2BMS-14 小麦智能施肥播种机研制与效果试验
2020-08-27张俊杰彭发智焦海涛李霄鹤张西群陈敬者
张俊杰,彭发智,焦海涛,李霄鹤,张西群,陈敬者
(河北省农业机械化研究所有限公司,河北 石家庄 050051)
播种是小麦生产过程中的重要环节,也是小麦生产过程中最为耗时费力的环节,并且要在较短的时间内完成,其中播种机是影响播种质量的关键因素。目前我国市面上小麦播种机排种器多采用外槽轮式,通过人工手动改变外槽轮的工作长度实现播量的调节[3,4],播种作业时需要先计算出单位面积播量,操作方法一般是通过拖拉机借助悬挂架将后部工作机构抬起,然后人工旋转限深轮(或者镇压轮)通过链传动间接驱动播种机构、施肥机构转动,人工计圈,转动到一定圈数后开始计算漏下的种子或者是肥料的质量,然后将该计算结果推广至整个工作长度上,最终得到所需的种子量或肥料量。人工计数、人工转动限深轮(或者镇压轮)都是比较费力的,而且在计数过程中难免会出现差错,影响最终的准确率。在施肥播种机作业时,机具驾驶人员无法实时观测播种作业情况,往往在机具后需跟随一名观察人员,如遇播种、排肥不畅,观察人员需及时敲打排种器/排肥器或种肥管,易对种子造成伤害,同时影响排种器精度和寿命。因此需研制一种小麦智能电动施肥播种机,利用电机调节施肥量与播种量,并且在施肥与播种作业时实时监测作业情况,发现堵塞与漏播现象及时查看解决,减少作业人员人数、降低劳动强度。
1 2BMS-14 小麦智能施肥播种机的设计
2BMS-14 小麦智能施肥播种机由播种机械结构装置、施肥机械结构装置、电动控制系统和施肥播种监测系统组成。
1.1 结构设计
2BMS-14 小麦智能施肥播种机机械结构由机架、肥料箱、种箱、槽轮式排种器(施肥和播种均采用外槽轮式)、双圆盘开沟器(施肥、播种均采用双圆盘开沟器)、施肥传感器、播种传感器、监测报警器、施肥直流电机、排种直流电机、电控控制系统、播种镇压轮、编码器等组成。
肥料箱和种箱平行排列于机架上,槽轮排种器经六棱钢穿插后安装于种肥箱下端对应的种肥口。施肥传感器和播种传感器分别与槽轮排种器的种肥口对应安装,传感器下端连接种肥管。种肥管下端与圆盘开沟器对应连接,种肥管上端直接插入排种器外露的种肥口上。
监测报警器安装于拖拉机方向盘前下方,便于驾驶员观测。施肥传感器安装于施肥口下方、肥料管上方,施肥传感器与肥料盒通过紧固销紧固、与肥料管安装通过管箍紧固,施肥箱下方设有14 个施肥口,由于监测每个肥料管的肥料堵塞情况,因此施肥传感器设有14 个。播种传感器安装位置和方式与肥料传感器相同,种箱下方设有14 个排种口,由于监测每行种子漏播情况,所以与传感器安装数量与排种口数量相同。施肥与播种直流电机置于种肥箱右侧面,横穿外槽轮排种器的六棱轴穿插直流电机六棱孔,将直流电机与肥料箱侧板通过螺栓紧固于种肥箱右侧。
电控控制系统设置于种肥箱左侧。编码器通过联轴器安装于地轮轴一端,与地轮轴同轴。
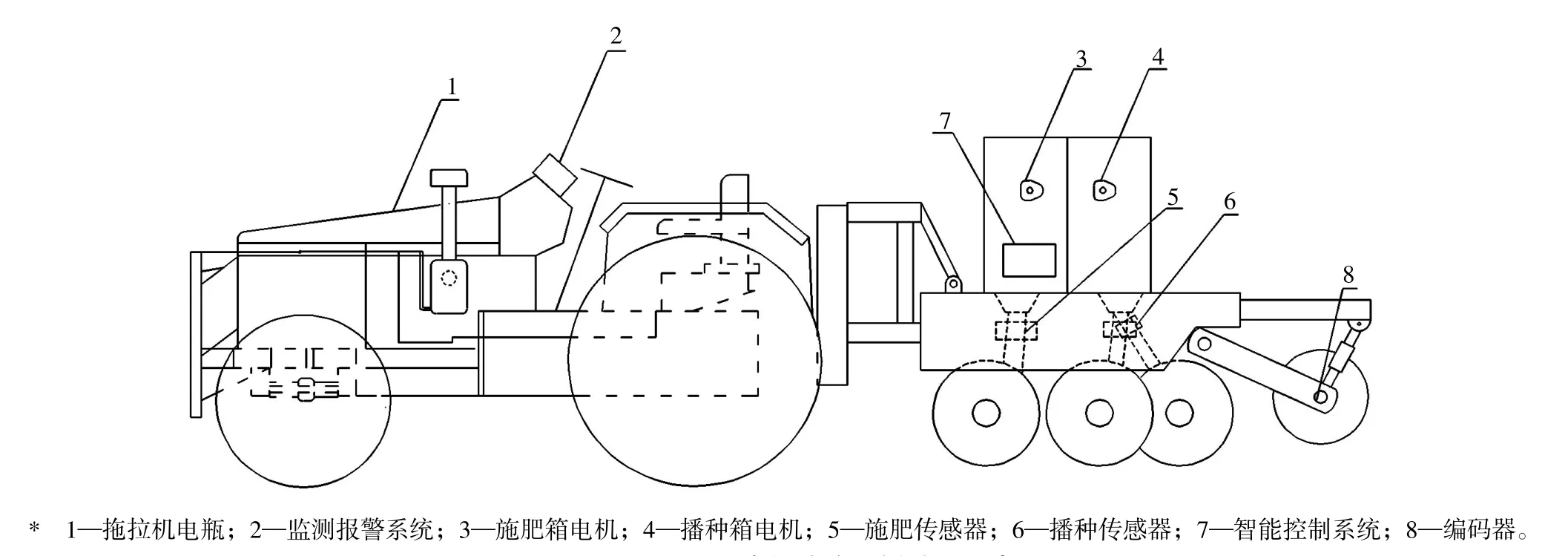
图1 2BMS-14 小麦智能施肥播种机示意图Fig.1 Schematic diagram of 2BMS-14 wheat intelligent fertilizer and seeder
1.2 工作原理
监测报警系统和智能控制系统的电源线与拖拉机电瓶连接,电路接通后,拖拉机向前行驶工作,带动地轮转动,安装在地轮轴末端的编码器采集地轮转速,将数据输送至转速表,转速表通过直流电机调速器对电机速度进行动态调控,以实现电动排肥、排种以及车速与排种同步。种肥监测报警系统接通后,种肥传感器监测种肥管内的堵塞或者漏播情况,如有异常,传感器将异常信号由微处理器处理并有显示器灯光闪烁和警报器警鸣提示操作人员停车检查机具。
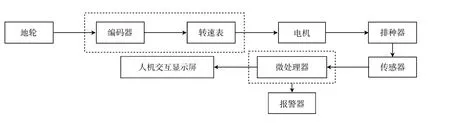
图2 2BMS-14 小麦智能施肥播种机工作原理图Fig.2 Working principle diagram of 2BMS-14 wheat intelligent fertilizer seeder
1.3 智能控制系统
通过分析小麦播种机的运动关系,建立各运动部件之间的数学模型,设计并优化智能控制系统框架,确定调整的参数和监测数据。在数学模型建立的基础上,选用嵌入式单片机控制技术、伺服控制技术及数据采集技术等自动控制理论,设计制作播种机的控制系统。电控技术为模块化设计提供了便利条件,把播种单元模块化,并重点设计模块之间的连接方案,实现搭积木式的整机组成方案。建立播种模块的数学模型并进行动力学分析,结合实地试验以修正模型参数,建立大型播种机与动力平台(或拖拉机)之间的匹配关系数据库,使播种机与动力平台(或拖拉机)达到最优配置。

图3 2BMS-14 小麦智能施肥播种机智能控制系统框架结构Fig.3 Frame structure of intelligent control system for 2BMS-14 wheat intelligent fertilizer seeder
2 主要工作部件的设计
2.1 传感器的选择与设计
该机具所用传感器类型较多,其中施肥传感器和播种传感器均为漏播监测传感器。基于红外光电线传感器原理,将种肥降落通过传感器时作为一个信号传递给微处理器处理,如遇种肥堵塞,红外信号一直受种子遮挡的影响,接受红外信号端的输出端电压一直处于增大状态,信号异常,监测装置报警。

图4 测速编码器安装结构图Fig.4 Installation diagram of speed measuring encoder
安装于地轮末端的编码器属于测速传感器。编码器与地轮轴同轴,通过计算每秒编码器输出脉冲的个数测得地轮转速,测速编码器结构如图4 所示。安装方法:编码器安放于保护套内,数据线在引出口引出与控制系统连接,编码器转轴通过连接器、测速轴套与测速轴连接,测速轴套与测速轴用6 mm(宽度)×6 mm(高度)×22 mm(长度) 的平键联接,测速轴套与内孔为六棱孔的六棱形连接器联接。此结构安装方便,与测速轴同轴度高,采集速度准确,保护编码器不受碰撞的同时还防止尘土对信号的干扰。
2.2 播种施肥电机的选择[2]
依据外接电源的情况,电机电压选择12 V,电机功率与扭矩则通过计算得到:

式中,T—电机扭矩(Nm);P—电机功率(kW);n—电机转速(r/min)。
由于电机安装采用六棱轴与排种器/排肥器直接连接,因此其转速相同,排种器/排肥器转速一般在0~60 r/min 可调。
P=Fν
式中,F—力(N);ν—机具前进速度(m/S)。
机具在作业时作业速度一般为4~6 km/h,测得单行作业的力为25 N,机具作业行数为14 行,通过计算可得功率为584.5 W,扭矩为93 Nm。因此,所选电机功率600 W,直流电压12 V,扭矩100 Nm。
3 2BMS-14 小麦智能施肥播种机的田间应用效果
2BMS-14 小麦智能施肥播种机的田间应用效果试验分漏播/堵塞监测试验和智能控制播种/施肥精确度试验2 项内容进行。机具试验区位于石家庄市藁城区马庄村,试验面积0.51 hm2,矩形,地块规整,土壤肥力中等,种植作物为小麦。试验区内有机井1 眼,紧邻试验地南侧。另在机井内安装有1.8 kW、扬程12 m、流量40 m3/h、3 寸口径的潜水泵1 台。2017 年10 月11 日播种小麦,南北向种植。
3.1 漏播/堵塞监测试验[1,6~15]
试验方法。机具往返作业1 次,采取人为方式制造漏播/堵塞故障,人工检查漏播断带与漏播次数的重叠性。为验证不同作业速度下机具的监测情况,分别在3.5 km/h 和5.0 km/h 作业速度下,均进行不同故障次数的监测作业5 次。
作业效果(表1) 显示,2 种不同作业速度下,机具漏播/堵塞监测报警次数的相对误差为0~16.6%,准确率≥83.4%。机具漏播/堵塞监测准确率高,作业速度对监测结果影响不大。进一步对机具漏报警的原因进行分析发现,试验中的漏播/堵塞监测漏报警情况属于漏播/堵塞时间短,未拥堵至漏播/堵塞监测装置的感应位置。这种漏报警情况可以通过调整漏播/堵塞监测装置的位置来解决。
3.2 智能控制播种/施肥精确度试验[16-20]
试验方法。利用千粒重不同的5 个小麦品种和颗粒大小不同的5 种化肥,进行5 组种肥精确度田间试验(表2)。机具作业速度为4 km/h;相同结构的外槽轮排种器与外槽轮排肥器,其均由智能控制系统控制工作,排种器与排肥器工作长度均调至最大状态,外槽轮排种器与外槽轮排肥器下端分别用袋子包裹种肥口;播种试验测试距离为317 m,作业幅宽为2.1 m。在播种试验前先通过智能控制系统预设种肥的单位面积播量,试验后通过称取排出的种肥总质量推算出实际的单位面积播量,通过实际值与预设值的误差确定精确度。
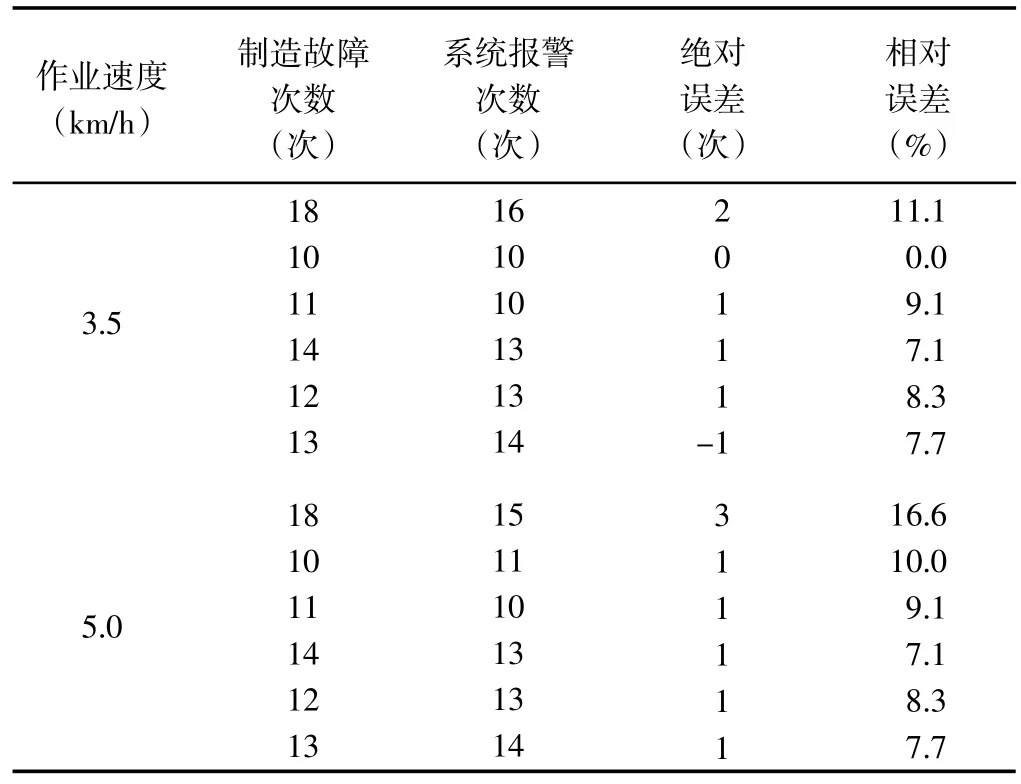
表1 漏播/堵塞监测试验结果Table 1 Results of missing sowing/blocking monitoring tests

表2 试验小麦品种及其所施化肥种类与养分含量Table 2 Wheat varieties tested and types of chemical fertilizers and nutrient contents
作业效果(表3)显示,机具播种量精确度误差为1.5%~2.2%、施肥量精确度误差为2.2%~3.1%,且播种量和施肥量均大于其理论预设值。分析原因发现,田间机具作业时震动是造成播种量和施肥量增大的主要原因,其次就是外槽轮排种器与外槽轮排肥器自身精度导致。
与普通小麦播种机转动地轮圈数推算单位面积播量,通过机械传动排肥播种相比,2BMS-14 小麦智能施肥播种机采用智能控制系统控制播种量和施肥量的精度均高于普通机械传动小麦播种机,平均节约麦种15.0 kg/hm2、化肥31.5 kg/hm2,约降低种植成本 375 元/hm2。
4 结论与讨论
研制的2BMS-14 小麦智能施肥播种机采用智能控制系统控制播种量和施肥量,精确度高,减少种植人员对种肥量的测算,降低劳动强度低,可对小麦播种作业进行全过程监测,减少因漏播/堵塞造成小麦缺苗断垄现象的产生,提高作业质量;而且,该机具结构简单,减少链传动,可节约动力消耗。

表3 智能控制播种/施肥精确度试验结果Table 3 Results of precision of saving or fertilizing with intelligent control
本研究条件下,2BMS-14 小麦智能施肥播种机播种均不影响小麦出苗。但该机具由于监测报警装置安装位置造成漏播/堵塞监测误差较大,外槽轮排种器与外槽轮排肥器精度差是导致施肥量和播种量精确度有误差的原因之一,结构有待进一步改进。
