基于UG 的纵向自动码垛机的设计
2020-08-18秦建国张旭东
秦建国,张旭东
(内蒙古工业大学机械工程学院,内蒙古,呼和浩特 010051)
目前,小型码垛普遍采用人工码垛方式,效率低、人工成本高、工作环境恶劣及安全生产隐患多等问题突出。本文通过设计一个码垛烘干一体机,将原来使用人工进行码垛的流程简化,减少人工的使用,实现自动化码垛过程,效率更高,可以降低产品生产的成本[1]。
1 码垛烘干一体机的设计
码垛机构是码垛烘干机最重要的结构之一,而设计实现码垛功能时,应该充分考虑理想的码垛效果,还需要考虑托盘的尺寸规格,托盘是物流产业中最为基本的集装单元和搬运器具[2]。
1.1 设计思路
产品在托盘上堆码的方式有4 种:重叠式、交错式、纵横式和旋转式,要求托盘表面的利用率不低于80%[3]。而具体码垛的方式则要根据产品的形状尺寸选定,产品单个尺寸的长宽高为595mm×595mm×95mm,如图1 所示,设计为垂直纵向码垛,10 个产品为一垛,总高 0.95m。
常见码垛机结构有关节机器人式、桥式、龙门式等[4]。机器人码垛结构一般是多轴结构组成,适合多种尺寸规格的产品进行码垛,但每次只能进行一个码垛,且码垛的速度不快;对于桥式、龙门式的码垛机机构,一般较少用于小型纸质产品的码垛。目前,大多数码垛装置都是针对于大尺寸、表面光滑的工件,末端采用普通吸盘或者特制的末端执行机构[5]。根据本产品的形状特点,本文设计了一种新型的纵向码垛机,可以实现逐个连续码垛。
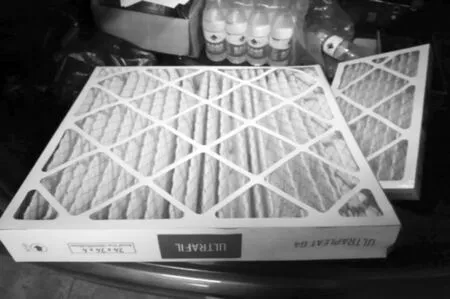
图1 产品包装成品图
1.2 码垛机的整体结构
码垛机的整体结构如图2 所示,图中1 为导杆气缸,通过导杆的伸缩带动连接的整型板横向运动;图中2 为整型板,在气缸的驱动下横向夹紧叠垛产品;图中3 为整体机架,由铝型材搭配构成;图中4 是推出平台,用于堆放码垛好的叠垛,图中5为转板装置,进行单向回转运动;图中6 为超越离合器,保证转板装置只能单向运动;图中7 是暖风机,通过电热提供暖风;图中8 是空气喷嘴,将暖风机的暖风排出;图中9 是普通气缸,在气动作用下使托盘纵向运动将单个产品依次推入转板装置中;图中10 是托盘;图中11 是无杆气缸,可以实现纵向运动,带动连接的推出板,将码垛完成的产品整垛推出;图中12 为推出板,进行纵向运动,将码垛好的产品推出码垛机;图中13 是直线导杆,其上的滑块与推出板相连,进行横向进给运动。
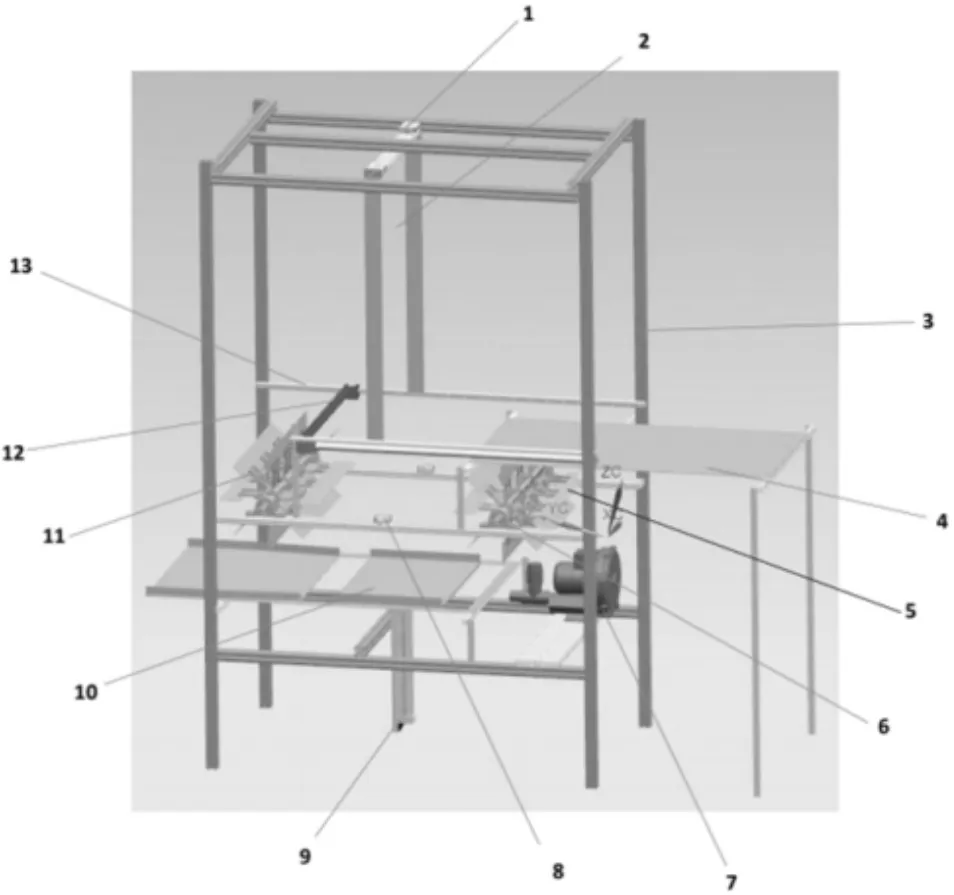
图2 码垛机主要结构图
1.3 码垛机的工作流程
(1)普通气缸开始向上运动,所连接的托盘以及托盘上的产品向上运动。
(2)上升中的产品上表面与转板的下表面相接触时,驱使转板向两侧旋转,当普通气缸的上行行程结束后,此时产品接触的挡板旋转达到45°位置,产品与挡板不再接触,此时产品下表面与挡板上表面接触。
(3)普通气缸开始下降行程,回到原始位置,由于转板只能单向旋转,此时产品在与托盘不相互接触时也会在转板上保持静止,不发生掉落,从而完成一次码垛的运动。
(4)在码垛同时,暖风机开始工作,将产生的暖风经过空气喷嘴输出,对纸盒烘干。
(5)经过若干次的码垛后,产品叠垛到达预先设计高度,此时整型装置的导杆气缸带动整型板进行纵向运动,对叠垛进行整齐,整齐后气缸回到初始位置。
(6)挺多无杆气缸连接的推出板将整齐后的叠垛沿推出平台推出,推出后,无杆气缸回到初始位置,完成一次完整的码垛烘干过程。
2 主要结构工作原理
2.1 转板结构原理
超越离合器具有改变速度、防止逆转、间歇运动的特点[6]。本设计的创新之处在于针对产品的特性设计了一种新型的转板结构,通过转板结构和单向超越离合器的功能可以实现纵向对产品的码垛。
2.2 推出装置原理
推出装置主要由无杆气缸带动推板,沿直线导轨进行往复运动,依靠摩擦力将整个产品的叠垛推出。本设计为2s 完成一次往复,通过无杆气缸上的行程开关设置相应的行程,为了保证在推出过程中叠垛不发生倒塌,需要对推出装置的运动特性进行分析。
3 码垛烘干一体机的动力学及有限元分析
3.1 转板结构的设计及有限元分析
因为转板承受一定的载荷,因此有必要对转板进行结构分析,确定转板的材料结构是否能到达到设计的标准,我们采用UG 中的有限元模块,对转板的主要受力结构长支撑板进行有限元分析。分析结果如图3 所示:

图3 转板静态受力变形图
3.2 有限元分析结论
由于转板是左右对称结构,我们对一侧的转板进行力的载荷的施加,施加载荷为60N,方向为竖直向下,在螺栓连接处施加固定约束,最大形变集中在支撑板连接处,约为0.077mm,整体变形非常微小,可以认为长支撑板的结构符合设计要求。
3.3 耐久性分析
转板在工作时,所承受的最大载荷也成周期性变化,每个周期T 是码垛一次完成的时间。
安全系数合理选择原则是:在安全可靠的情况下,尽可能选择较小的安全系数。根据经验数据法选取安全系数,如果材料性能数据可靠,载荷和应力计算准确,可取[S]=1.23~1.3[7],确定安全系数为1.3。对于塑性材料,当其达到屈服而发生显著的塑性变形时,即丧失了正常的工作能力,所以通常取屈服极限作为极限应力;支撑板材料使用塑性材料,在进行耐久性分析时,设置使用屈服极限。
综上所述,给有限元模型指派材料为Iron_40,周期T=60s,安全系数确定为1.3,设定循环的次数为100000 次,基于以上参数我们进行耐久性的分析。
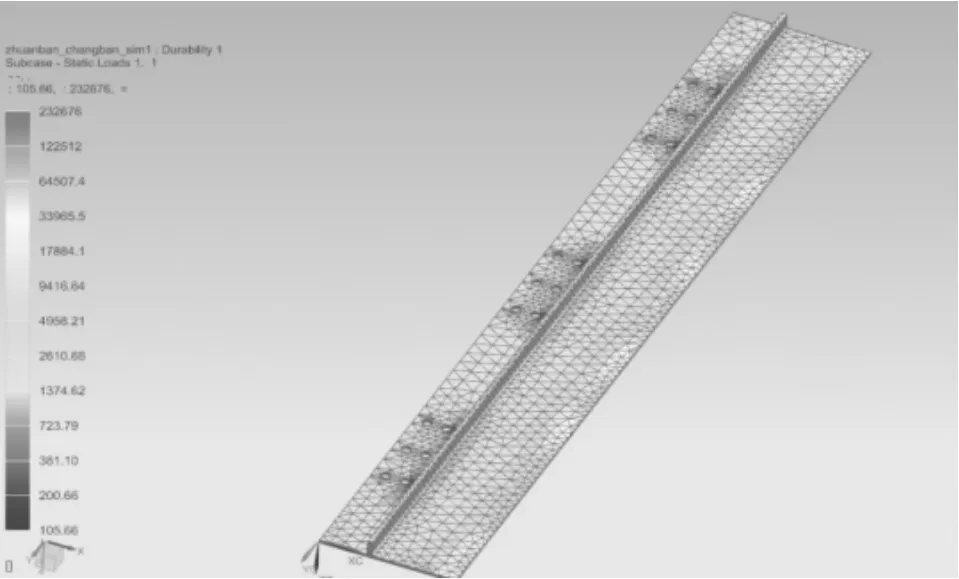
图4 疲劳安全系数结果图

图5 疲劳失效指数结果图
3.4 耐久性分析结论
根据分析结果,强度安全系数最小为103.66,最大为232676,云图的分布情况为,右边缘处的强度先降低,其他位置的强度降低较小;疲劳安全系数最小为167.479,最大为1088270,云图分布情况显示,支撑板不会发生疲劳失效;疲劳失效指数最小为 4.29782×10-6,最大为 0.00946437,根据判断标准,强度安全系数大于1,表明支撑板的强度满足要求,疲劳失效指数小于1,表明支撑板在划分的有限元单元中,不会有单元出现疲劳损坏的情况,说明支撑板的结构设计以及材料选择达到设计目的。
3.5 叠垛的运动仿真
叠垛在被推出时,最下层的产品被推出板推动带动整体叠垛推出,推出时的行程由两段组成,第一段,底层产品与作为支撑的产品相互接触,此时两者的动摩擦系数为0.2,在二段,底层产品与推出平台相接触,此时两者的动摩擦系数为0.12,可以得出,第一段所受的摩擦力最大,底层产品与上层产品分离的趋势也越大,简化模型得,若在第一段情况下,整体叠垛不发生相对位移,就可以保证叠垛在推出过程中不倒塌。
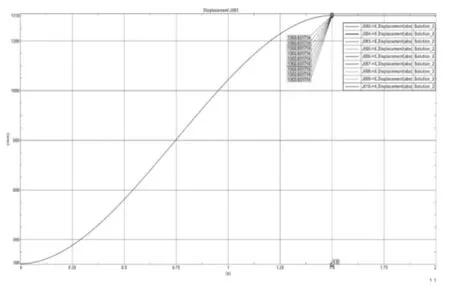
图6 叠垛各产品位移叠加图
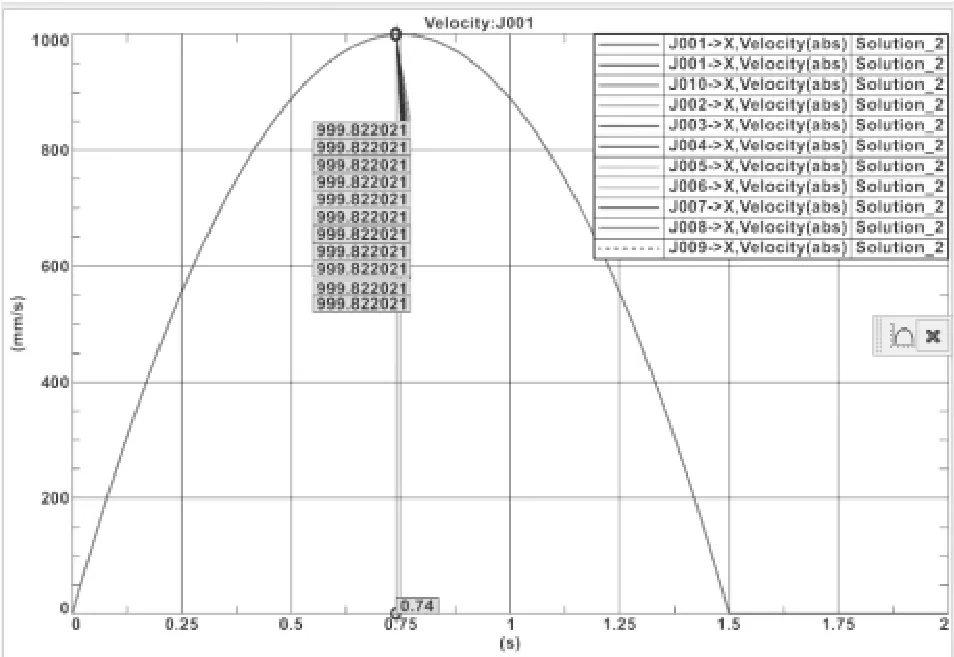
图7 叠垛各产品速度叠加图
在仿真模型中,叠垛中的各个产品可设置为带摩擦的滑动副,而最底层的产品可视为主动件,需要添加驱动函数,利用step 函数时间设定为1.3 秒,行程设定为1000mm,最终求解得到以上曲线图。
3.6 运动仿真结论
为了直观地判断叠垛中的各个产品是否发生相对位移,将叠垛中的十个产品的运动曲线图叠加,叠垛中的其他产品与底层产品的运动曲线相一致,说明叠垛在运动中,在同一时刻具有相同的运动特性,表明叠垛在推出过程中不会发生倾倒。
4 结 语
本文所述的码垛烘干机构,通过设计的转板装置,可以实现产品逐层自动码垛,相比人工码垛,码垛机可以快速完成产品码垛,大大提高企业的生产效率,转板码垛结构更适合产品的特殊形状,造价更低,并通过有限元分析仿真等手段,验证了设计的合理性和可靠性。
