浅谈光学系统在高精度倒装焊机中的应用
2020-08-20狄希远
狄希远,闫 瑛,景 灏
(中国电子科技集团公司第二研究所,山西 太原 030024)
0 引言
倒装焊接设备主要用于大规模集成电路器件制造的倒装焊接工艺,完成芯片与基板的直接互连,使封装具有更优越的高频、低延迟、低串扰的电路特性,能有效提高电路、部件或系统的组装互连的可靠性。高精度倒装焊接机主要用于红外探测器的研制与生产。红外探测器组件促进了红外技术应用的发展,促使红外武器装备性能大幅提高,广泛应用于侦察、监视、精确制导、搜索跟踪和光电对抗等军事系统,成为先进光电武器系统的重要组成部分,同时在驾驶辅助、消防、安保、安全生产等民用领域也有广泛应用前景[1]。
随着红外探测器向第三代红外焦平面技术方向发展,基于激光调平的倒装焊设备成为红外探测器核心工艺设备。像元尺寸的变小对探测器芯片倒装互连是一项巨大挑战。采用具备激光调平功能的倒装互连设备完成高精度互连,通过光学系统识别位于探测器芯片、读出电路上特定位置处的对准标记,实现高精度的自动对准,降低倒装焊接机对准时的误差,提高了对准精度,从而提升互连导通率。电路基板与芯片的面与面平行是实现精确对位的基础,本文主要介绍了光学系统的结构和实现精确对位、调平的功能。
1 光学系统的结构组成
光学系统由准直光路系统、成像光路系统和激光测距调平光路系统组成,光学原理如图1所示,光学系统结构如图2所示。

图1 光学准直与激光测距原理图
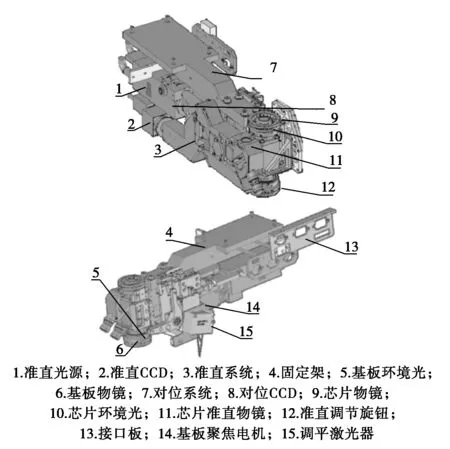
图2 光学系统结构
1.1 准直光路系统
准直光路系统采用了双光路共CCD的结构,避免了多相机相互间标定的误差,也减小了硬件系统的复杂度;对分光棱镜复用来实现同轴照明,相比于常用的机器视觉项目在物镜的前端附加专用的同轴照明光源,不仅可以避免占用空间而减小工作距离(显微物镜前的工作距离都比较小,很难有合适的同轴光源能够在其工作空间插入),而且一定程度上加大了光源照射的数值孔径,有利于增大物镜分辨能力,明显简化了硬件结构。
使用准直光路时,一亮十字光自动加到照明光路中,十字在芯片上的反射图像再同基板反射图像叠加传送到CCD,如果芯片和基板不平行,则在CCD上反馈回来的是两个十字光,通过驱动PR摇摆台,调节芯片十字光和基板十字光重合,完成芯片和基板的平行调节。如图3所示。
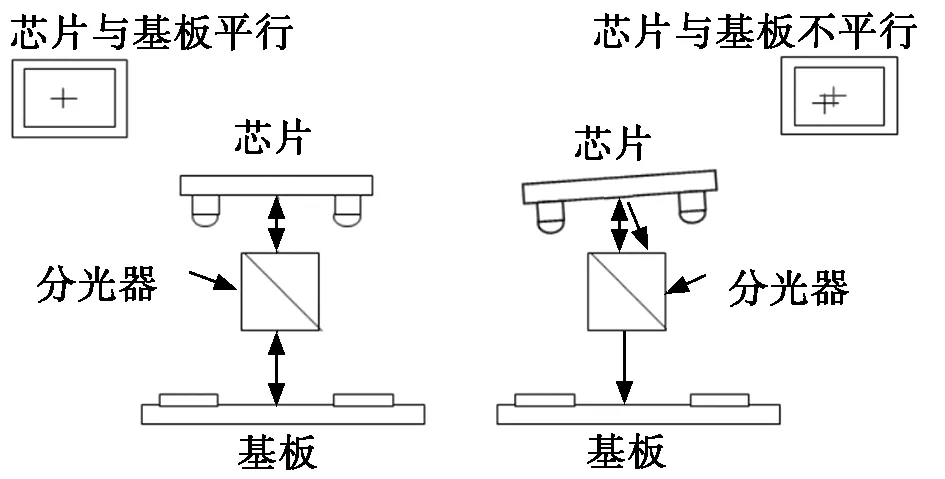
图3 准直检测示意图
1.2 成像光路系统
成像光路是由两个可互换的物镜安装在同一个垂直轴上,通过电机校准使这个垂直轴平行于热压焊头的垂直轴。芯片的图像与基板图像叠加后,并传送至CCD。
1.3 激光测距光路系统
激光测距的依据是三角测量法,三角测量法的原理是激光发射器通过镜头将可见红色激光射向被测物体表面,经物体反射的激光通过接收器镜头,被内部的CCD线性相机接收,根据不同的距离,CCD线性相机可以在不同的角度下“看见”这个光点。根据这个角度及已知的激光和相机之间的距离,数字信号处理器就能计算出传感器和被测物体之间的距离。原理如图4所示。
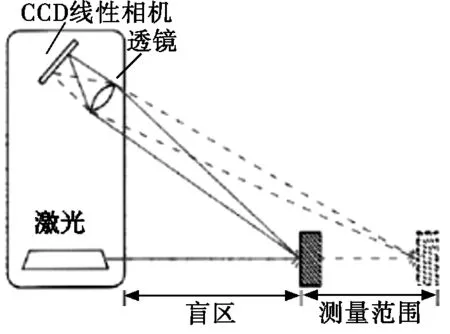
图4 激光三角测量原理
利用激光三角测量法原理的高精度激光测距传感器,最高分辨率可以达到0.03μm,最远检测距离可以达到5.4 mm。用三角测量法原理制成的传感器可应用于位移、厚度、高度、宽度、直线度和平面度等精度要求较高的检测中,面与面平行调节算法通过三角测量法原理进行测距,由算法得到两平面的平行度。
通过激光检测系统检测到的距离,测算芯片和基板的平行度值,驱动摇摆台对芯片和基板的平行度误差进行校正。
建立数学模型,已知三个不共线的点可以确定一个平面,当激光测距传感器在两个平面间取3个位置,测出3个位置间上下工作面的3个距离值Z1、Z2和Z3,将一个工作面作为基准面,两个平面的夹角可以转换为两平面的法向向量间的夹角,就可以计算两平面角度。以一个工作面为基准,调节另外一个工作面(按计算的角度旋转),直到两个工作面平行。
2 光学系统的精度
光学系统精度主要影响因素有CCD相机像元尺寸和光学系统的放大倍率。因此在合理设计光学系统的基础上,分析视觉系统精度的主要因素有视场大小和CCD相机分辨率等。CCD的分辨率越高,像元尺寸越小,精度就越高。图像的光学放大倍数越大,对于给定面积的元数就越多,所以精度就越高。已知视场大小为870μm×690μm,相机CCD分辨率4242×2830,光学放大倍数为10X,可得到视觉系统的精度为0.2μm。
基板与芯片图像自动对位算法如图5所示,移动光学系统到A位置,通过芯片和基板第一个角的模型找到芯片和基板的Mark点,并记录下它们的坐标;移动光学系统到B位置,通过芯片和基板第二个角的模型找到芯片和基板的Mark点,并记录下它们的坐标;分别以芯片的两个Mark点为中心,通过坐标点计算基板的Mark点的偏移量,并以此控制主工作台沿X,Y方向的移动和绕Z轴的移动,使两个Mark点在图像中的位置重合。

图5 芯片与基板MARK位置示意图
其中Mark坐标旋转位移为:
X2=cos(θ2)×R1=
Y2=sin(θ2)×R1=
对位软件设计时,要考虑设备的系统误差,并在系统软件中进行补偿。
3 结论
光学系统采用组合功能设计,将光学准直调平、显微成像以及激光调平等集于一体。利用光路成像及激光高精度测距等原理实现基板和芯片平行度检测和精确对位。该系统已成功应用于高精度倒装焊接机上,解决了芯片与基板精确对位的难题,同时也可扩展应用到类似两面精确对位的应用场合。
