一种多功能越障轮椅的结构设计与仿真分析*
2020-08-26黎铸新唐国源
田 英, 佘 阳,黎铸新,唐国源
(1.佛山科学技术学院机电工程学院,广东佛山 528000;2.工业和信息化部电子第五研究所,广州 510640)
0 引言
随着全球老龄化加剧、卒中发病率居高不下、交通事故不断增多等原因,现今社会对轮椅需求量不断增大。据中国残疾人联合会公布的调查显示,2010 年末我国肢体伤残2 472 万人,约占总人口的1.8%,其中需要使用轮椅的人数很多。然而除了医院之外的公共场合很少看到有人使用轮椅,主要是受目前的轮椅功能的限制,普通轮椅遇到台阶等障碍物无法跨越,很大程度限制了使用者的活动空间。
目前,国内外已有的越障碍轮椅有轮组式、步行式和履带式3种基本类型[1]。轮组式电动轮椅具有由1对或2对轮组构成的星形轮系,轮系上的小轮既可以绕各自的轴线自转,也可以随杆一起绕中心轴公转[2],具有运动速度快和能量利用率高等优点,但在上下楼梯过程中重心起伏较大,使乘坐者感到不适;步行式电动轮椅对不同尺寸的楼梯有较好的适应性,但其结构非常复杂,运动速度缓慢、对控制的要求较高[3];履带式电动轮椅在上下台阶过程中重心始终沿着与台阶沿连线平行的直线运动,所以运动平稳、波动小,对不同尺寸的楼梯也有一定的适应性[4],但在平地运动时由于阻力较大,能量消耗高,也没有在日常生活中得到广泛运用。近几年,基于上述3种基本形式的复合电动轮椅也涌现,主要有轮-腿复合电动轮椅[5]和轮-履复合电动轮椅[6-8],其中,轮子用于平地高效移动,机械腿和履带用于越障和上下楼梯。然而,轮-腿复合电动轮椅存在驱动系统比较复杂和上下楼梯过程中乘坐者的重心太高的问题,轮-履复合电动轮椅虽结构紧凑且重心比较低,但存在体型过大、重,机构复杂或者价格昂贵等问题,在市面的使用率很低,而且这些高性能的智能轮椅供应商大多集中于欧美发达国家,价格昂贵,国内大多数残疾人难以支付[9]。因此本文研制一款结构可靠、轻便又价格相对适中的越障碍轮椅,不仅为下肢有残疾的人或者老年人提供优良和安全的代步工具,拓宽活动空间,也可以提高他们的生活质量。
1 总体结构设计
本轮椅主要由4 组电动推杆和3 组车轮组成,2 个前轮为万向轮,2个后轮为驱动轮,由2个电机驱动,正常行走时前轮和后轮着地,中轮收起,只有在座椅升高和越障时中轮才着地,根据此设计,基于FUSION 软件建立了轮椅的三维模型,如图1所示。轮椅正常行驶时,主要依靠前轮和后轮承受重力,液压推杆组2伸长、推杆组4缩短,以达到后轮后移的目的,使重心后移,确保了行驶时的稳定性。当轮椅要实现越障或升高功能时,控制系统通过控制推杆组1、2、3、4的伸长量,以调节轮子的角度和高度,使轮椅达到所需的高度并处于稳定的状态。此外,中轮和后轮采用无刷电机作为动力驱动,能有效地提高轮椅使用寿命和减少行驶时产生的噪声。
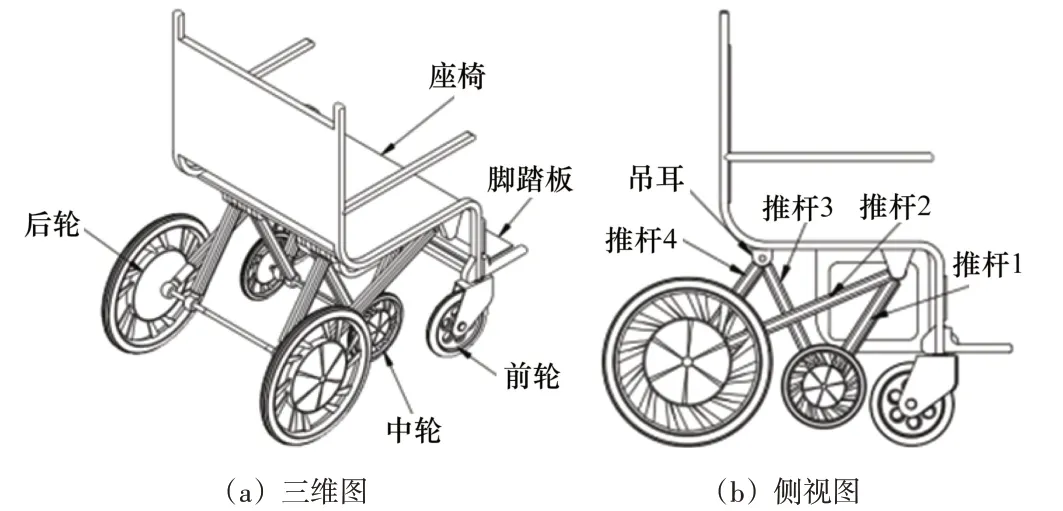
图1 轮椅的三维模型
轮椅的关键参数如下:
(1)驱动电机(轮毂电机)功率,单侧300 W 共600 W,电机额定电压为24 V;
(2)电池总容量1 480 W·h,估计续航20 km;
(3)4组推杆功率共30 W×8;
(4)控制系统为单片机,遥杆控制;
(5)座椅高度520 mm,座板宽540 mm,深度500 mm,靠背高度700 mm,可调靠背角度;
(6)主体材质为25号钢。
2 轮椅越障功能的实现
2.1 轮椅越障工作原理
轮椅通过红外线测距传感器测量障碍物的高度,控制系统再对推杆的长度进行调节,以改变中、后轮的位置,以此方式实现越障功能,在FUSION软件中,根据三维模型建立了轮椅的越障过程的运动模型,如图2 所示。其中图2(a)所示为当轮椅将要靠近障碍物时,中轮推杆组1、3伸长至中轮触碰地面后,中轮和后轮的相对应的4组推杆同时伸长,前轮离地,轮椅整体升高,如图2(b)所示,与此同时,轮椅继续向前行驶至前轮置于障碍物上后,通过控制中轮推杆组1、3的收缩,使中轮与前轮位于同一水平面,当轮椅前进至图2(c)所示位置时,后轮推杆收缩,并收缩至和前轮在同一水平面,如图2(d)所示。如此循环工作,最终实现轮椅越障。
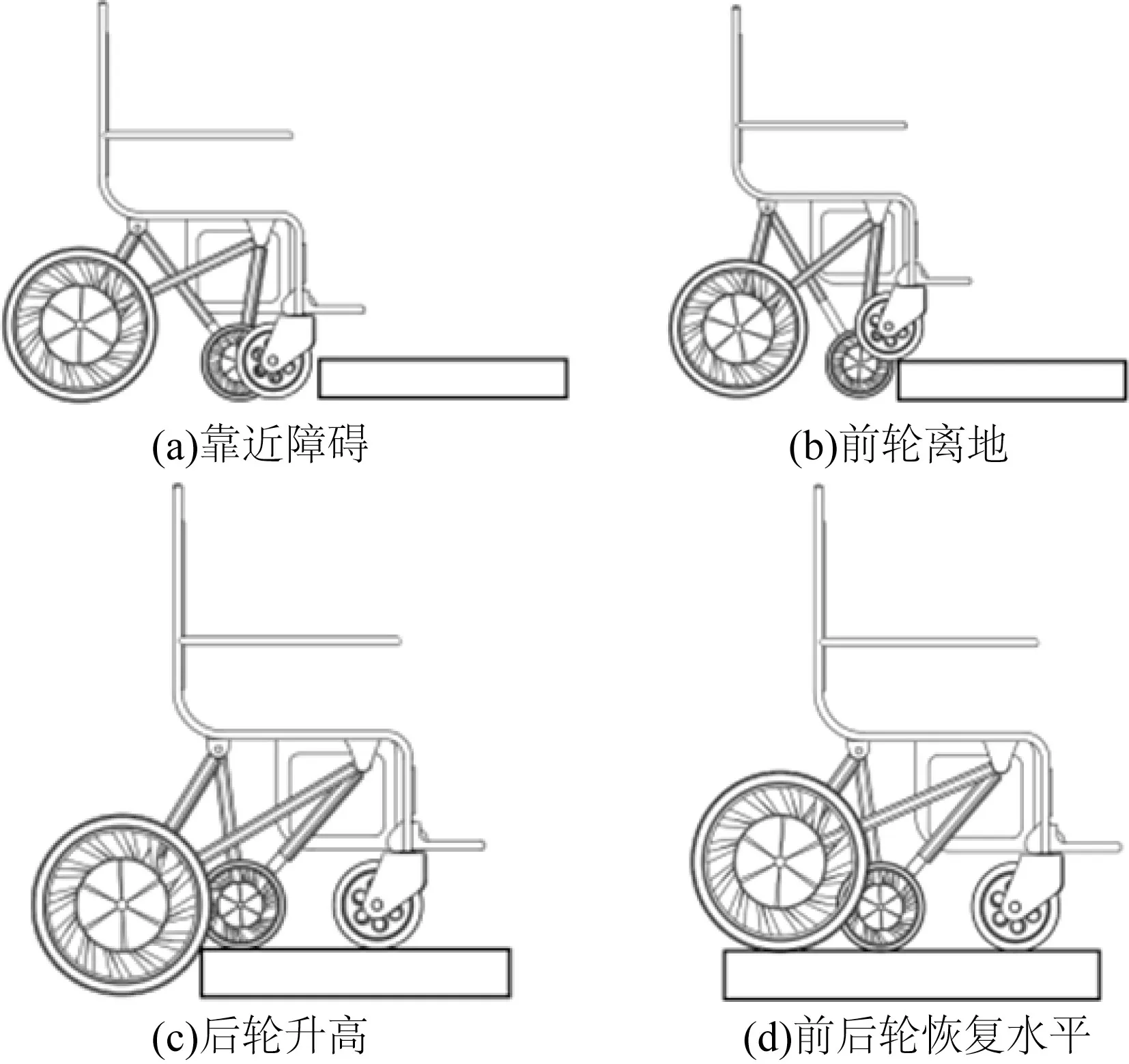
图2 轮椅越障过程模型
2.2 控制系统
根据其功能主要分成信息收集、信息转换、信息输出3个模块。
(1)信息收集:信息来源由红外线传感和控制手柄两部分构成。轮椅进行智能越障时由红外线测距传感器把收集到的信号传递至主控系统;轮椅需要实现升高等特殊指令时由控制手柄传输相应信号。
(2)信息转换:主控系统把收集到的信号进行翻译,计算推杆的伸长量,转化为输出信号。
(3)信号输出:控制系统把信号输出至推杆,实现推杆长度的调控。
3 轮椅结构设计与仿真分析
3.1 轮椅整体受力分析
轮椅在水平地面行驶时,轮椅自身重量以及人的体重均由前后4个轮承担,现对其机械结构进行受力分析。假设人的体重为120 kg,载荷平均分布在座椅上,主体材质选择25 号钢,基于ANSYS分析其产生的应力大小及形变量,来校核轮椅的强度和刚度,保证轮椅能够正常工作[10]。其应力分布和形变由图3所示,轮椅整车应力最大的地方为推杆跟底部连接杆的位置,最大应力为78.2 MPa,远小于材料的许用应力450 MPa,则该结构的强度满足其条件。在外部载荷作用下,形变最大的为座椅扶手,最大形变量为0.022 mm,对该结构影响不大,满足刚度条件。
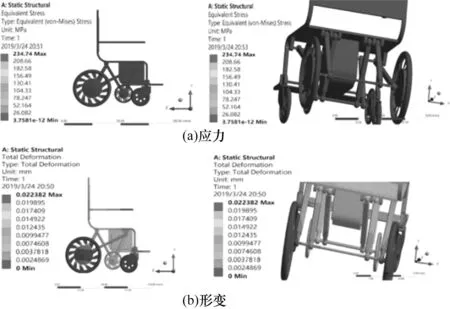
图3 轮椅的整体受力分析
3.2 推杆受力分析
由轮椅的整体受力分析可知轮椅在升高情况下推杆4的受力情况最严重,因此对推杆4单独进行受力分析,推杆4的行程为300 mm,材料为25号钢,此时推杆的伸长量为200 mm,推杆4的受力分析图如图4所示,由图4(a)可知,推杆所受最大应力值为87.42 MPa,远小于材料的许用应力450 MPa;由图4(b)可知,推杆的最大形变量为0.000 5 mm,变形非常微小,不影响正常工作。因此推杆设计满足要求。
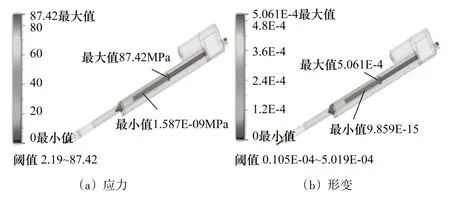
图4 推杆4的受力分析
3.3 轮椅转向性能分析
本设计采用差速转向的方式实现轮椅的转向控制。其前后轮轴距较长并带有机械转向系统,由于轴距较长,在上下坡、制动或加速时,不容易前后倾翻,比较适合户外的复杂环境。轮椅的后轮为驱动轮,驱动轮由直流电机通过减速器驱动,驱动电机既是动力源又可通过左右轮差速的方式实现轮椅转向,电机额定功率为300 W,额定电压为24 V,额定转速3 000 r/min,减速比为9.78。
图5 所示为轮椅的简化转向模型。假定驱动车轮相对于地面只做纯滚动。令v 为电动轮椅车质心的瞬时线速度, Ω为横摆角速度,vr、vl分别为左、右轮线速度,D为驱动轮的轮距,由轮椅的运动分析可知:

令智能轮椅的转弯半径为R,则有:

综上可知,轮椅可通过控制手柄摇摆角度来控制智能轮椅左右两个驱动轮的转向,实现轮椅的转向运动。
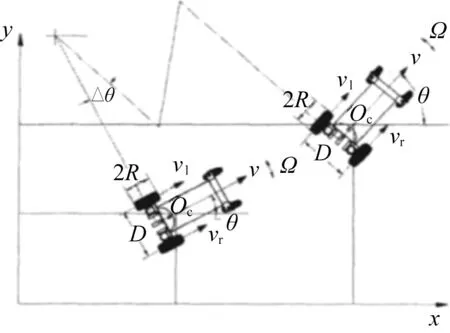
图5 转向运动模型
3.4 轮椅升高性能分析
智能轮椅的升降是通过4 组推杆的配合伸缩实现的。推杆组1与推杆组4随着其余两杆运动而运动,主要起加大支撑力的作用。就运动而言,通过推杆组2与推杆组3的配合即可实现轮椅的升降,所以只需对推杆组2与推杆组3进行分析即可。当轮椅进行最基本的升降运动时,使用者无需自行调节速度,推杆将会按照系统设定好的速度进行伸缩。
将轮椅上升的速度设置为匀速45 mm/s,此速度既不会太慢,也不会因为过快而导致使用者感到不适。根据此速度3.5 s即可将轮椅上升至越障状态,此时前轮距离地面157.5 mm,根据推杆其空间结构分布情况,推杆组3 的推出速度应为50.33 mm/s,推杆组2 的推出速度为105.7 mm/s。推出速度均为匀速运动,启动与停止时会产生一定的刚性冲击,但对推杆的使用寿命与使用者乘坐舒适性的影响很小,可以忽略不计。
为了更好地表达出推杆与轮椅座椅的运动关系,令z为轮椅上升高度,x为推杆2 推出位移,y为推杆3 推出位移,t为推杆运动时间,通过Matlab 对数据拟合后,得出关系式:

最后在Adams 中进行运动仿真,发现轮椅在升降过程中未发生干涉问题,验证了该轮椅机构设计合理性与运动安全性。
3.5 座椅角度调节机构
研究表明,具备座椅和靠背倾斜功能的轮椅通过调整角度可以缓解使用者的疲劳,置于特定角度有助于减小接触压力,从而避免皮肤溃烂[11]。除了满足压力缓解外,角度可调的轮椅车可以提升使用舒适度[12]。因此,本轮椅还设置了座椅角度调节装置,如图6所示,其主要由一个扇形齿板、一个棘轮锁紧机构和定位凸轮、手柄及扇形齿轮联接的椅背安装板组成。该机构工作时靠手柄联动凸轮打开棘轮锁紧使扇形齿板能自由运动,合上手柄和凸轮就卡死了扇形齿板锁定角度。使座椅角度可自由、快速调整。
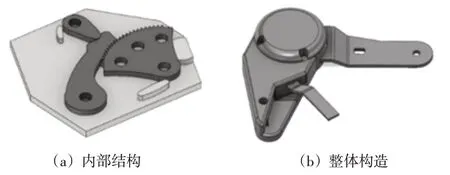
图6 座椅角度调节机构
3.6 轮椅的爬坡与侧倾能力的分析
3.6.1 爬坡度计算
当轮椅上坡行驶时,设轮椅和人的总质量G=150 kg,Fs为驱动力,f为滚动摩擦力,Fn为支撑力,α 为爬坡角度。轮椅上坡时所受的阻力为坡道阻力(Gsin α)与滚动摩擦力之和,表示为:

式中:μ为滚动阻力,一般取0.02。
电机的功率P=300 W,机械传动效率η=0.8,轮椅的平均速度1.8 m/s,后轮半径R=0.18 m,根据公式:

可得出当轮椅匀速上坡时,其牵引力为Fs=740 N ,根据牛顿第三定律,将驱动力和道路阻力平衡,即:

利用Matlab 里的fsolve 函数计算得出α=29.07°,即轮椅理想爬坡极限为29.07°
3.6.2 最大侧倾角的计算
本智能轮椅的红外测距系统除了可以测定前方障碍物的距离外,也可以测定轮椅的侧倾角度。红外线传感器安装在座位下方的位置,通过对传感器的信息采集实现实时监测轮椅的侧倾情况。当侧倾角即将超过极限角度时,系统会发出警示信息提醒使用者。当轮椅超出极限侧倾角,即轮椅倾倒时,其他人也可以通过终端显示器观察到其情况,可以及时地帮助倾倒的乘坐者。
侧倾极限角可通过力学原理,在简化的模型上计算出其理论值,轮椅的侧翻简化示意图如图7所示。
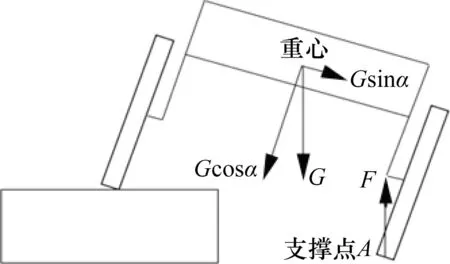
图7 轮椅侧翻示意图
设人与轮椅的重量之和为120 kg,在忽略人体重心偏移的情况下,经Adams 模拟测出轮椅水平时,人和轮椅总体的重心高度a=526 mm,位于轮椅对称的中间位置。经实际测量,本轮椅两个后轮之间的距离的一半b=268 mm。
假设轮椅的侧倾角为α,轮椅处于倾翻的临界状态,根据简化图与力学原理可知:

利用Matlab 里的fsolve 函数计算得到α=27°,即轮椅发生侧翻的极限角度为27°。
4 实物样机试制与测试
为了检验该轮椅的功能和性能,试制了实物样机,设计了智能轮椅的电控系统和相关的电子器件,通过焊接组装后的轮椅实物图如图8所示。
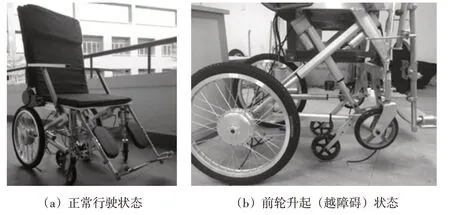
图8 越障轮椅实物样机
智能轮椅的最大行驶速度采用速度计测量为5.45 km/h,小于6 km/h,满足GB/T 12996-1991[13]要求。利用砝码模拟人的质量检测承载能力,利用斜度可调的铁板检测爬坡和侧倾,但是为了使轮椅不致呈现破坏性试验,轮椅的承载能力、爬坡和侧倾试验分别做到100 kg、18°(国标爬坡角度大于或等于9°)、18°,测试结果表明,所设计的实物样机完全满足功能和性能要求,实现了预期目标。
5 结束语
(1)设计了具有一款具有移动功能、越障功能、升降功能、靠背角度可调节、爬坡的多功能电动轮椅,设计了相应的执行机构和满足人机工程学的轮椅尺寸。
(2)利用ANSYS对推杆结构的原理及约束条件分析,结合人体重量,材料种类及性能等实际设计要求,做出了轮椅整车的受力分析,保证了轮椅在各种功能下结构强度和刚度要求。
(3)利用ADAMS对推杆的伸缩情况进行分析,结合推杆的运行速度,得出推杆的运动关系式,验证了轮椅结构的合理性与运动安全性。
