基于惯性传感器的体感手环教学系统的设计
2020-09-02陈崇辉
陈崇辉,邓 筠
(华南理工大学广州学院 电气工程学院,广州 510800)
0 引言
教师在课堂多媒体教学中,普遍使用微软公司PowerPoint软件设计的演示文稿PPT课件[1],典型的场景是教师手握激光笔,头戴无线话筒,可在教室内随意走动完成教学工作。目前存在的主要问题有:教师必须手握激光笔,阻碍了教师手势讲解等方面的灵活演示[2];无线话筒的音量大小只能在讲台上手动调节,使用不够方便;教师用话筒讲话过程中可能会出现话筒啸叫(突然发出高音)的现象,实在令人难以忍受,并严重影响教学气氛。
本文应用惯性感测技术设计了一种体感手环教学控制系统,惯性感测主要是以陀螺仪、加速度计等惯性传感器来感测使用者肢体动作的物理参数,从而求得使用者在空间中的各种动作[3-4]。只要使用者手腕佩戴体感手环,通过特定的手势动作就可以进行计算机PowerPoint软件遥控翻页,就可以控制无线话筒的音量大小,并有效自动抑制话筒啸叫对现场的影响。
1 系统总体方案设计
本系统主要由体感手环和教学接收装置组成,结合现有的无线话筒和接收,功放和音箱,计算机和投影等,成为一套完整的体感手环教学控制系统,其系统结构如图1所示。教师佩戴体感手环,系统对教师特定手势动作的识别,即可通过手势动作遥控幻灯片翻页,从而能够让教师在课堂上真正把双手解放出来,用于教学的手势辅助讲解和演示,给予师生最大程度的沟通和交流,提高教与学的效果[1];同时,教师佩戴无线话筒,功放把无线话筒接收到的声音信号放大并驱动音箱进行广播,教师可以通过特定的手势动作对话筒音量大小进行控制,当教师讲话过程中出现话筒啸叫现象时,系统会自动对话筒声音直流成分幅度进行实时提取,从而控制话筒音量迅速减小直至静音,保证课堂的教学氛围。
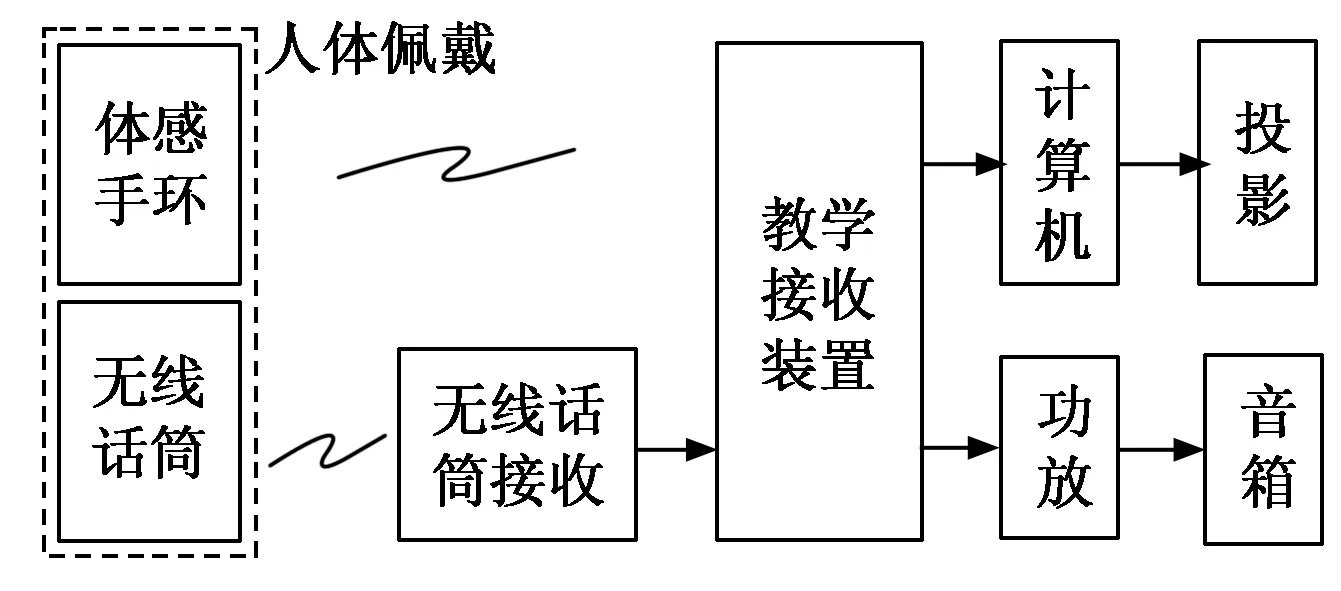
图1 系统结构框图
2 体感手环设计
2.1 手环总体设计
体感手环的设计需要符合普通人的操作习惯,以佩戴在使用者的右手手腕上部为宜,要求体感手环至少能够识别操作者4种手势动作,识别的成功率在92%以上,误动作率在4%以内;佩戴体感手环的使用者在在教室内随意走动仍能实现无线数据的传输,从而实现对PowerPoint幻灯片向上或向下翻页以及对无线话筒的音量大小调节的无线操作功能。
体感手环由惯性传感器、微控制器和无线数据模块组成。微控制器从惯性传感器获取手势动作数据,算法处理后,对手势动作进行定义,并提取手势特征,实现对特定手势动作的识别,然后通过无线数据模块把手势动作对应的特征代码传输给教学接收装置。手环总体如图2所示。

图2 手环总体框图
2.2 惯性传感器电路设计
在体感手环中,手势动作由惯性传感器MPU6050采集数据。惯性传感器原理如图3所示,通过I2C控制总线2个引脚与微控制器通信[5-6]。如果微控制器内部该引脚已有上拉电阻,则电阻R2和R3可以省略。图3中芯片第12引脚INT是中断功能,如摇晃、自由落体等均可触发产生中断信号,在本设计中没用到中断,所以该引脚悬空;芯片第9引脚AD0通过电阻R1接地,设置该引脚为低电平,此时器件地址设置为十六进制数0x68。微控制器通过总线读取芯片的器件地址数据是否为0x68,可作为判断微控制器与MPU6050之间I2C通信是否正确的依据。硬件电路连接正确,提供合适的工作电源3.3 V,MPU6050上电默认时钟是内部8 MHz 振荡器,微控制器与MPU6050之间底层驱动通信的时序也正确的前提下,微控制器首先对MPU6050的寄存器进行软件初始化配置,主要有电源管理寄存器1、陀螺仪配置寄存器、加速度计配置寄存器、采样频率分频器寄存器、中断使能寄存器以及电源管理寄存器2等,接下来就是读取原始数据,从而获取手势动作数据做好准备。

图3 传感器原理图
2.3 手势动作定义
教师授课过程中可能会出现各种各样的手势动作,只有特定的、被定义了的手势动作才会用于系统的控制,而其余未被定义的手势动作均认为是伴随讲解过程中产生的噪声,这个噪声会随着不同的使用者而不同。
手势动作定义基本原则是设备易于识别手势;对于使用者来说,容易学习和记忆,操作简单,便于重复。本文定义了如表1所示的4种手势动作。以使用者右手手腕佩戴手环为例,当手掌面垂直于地面,使用者用力向左或向右一挥,此时对应的两种手势动作定义为幻灯片PPT的上一页或下一页操作;同理,当手掌背向地面,用力向上一挥对应的手势动作定义为无线话筒的音量增加,当手掌心向地面,用力向下一挥对应的手势动作定义为音量减小。这4种特定的手势动作是典型的代表上下左右的操作,实现系统的功能。
2.4 手势特征提取
手势特征提取是针对一个完整、有效的手势动作,主要有手势起终点、手势长度、手势能量以及手势波峰数等特征[7]。在进行有效手势信号截取前,必须要准确检测手势起点和终点,通过连续采样多个数据来降低环境噪声和用户手势抖动引起的冗余数据,从而实时截取有效手势动作的信号数据。从手势动作起点开始到手势结束的时间差值,定义为手势长度,一般手势动作持续的时间长度为零点几秒,否则很可能是无效手势动作。一次有效手势动作在运动过程中的剧烈程度称为手势能量,手势能量在不同频段内的分布随时间变化持续呈现不均衡现象[8],但手势能量明显过大或者过小,则很可能是误操作手势动作。手势波峰数是各轴的波峰数之和,所以重点是计算每一个坐标轴的波峰数,累计波峰的个数即可得到该轴的波峰数,进而计算得到加速度波峰数和角速度波峰数,一次有效手势动作的波峰数不为0[9],否则很可能是误动作手势而不予处理。
2.5 手环软件流程设计
通过微控制器获取惯性传感器MPU6050的数据,MPU6050里面集成了三轴陀螺仪和三轴加速度计,其中加速度计的三轴分量ACC_X、ACC_Y和ACC_Z均为16位有符号整数,根据3个轴向上的加速度是正值或负值,判断手环里面的传感器器件是沿座标轴负向或正向运动,从而识别佩戴的手环是向左或向右挥动的方向;得到的数据经过姿态解算和卡尔曼滤波算法等信号处理,去掉未被定义的手势动作噪声数据,再根据手势动作特征提取,判断是否是已定义的有效手势动作,如果是则查找表格得到特定手势动作对应的数据,如果不是则丢弃该组数据不予处理。每一种已定义的手势动作均使用一个特定的数字代码表示,并通过无线数据模块发射出去,等待教学接收装置接收。体感手环流程如图4所示。
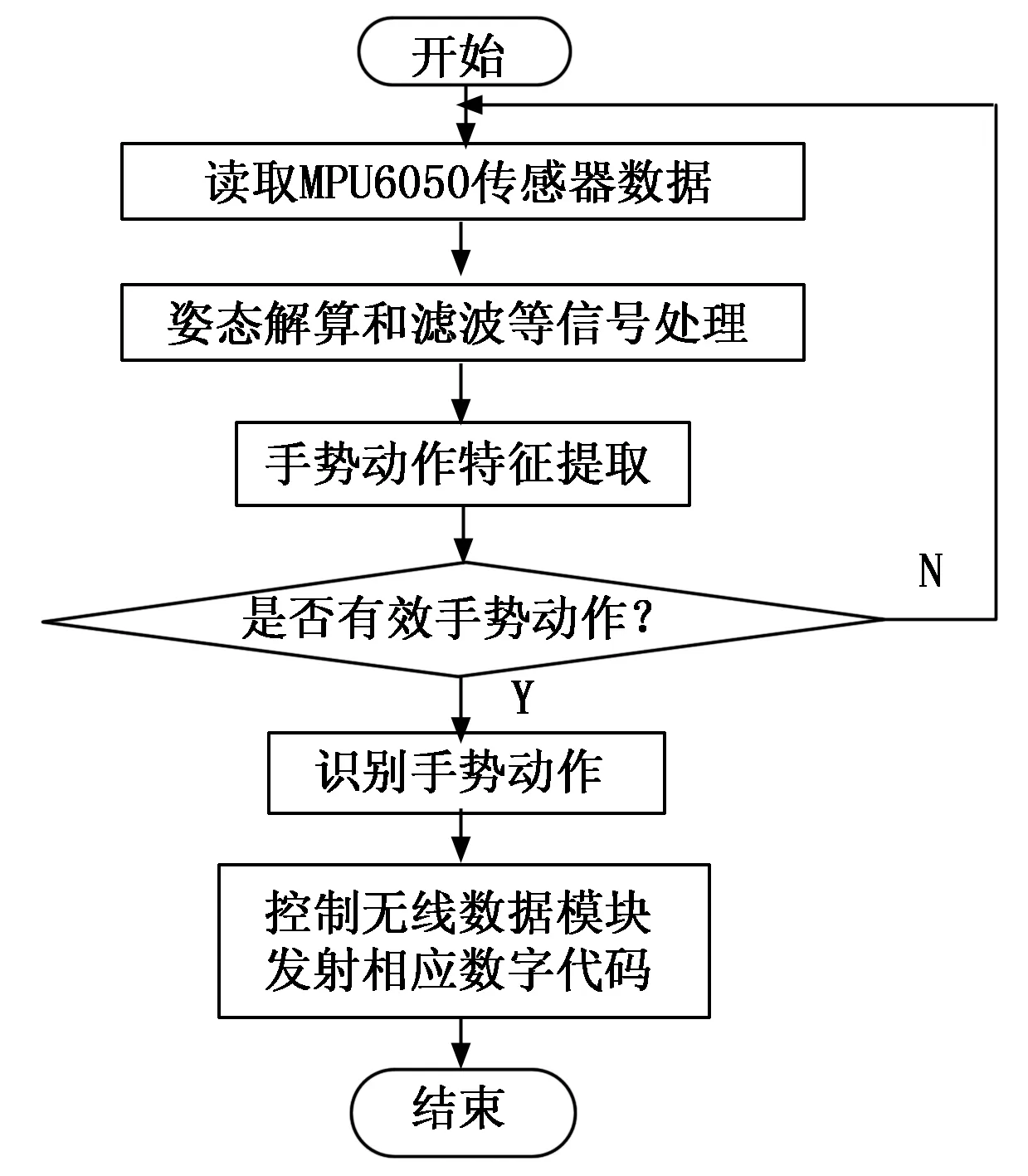
图4 体感手环流程
3 教学接收装置设计
3.1 接收装置总体设计
教学接收装置的设计需要具有和计算机方便连接的USB端口,具有和功放输入兼容的音频端口,其作用有两个方面:第一方面负责接收体感手环发送过来的控制数据,通过USB键盘接口芯片与计算机通信,从而控制PowerPoint软件翻页功能;第二方面负责处理无线话筒音频信号,通过数字音量控制电路对话筒信号进行大小处理,从而实现话筒音量大小的控制功能。教学接收装置以微控制器作为核心,调动A/D模数转换模块、数字音量控制电路、无线数据模块以及USB键盘接口芯片协调工作。接收装置总体如图5所示。微控制器芯片采用IAP15W4K58S4单片机,其内部集成有4组全双工异步串行通信口(UART)[10],可方便与蓝牙无线数据模块交换信息,接收数据,实现体感手环与教学接收装置之间数据的无线传输;当单片机接收到控制PowerPoint软件翻页指令时,单片机输出控制信号给USB键盘接口芯片,从而把控制指令通过USB接口传输给计算机,实现翻页功能;当单片机接收到控制话筒音量大小指令时,单片机与数字音量控制电路串行数据通信,通过对相应寄存器的操作,从而控制话筒音频的衰减量,实现话筒音量大小控制功能;单片机内部也集成10位精度的A/D模数转换模块,可将连续变化的话筒音频信号模拟电压转化成相应的数字信号,并进入单片机处理。当对着无线话筒讲话过程中出现话筒啸叫的现象时,A/D模数转换模块得到的数字量会显著增大,并超过预设的阈值,此时单片机控制数字音量控制电路,使话筒音量迅速减小直至静音,待啸叫消失后,自动恢复话筒的音量,最大程度减少话筒啸叫对教学课堂的影响。
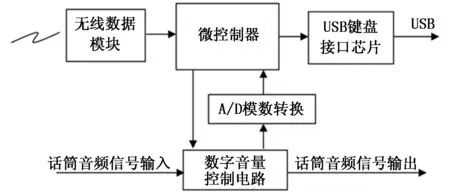
图5 接收装置总体框图
3.2 无线数据模块设计
无线数据模块采用蓝牙数据透传模块实现,教学接收装置和体感手环中分别设计有蓝牙模块,能满足在教室内随意走动并可靠实现无线数据传输,硬件电路方面相类似,蓝牙数据模块电路图如图6所示;软件流程方面由于体感手环蓝牙模块工作于从模式,所以教学接收装置蓝牙模块应工作于主模式方能正常建立连接,实现数据传输。单片机IAP15W4K58S4芯片内部集成有全双工异步串行通信口,与蓝牙模块连接实现体感手环手势数据实时传输到教学接收装置软件处理。蓝牙模块工作状态通过图6中LED的显示状态传递给用户,当LED以0.8秒一亮一灭均匀慢速闪烁时,表示等待体感手环配对;当主从两个蓝牙模块之间成功建立连接后,LED将会常亮,表示可以传输数据。

图6 蓝牙数据模块电路图
3.3 数字音量控制电路设计
数字音量控制电路原理如图7所示,采用PT2257双通道音量控制芯片,该芯片通过I2C控制总线技术与微控制器通信,在串行时钟SCL为高电平期间,串行数据SDA高低电平的变化定义为总线的启动或者停止信号;当SCL为低电平期间,SDA高低电平的变化作为数据的传送。PT2257每次传送8位数据,包含音量衰减量、声道选择以及静音控制位,传送时高位数据在前,低位数据在后,传送完成后必须紧跟一个应答位[11]。本系统中通过设置音量衰减量就可以实现对无线话筒音量的控制,在出现话筒啸叫现象时,微控制器AD0检测到话筒声音直流成分幅度明显瞬时增大,此时设置静音控制位即可静音话筒,消除话筒的啸叫。
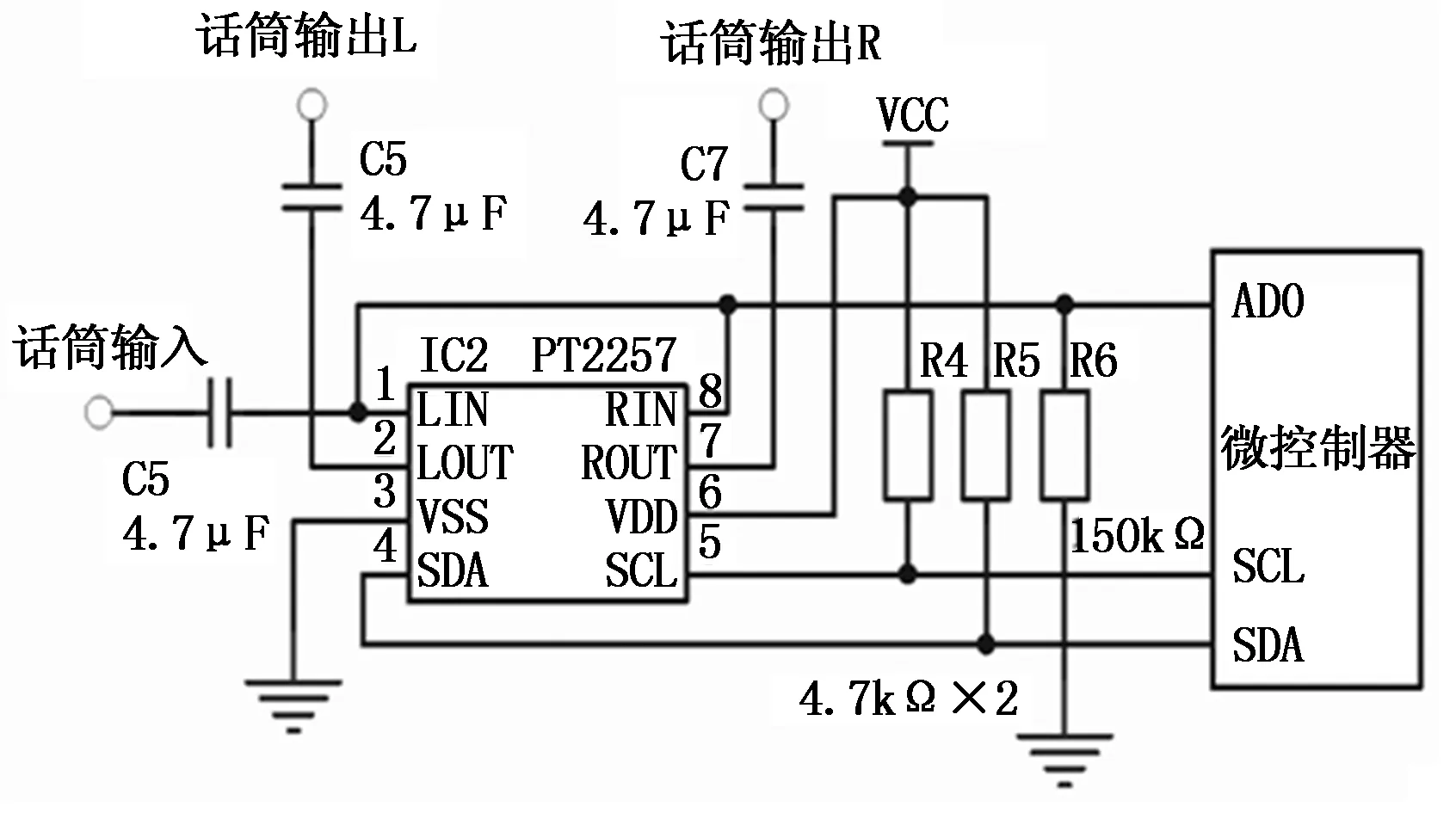
图7 数字音量控制电路原理图
由于无线话筒音频信号不分左右声道,不具备立体声功能,所以左声道输入LIN和右声道输入RIN并联在一起作为信号输入端,经过PT2257处理后的话筒音频输出信号分开左右声道分别输入功放进行放大,从而完成无线话筒音量的控制。
3.4 教学接收装置流程设计
当微控制器通过无线数据模块接收到佩戴体感手环的使用者的手向左或向右一挥对应的数字代码00或01时,表示使用者需要对接收装置进行控制了。此时微控制器输出控制信号通过USB键盘接口芯片控制计算机PowerPoint软件翻页。教学接收装置流程如图8所示。同理,当手环向上或向下一挥发出对应的数字代码02或03时,表示使用者正在进行无线话筒音量增大或减小的远程控制操作。
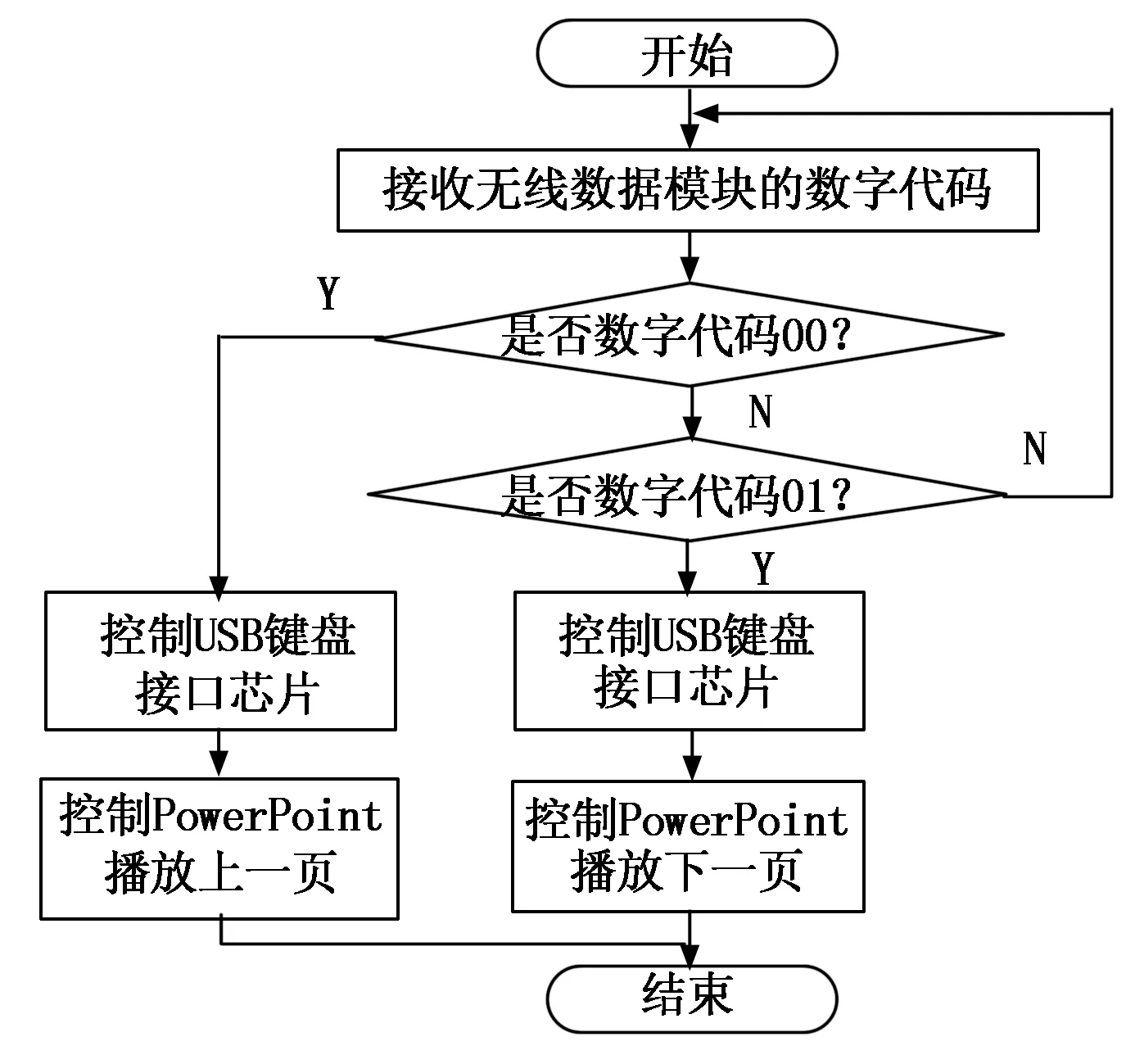
图8 教学接收装置流程
3.5 消除话筒啸叫流程设计
A/D转换器能够实时采样无线话筒的音频信号的变化,并输入单片机处理。先进行程序判断滤波算法,剔除掉因随机干扰、误检测或系统不稳定等偶然因素引起的尖脉冲干扰信号;再利用滑动平均滤波算法,抑制数据中可能出现的周期性干扰成分,如无线电波引起的高频干扰[12]。
程序判断滤波算法是通过实践经验估算,得到相邻采样数据允许的最大偏差值DT(取值为某个数字)[12]。对当前话筒声音A/D转换值进行判断:如果当前A/D值与之前的值相差的绝对值大于某个阈值DT,则当前值无效,并保留之前值;否则就认为是有效数据,当前A/D值就成为话筒声音最新数据,如式(1)所示:

(1)
在没有外部额外的各种干扰的前提下,通过滑动平均滤波算法,把连续N个对话筒声音的采样值(N是一个具体的数字)当作一个具有N个元素的数组,每次A/D转换完成就刷新最后一个数据,并剔除数组原来最前的一个数据,然后对数组中的N个数据进行算术平均运算,获得新的话筒声音的滤波结果。式(2)为算术平均计算公式:
(2)
此计算结果数据用来阈值甄别。当对着无线话筒讲话过程中出现话筒啸叫的现象时,系统自动对声音频率曲线上的峰点对应的频率成分进行提取,一旦检测到数据达到或超过阈值信号,单片机控制数字音量控制模块,使话筒音量迅速减小直至静音,待啸叫消失后,自动恢复话筒的音量,最大程度减少话筒啸叫对教学课堂的影响。消除话筒啸叫流程如图9所示。
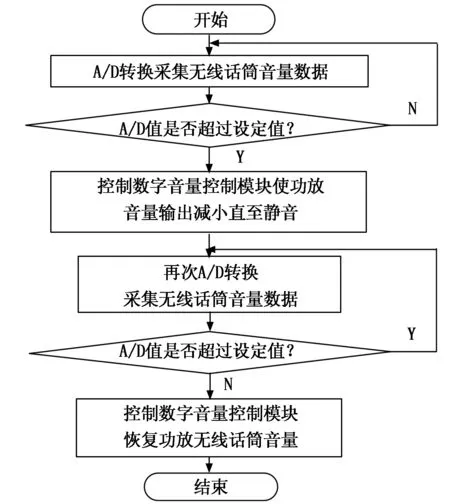
图9 消除话筒啸叫流程
4 系统测试与分析
为了缩小手环体积,元器件均使用贴片封装,经过软件Altium Designer进行电路原理图和PCB设计、发单外面公司打样、元器件焊接与程序调试等环节,对照电路原理图全面检查各芯片、单元电路、模块电路是否均正确连接,是否都能够正常工作,特别是传感器MPU6050、蓝牙模块、锂电池充电芯片等。经过多次参数调整与修正,直至系统能够正常稳定地工作。
测试人员佩戴体感手环,以一个100页面的PPT幻灯片作为实验测试,向左、向右、向上和向下一挥的手势动作测试各100次,成功率在92%以上,误动作率在4%以内,实验具有一定的随机性,测试数据如表2所示。
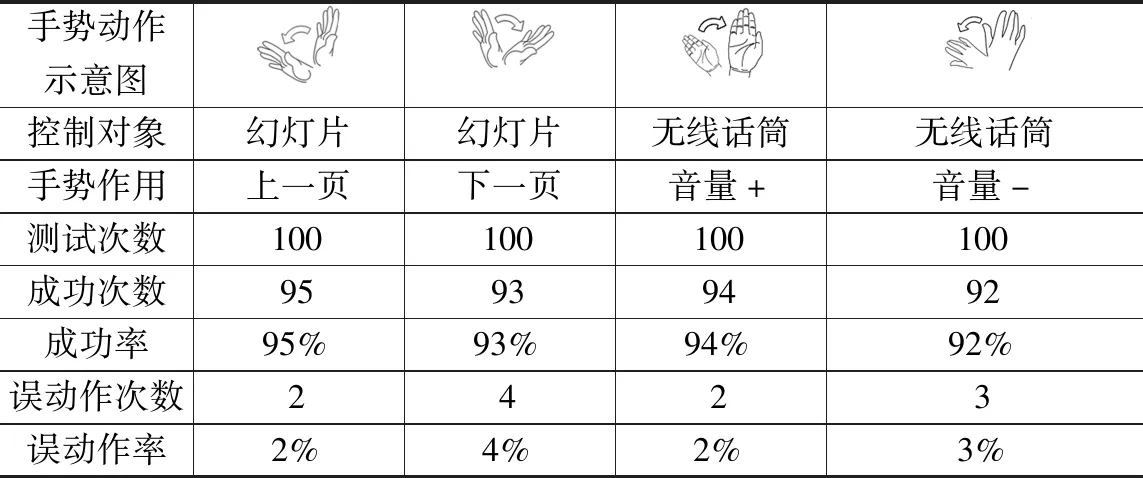
表2 测试数据
从表2测试数据可以看出,体感手环可有较高成功率识别手势动作,教学接收装置能够可靠接收数据并控制PowerPoint软件向上或向下翻页、控制话筒音量的大小;当出现话筒啸叫现象时,能够及时有效地抑制刺耳的噪声,保持良好的教学氛围,提升课堂效果。
5 结束语
本文针对课堂教学中通过体感手环遥控PPT幻灯片翻页进行了设计,提出体感手环教学控制系统的系统结构,重点对手势动作的特征展开研究,并对系统硬件电路原理及软件流程进行设计与调试,特别是论述了话筒啸叫的消除方法。实验证明体感手环教学控制系统在课堂教学中可以有效地识别教师遥控幻灯片翻页的手势动作,能够实时缓解话筒啸叫引起的干扰,把教师的双手回归到教学手势的讲解和演示,促进教学效果的提升。
