基于MATLAB的倒立摆模糊自适应PID控制研究
2020-08-25王立红谢忠刚王玉莹
王立红,谢忠刚,王玉莹
(1.辽宁工业大学 电气工程学院,辽宁 锦州 121001;2.鞍钢集团矿业弓长岭有限公司 选矿分公司,辽宁 辽阳 111008;3.鞍钢集团矿业有限公司 教育培训中心,辽宁 鞍山 114000)
0 引言
PID控制是古典控制理论中被广泛采用的控制规律,主要应用于各种线性系统,它的控制精度由被控对象的模型精度决定[1]。在倒立摆系统中,存在一定的非线性和不确定性等因素,导致传统的控制方法具有一定的局限性。模糊控制是一种采用语言控制规则的方法,不需要建立被控对象精确的数学模型,凭借现场操作人员的经验或相关专家的知识,使得设计更加简单[2]。本文将传统PID控制和模糊控制相结合,根据PID控制器的三个参数(比例系数KP、积分系数KI、微分系数KD)与偏差e和偏差变化率ec之间的模糊关系,在运行过程中不断修改KP、KI、KD,让PID参数具有自适应能力,构成模糊自适应PID控制器,并利用MATLAB进行仿真,仿真结果表明本文采用的方法能有效控制摆杆的角度。
1 一级倒立摆的数学模型
1.1 一级倒立摆控制原理
图1为直线一级倒立摆工作原理框图。数据采集卡将采集到的旋转编码器的数据传送给计算机,并与设定值进行比较,将偏差经过某种运算之后发出控制规律,控制电机使摆杆左右摆动进入稳摆范围,从而实现摆杆直立不倒以及自摆起。

图1 直线一级倒立摆工作原理框图
1.2 倒立摆的传递函数
在忽略空气阻力和各种摩擦的条件下,直线一级倒立摆可以看作是由小车和匀质杆组成的系统[3]。现做如下假设:小车质量为M,摆杆质量为m,小车与接触面的摩擦因数为f,摆杆转动轴心到杆质心的长度为l,摆杆的转动惯量为I,施加在小车上的作用力为F,小车位移为x,摆杆与垂直向上方向的夹角为Φ,摆杆与垂直向下方向的夹角为θ。采用牛顿-欧拉法建立倒立摆数学模型的过程如下:

(1)
(2)
对于质量均匀分布的摆杆,系统的传递函数为:
(3)
其中:g为重力加速度。
2 模糊PID控制器设计
模糊控制器采用二维模糊控制器,输入变量为误差e和误差变化率ec,经模糊化后变成模糊量E和EC,经过模糊推理和模糊决策后得到模糊输出量U,再经过清晰化后得到精确的输出量u,也就是PID控制器的参数KP、KI、KD。模糊自适应PID控制原理如图2所示。其中,r为输入,y为输出,αe、αc分别为误差、误差变化率的量化因子,αu为输出量的比例因子。一般情况下,αe越大,系统的超调量越大,过渡过程就越长,反之,系统变化越慢,稳态精度降低;αc越大,系统输出变化率越小,系统变化越慢,αc越小,系统反应越快,但超调量增大;αu越小,系统过渡过程越长,αu过大,会导致系统振荡。

If E=PB and EC=NB then U=ZO
If E=PB and EC=NM then U=NS
If E=PB and EC=NS then U=NS
If E=PB and EC=ZO then U=NM
If E=PB and EC=PS then U=NM
If E=PB and EC=PM then U=NB
If E=PB and EC=PB then U=NB
由此可以建立完整的模糊控制规则表,本文不再详述。

图2 模糊自适应PID控制原理图
3 仿真分析
本实验一级倒立摆的物理参数如下:小车质量M=0.618 kg,摆杆质量m=0.073 7 kg,摆杆长度L=350 mm,摆杆质心到转轴的距离l=122.5 mm。将数值代入公式(3)中得到此时的传递函数为:
采用PID控制,建立系统的仿真模型,如图3所示。在5 s时加入阶跃扰动,仿真波形如图4所示。

图3 PID控制仿真模型
由图4可以看出:采用PID控制,系统的输出会产生较大的超调,受扰动后输出波动较大,但最后能够恢复到稳态无静差。
建立模糊自适应PID控制器仿真模型,如图5所示,在5 s时加入阶跃扰动,仿真波形如图6所示。
由图6可以看出:采用模糊PID控制后,系统的输出曲线变得光滑,超调量明显减小,受扰动后输出波动变化不大,系统性能有所提高。
4 结论
本文将模糊控制和传统的PID控制相结合,设计了模糊自适应PID控制器,作为一级倒立摆的控制器;根据摆杆角度与竖直方向的偏差和偏差变化率,通过模糊推理,在线修改PID控制器的参数KP、KI、KD。仿真结果表明:模糊PID控制能有效改善系统的动态性能,同时提高系统的抗扰性。
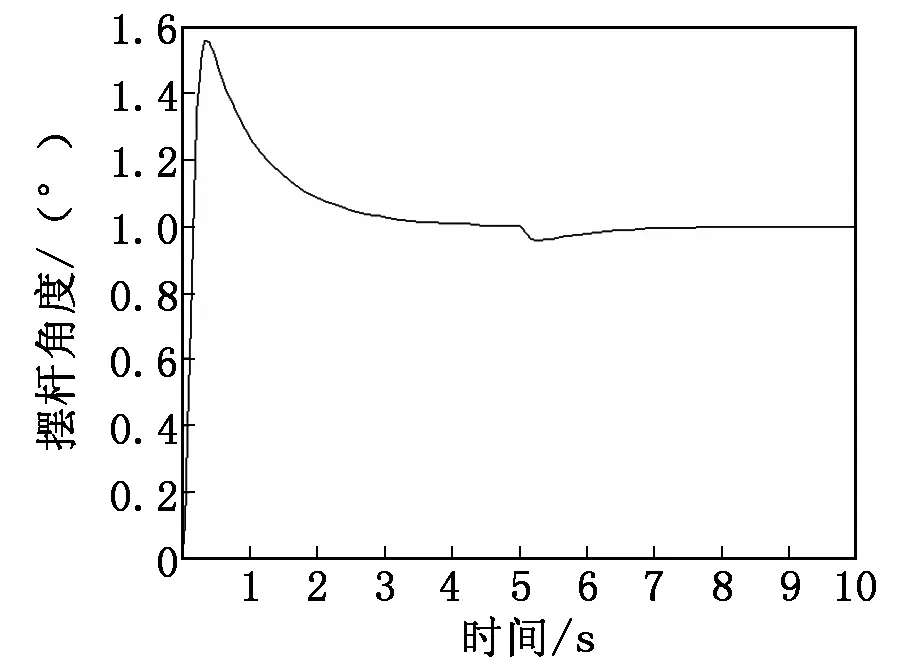
图4 PID控制摆杆角度曲线

图5 模糊自适应PID控制器仿真模型
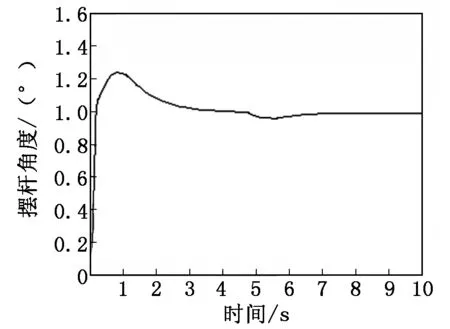
图6 模糊自适应PID控制摆杆角度曲线
