数,以及跟踪运动细胞等。Esmaeel等[14]设计出一套成熟的多功能微流控视觉控制系统,运用机器视觉原理和多种图像处理算法完成了对微流道内液体流动的实时监测。蔡绍皙等[15]介绍了一种基于帧差法和形态学处理法的微流控芯片中流体直线运动的检测。马鹏飞等[16]提出了一种基于LK光流法的粒子图像运动方向和速度测量方法,充分体现了光流法的实用性和先进性。本文提出了一种适合微流控芯片中流体运动精确测量的方法:采用LK光流法和高斯滤波算法等图像处理算法,能有效地跟踪流动的液体,能精确地获取液体运动的速度和方向,稳定性好,效率高,也为预测并实时控制管中全位置流速奠定基础。
2 研究方法
图1为给定泵速下的微流控芯片中流体速度检测的流程图。
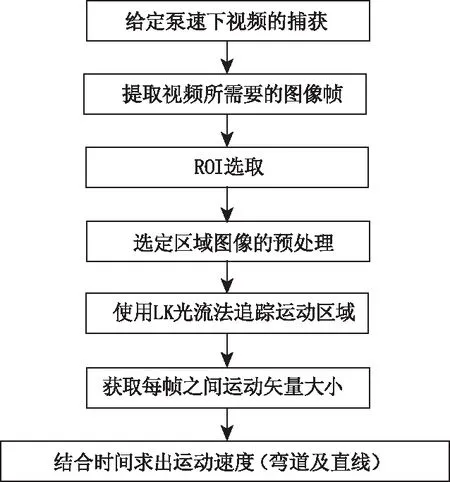
图1 速度检测流程图
2.1 实验平台及设备
本实验所搭建的平台如图2所示,采用的相机为加拿大的GS3-U3-50S5c-c型灰点相机,像元尺寸为3.45 μm,实验中相机的帧频为15 f/s,图片大小1936×1388 pixels,传感器类型为CCD,芯片尺寸2/3″,焦距30 mm;光源采用可调节白色背光源;可编程注射泵连接的是最大体积为60 mL的注射器;芯片采用的是PIE-14-007混合型芯片,上板材料为PC,下板材料为Elastomer,外观尺寸为55 mm×25 mm×4 mm,微通道宽度200 μm,深度50 μm,截面为矩形截面;观测部分采用经典的三目显微镜结构,光学放大倍率0.7×~9.0×,标配10×目镜;为了得到像元尺寸和实际尺寸的对应关系,选用刻度间距为1 mm的坐标纸标定相机;恒温槽控制温度为20 ℃;采用墨水为本实验流体。
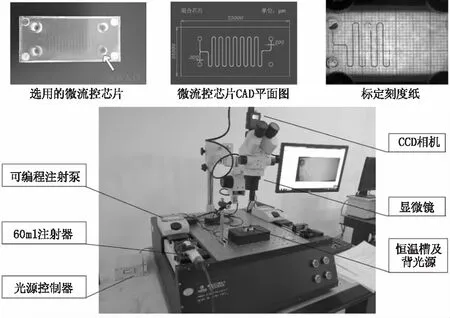
图2 实验平台及相关设备
2.2 运动区域目标检测原理
运动区域目标检测是指对序列图像的运动区域进行检测与识别,实现目标跟踪,获取目标的位姿等相关信息,并对这些相关信息进行分析和处理。近年来,运动目标检测算法层出不穷,但较为经典的算法可以分为帧差法、背景减法以及光流法三种。其中帧差法虽然算法简单、适应力强,但通常很难获得运动物体的完整轮廓,容易出现“空心”现象;背景减法是通过视频帧信息建立背景模型,从输入的视频序列中减去背景模型从而得到前景对象的一种算法。背景减法虽然也相对简单,而且实时性较高,但其对背景质量要求较高,十分敏感;光光流法相比这两种算法,其复杂度较高、对亮度的稳定性要求较高,其最大的缺点是跟踪物体时容易丢失[17]。但光流法不仅可以迅速检测到运动的物体,而且能准确地得到物体运动的速率和方向信息。光流法不需要背景建模和背景更新,产生的运动物体不会出现“空心”现象。本实验中,背景光源亮度大,稳定性高,不易丢失,且不同帧之间运动距离较短,适合光流法的使用。
2.2.1 光流算法原理
光流法实现由如下三个假设:
(1)亮度一致性;
(2)两帧之间运动较小;
(3)空间一致性。

图3 光流算法原理
2.2.2 光流约束方程
设I(x,y,t)为t时点(x,y)处的亮度值,I(x+dx,y+dy,t+dt)为t+dt时(x,y)处对应像素的亮度值,由亮度一致性假设,有:
I(x,y,t)=I(x+dx,y+dy,t+dt)
(1)
将上述右边用Taylor级数展开,由于光流定义(u,v)=(dx/dt,dy/dt),可将(u,v)=(dx/dt,dy/dt)用(u,v) 替换得到光流的基本方程:
(2)
即光流约束方程:
Ixu+Iyv+It=0
(3)
然而由于孔径问题的存在,仅仅依靠一个光流约束方程无法求解两个未知量(u,v),因此需要引入其他的约束条件。各种不同的新约束条件创建了各式各样的光流法,建立了新的约束方程,使该方程的解唯一。
2.2.3 Lucsa-Kanade(LK)算法
Lucas-Kanade(LK)算法是一种经典的稀疏光流算法,它是1981年由Lucas 和Kanade提出来的。LK算法计算的是相邻两帧之间细微运动的对应像素的运动信息,从而得到光流矢量。
LK算法假设在一个小的空间邻域Ω内运动矢量恒定不变,然后对区域内的每个点赋予不同的权重。假设有n个像素在邻域Ω内,那么每个像素都应满足:
Ixiu+Iyiv+Iti=0i=1,2,…,n
(4)
光流的基础约束方程变为:
Ec(u,v)=∬[Ixu+Iyv+It]2dxdy
(5)
在邻域Ω内,Lucas-Kanade光流的误差为公式为:
ELK(u,v)=∬W2(x,y).(Ixu+Iyv+It)2dxdy
(6)
其中,W(x,y)={wi|i=1,2,…,n}是邻域中每个点的权值,其分布特征是离中心越偏离,对应的权值越小。
将式(6)离散化,得到:
(7)
其中,IxiIyiIti为领域内各点像素在x、y、t方向的梯度值;wi为各点的权值。令:
(8)
W=diag(wx1,wx2,…,wxn)
(9)
b=[It1,It2,…,Itn]T
(10)
则式(7)可表示为:
(11)
式(11)可改写为:
(12)
即为所求光流矢量。
2.3 图像处理过程
如图4所示,本实验中图像处理过程包括预处理中的选择ROI区域、彩色图像转为灰度图像、高斯滤波;包括运动检测部分的计算光流场、对光流场进行阈值分割、转换光流矢量为两个分量、计算光流矢量大小。

图4 图像处理流程图
本实验仅测量单相流动的运动状态,为了测量的稳定性,选取了中间一段弯管处(第12个半圆形弯处)的图像为感兴趣区域,并研究在该区域的运动状态。本研究不需要图像中的颜色信息,可以将其转换为灰度图像,以加快处理速度。由于背景噪点会影响光流法的计算精度,这里在计算前采用了高斯滤波处理以平滑图像。以上预处理步骤如图5所示。
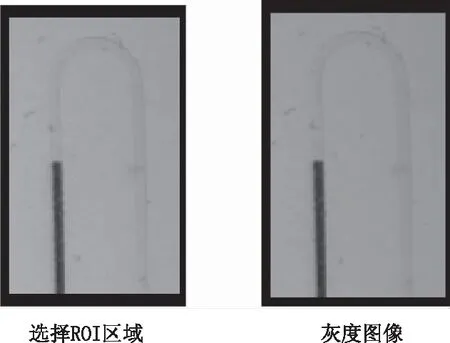
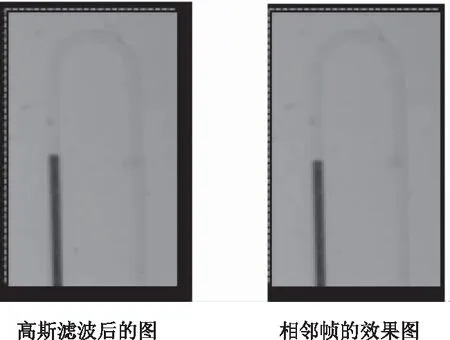
图5 图像预处理
图6则展示了LK光流法及其相关操作的结果,先是划分网格计算光流场,然后通过阈值分割筛选掉因图像有未过滤掉的噪点而产生的孤立光流矢量,最后将选定的光流矢量转换为行列两个实值图像并求解。将这些值求平均作为两帧图像之间运动距离。
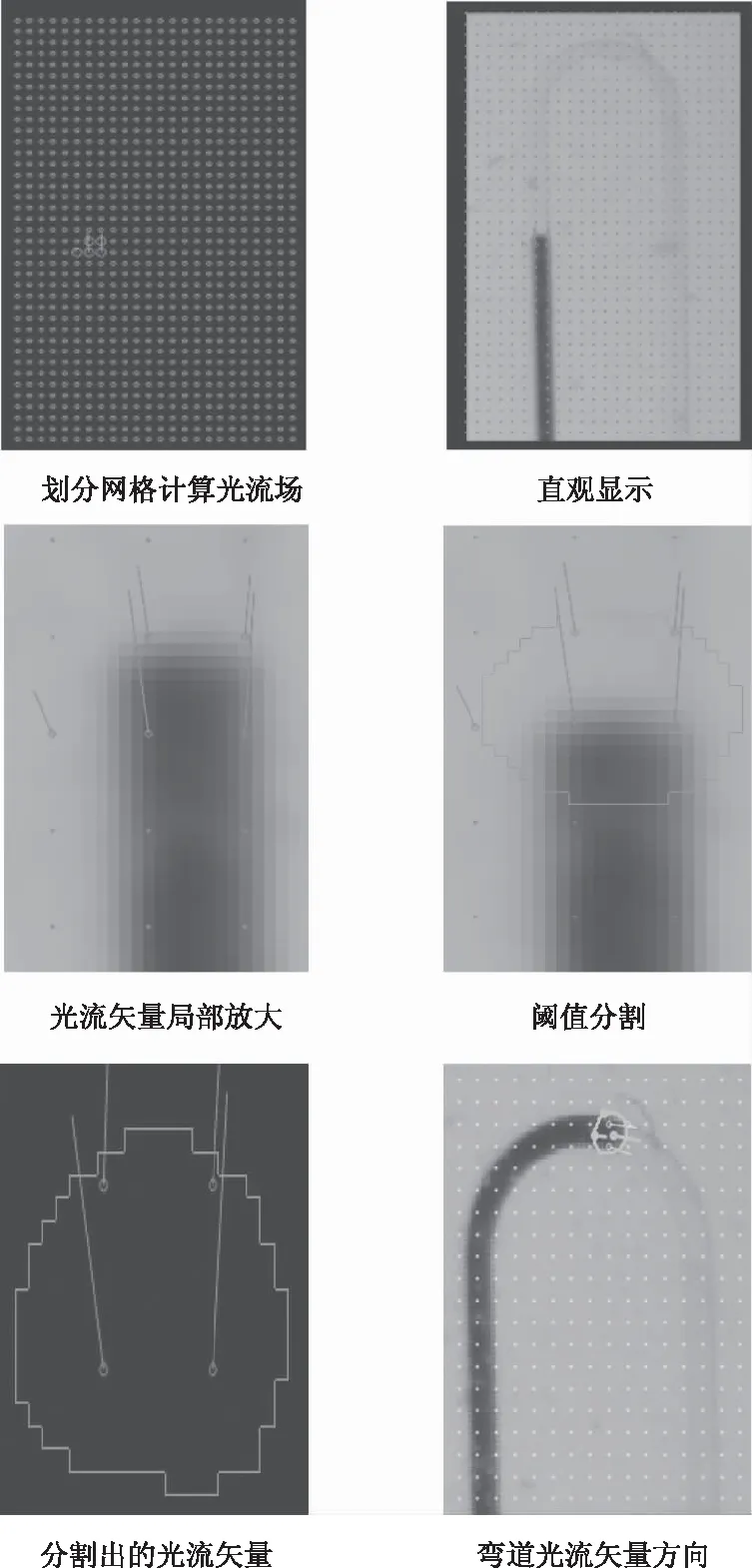
图6 LK光流法处理过程
3 结果与讨论
设定注射泵恒压泵送,选取液体在入弯前及刚入弯时的连续30帧图像,相邻两帧间隔1/15 s。检测结果如表1和图7。可见不论是在直线处还是弯道处,其像素速度十分稳定,且精度较高。其标准差σ<1,因此光流法检测该微流体运动信息具有良好的可重复性,稳定性较好。也能直观的看到直线处的流动速度总体大于弯道流速,所得数据有较好的学术研究价值。表2和图8是另一处直线和入弯处连续30帧测得的数据。

表1 流速检测结果

表2 另一处流速检测结果
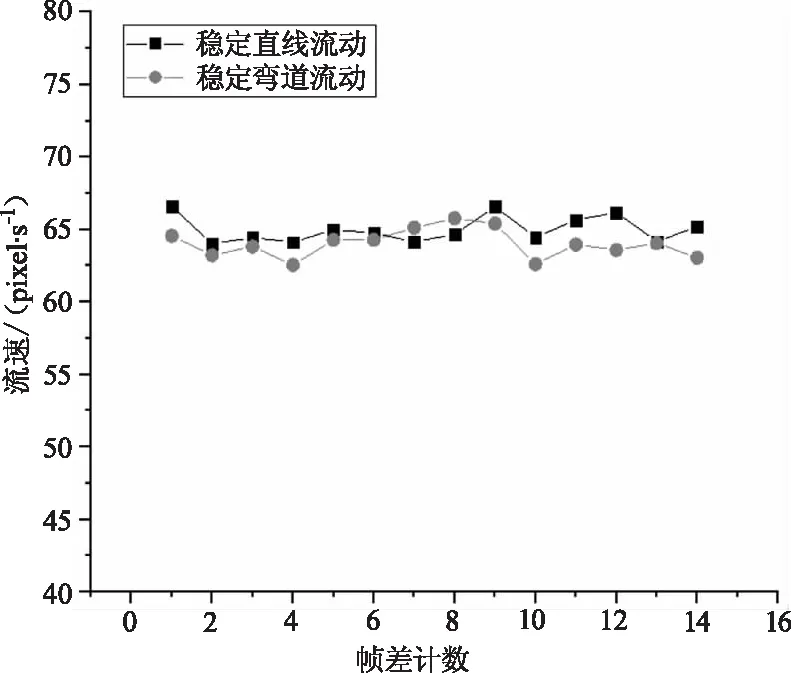
图7 流速折线图
本本方案图像采集端最小分辨率为1 pixel,精度为0.01 mm。总体精度理论上无上限,该方法精度可由三方面控制:一方面在于标定的精度控制,可使用更小刻度的标定刻度纸来提升标定精度;一方面可以通过提高分辨率、增加视频帧数来提升精度;另外还可通过算法的实时优化如平滑函数的参数变化和阈值处理的范围调整或是光流场网格的设计来提升精确度。实验中,可参考自己所需精度,综合调整以上因素来完成目标。
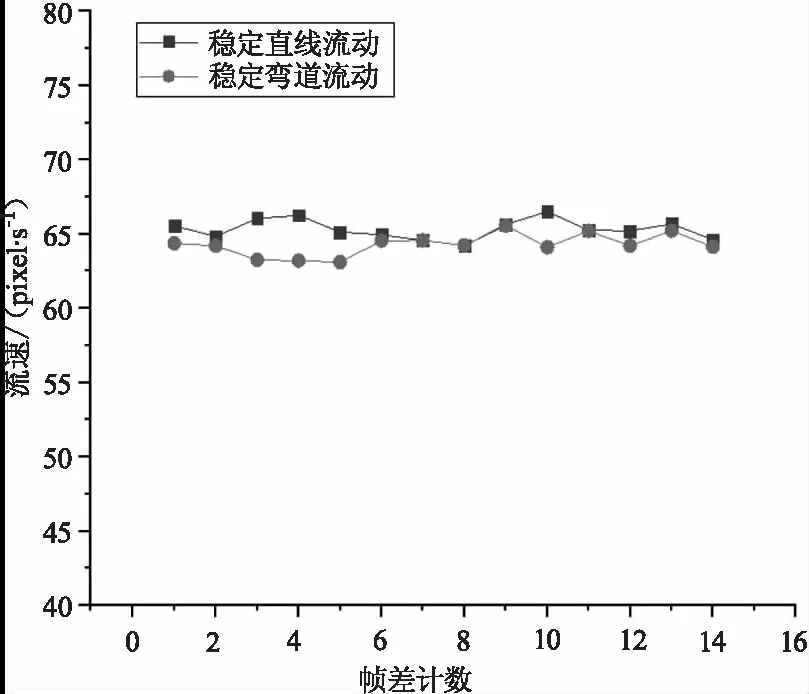
图8 另一处流速折线图
在某些应用中,需要确保在微通道内产生恒定的流速。如精确的试剂输送,生物分析和细胞的机械特性研究。该方法能十分简单且精确的测得微流控芯片恒压或随机稳定流体的流速,还可以通过设置不同压力源泵速来观察芯片中的流速,从而预测各个泵速下流体在芯片中全位置的流速,为需要特定流速的生化反应提供了便利。而且通过流速的测量,也能更容易的推出流体粘度和流动的剪切力。
4 结 论
微流控芯片中流体运动速度的检测及量化目前还没有得到广泛的研究,结合目前微流控领域图像处理方法运用不足的情况,提出了运用LK光流法并结合其他图像处理方法的一种跟踪检测技术。实验结果表明,该方法能实时跟踪运动的液体,精度高,效率高,且稳定性强,在微流体学的应用中是一个非常有用的工具。由于缺乏图像处理方面的专业知识,来自非工程背景的微流体研究人员常常无法使用这种工具,相信文中方法能给广大研究员提供一个新的思路,为微流控芯片的发展以及更广泛的应用奠定基础。
