一种采摘机器人的设计
2020-08-25冷俊男陈毅豪
冷俊男 陈毅豪
(西北农林科技大学,陕西 杨凌 712100)
1 一种采摘机器人结构组成
包括行走底盘和设置在行走底盘上的采摘臂、收集装置和控制器;采摘臂的末端靠近机械爪的位置设置有摄像头;行走底盘包括底盘本体,底盘本体底部中央设置有识别路线的传感器,四角分别设置有麦克纳姆轮;麦克纳姆轮通过相应的直流电机、电机减震连接件与底盘本体之间还设置有减震弹簧;收集装置包括收集箱,至少一对摆杆和倾倒舵机,摆杆上端和收集箱连接,摆杆下端与倾倒舵机的输出轴连接,倾倒舵机固定在底盘本体上。
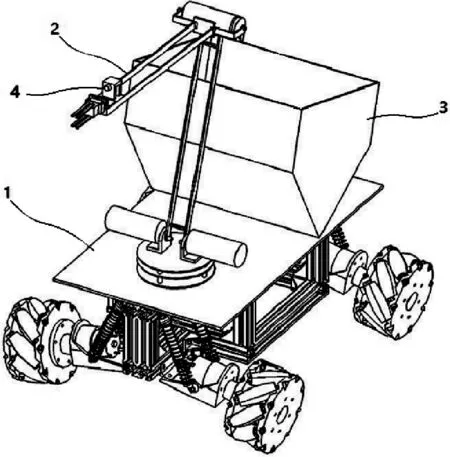
图1 采摘机器人立体结构图
收集箱是一上阔下窄的容纳箱,收集箱的一侧斜面与摆杆上端连接,收集箱的横截面是一五边形结构;采摘臂包括旋转底座、大臂、小臂和机械爪;旋转底座与底盘本体在水平面内转动连接且由底座舵机驱动,大臂通过大臂舵机与旋转底座俯仰转动连接,小臂通过小臂舵机与大臂俯仰转动连接,机械爪通过腕部舵机与所有小臂的末端转动连接,且机械爪由机械爪开合舵机驱动;底座舵机、大臂舵机、小臂舵机、腕部舵机、机械爪开合舵机与控制器连接。大臂和小臂均包括一对平行设置的臂杆。传感器是灰度传感器,传感器有多个,多个传感器呈矩形分布且通过传感器安装板设置在底盘本体底部。底盘本体是一框架结构,框架结构的上表设置有亚克力平板。
2 一种采摘机器人工作过程
本设计在工作时,当机器人的前排传感器或后排传感器识别到循迹线时,机器人发出信号,使得车轮驱动电机控制转速,使车轮驱动电机降低转速,直到中排传感器识别到地面标识时,机器人停止在地面标识上。
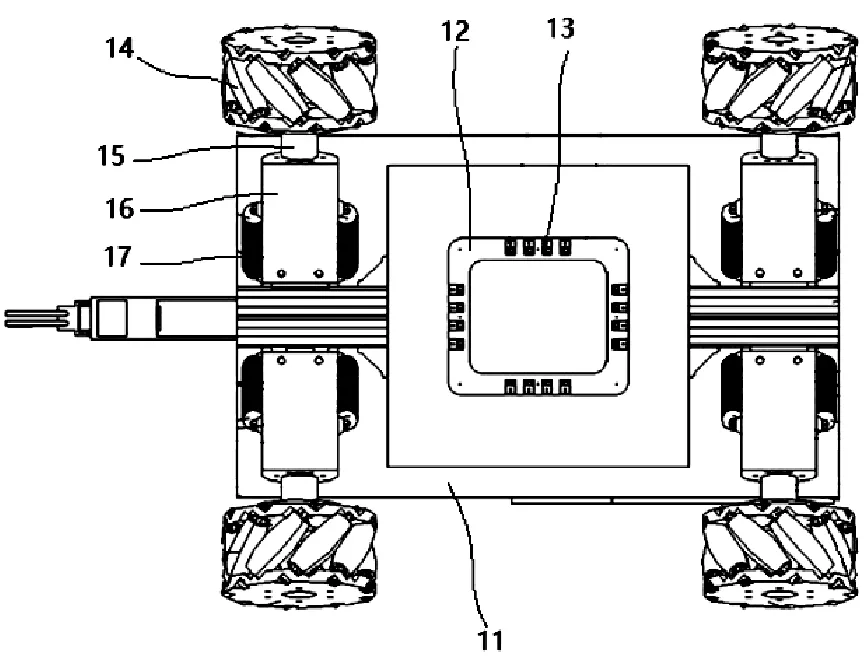
图2 采摘机器人俯视图
采摘臂的舵机会根据接收的信号,控制底部固定架旋转一定角度,驱动电机会根据接收的信号旋转一定角度,并控制臂杆转过一定的角度,当机械爪移动到果实所在位置时,摄像头会识别前方有无果实,如果有,会发出信号给舵机,控制机械爪将果实抓取,抓取果实之后,会发送信号给舵机、驱动电机,将物体送至收集箱。
在机器人不在卸载区时,舵机会锁死收集箱门,使其承受果实压力而紧闭,当达到卸载区时,机器人发出信号给舵机,让其转动,控制收集箱门打开,收集箱底部有一个从后部向前部倾斜的倾斜底板,使得卸载果实时,利用果实的自重,让其自然滑落。
本设计采用灰度传感器,能够准确识别路线;采用了舵机控制收集箱门,收集箱底部采用了倾斜底板,使得收集的物体自动卸载;采用摄像头视觉技术,可以准确识别目标处有无物体,使用方便,自动化程度高,可以代替人工进行长时间采摘工作,节省人力物力。
工作时,在采摘机器人移动过程中,传感器用于矫正采摘机器人在移动过程因麦克纳姆轮打滑所产生的偏差。当摄像头视界内出现成熟果蔬时,采摘机器人旋转,将目标果蔬移至摄像头视界中央,然后前进,直至目标果蔬阈值达到初始条件,采摘机器人行走底盘停止移动,采摘臂开始工作。
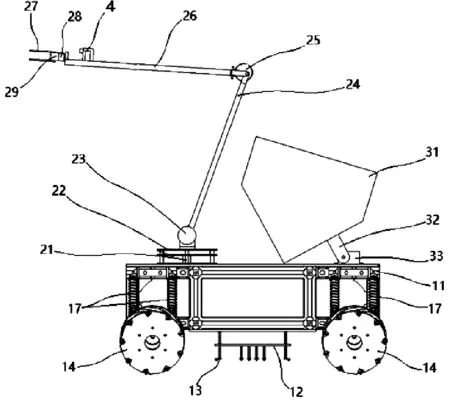
图3 采摘机器人侧视图
当采摘臂末端的摄像头寻找到成熟果蔬后,大臂舵机、小臂舵机、腕部舵机工作,带动大臂、小臂动作,使机械爪靠近目标蔬果,在摄像头世界内目标蔬果像素点达到阈值时,说明机械爪已经能够抓取到目标蔬果,机械爪开合舵机动作,机械爪抓取到目标果实,底座舵机、大臂舵机、小臂舵机、腕部舵机旋转至固定角度,将蔬果放至收集箱中,完成一次采摘。
3 结语
本设计是一种基于独立悬挂式麦克纳姆轮和机器视觉的采摘机器人,麦克纳姆轮可以实现采摘机器人的全向移动,保证了各个麦克纳姆轮的完全接地,摄像头用于识别可采摘蔬果;在具体应用过程中,可以实现地面果蔬的抓取、采摘并收集、倾倒,节省人力,降低生产成本,提高劳动效率。这种采摘机器人可以替代一些农业、林业的人工采摘。
